00
-J Изобретение относится к области автоматикн, в частности к устройствам для автоматического поиска экстремума, и может быть использовано для управления различными многока}|альиыми (двухканальяыми) объектами, ха.рактерист1:ки которых подвержены действию случаЙ 1ых возмущений с известными статистическими характеристиками. Известий система, содержащая в каждом ка нале регулирования последовательно соединенные генератор поисковых колебаний, фазосдви гающий блок, множительное звено, фильтр, первый блок умножения, интегратор и сумматор, второй вход которого соединен с выходом генератора поисковых колебаний, а выход - с со тпотсгву1оп им входом объекта регулироваИ Я, н дифференциатор, вход которого соединен с ВЫХОЛ.ОМ объекта регулирования и с вто рьш входом множительного звена каждого ка ншта регулирования. Кроме того, система содержит квадраторрл, блоки умножения, усилитель, блок деления, первый, второй и третий суммируюище усилители и инвертор, причем . квадратор в каждом канале регулирования соединен с выходом фильтра и с первым входом второго блока умножения, выходы квадраторов соединены с соответствующими входами первого суммирующего усилителя, выход которого соединен с первым входом блока деления, выходы вторых блоков умножения соединены с соответствующими входами второго суммирующего усилителя, выход которого через инвертор соединен с первым входом третьего суммирующего усилителя, второй вход которого соединен с выходом дифференциатора, третий вход через усилитель соединен с выходом объекта регулирования, а выход - с вторым входом блока деления, выход которого соедгаген с вторым входом первого блока умножения каждого канала регулирования 1. Известная система регулирования обладает достаточной помехоустойчивостью в случае высокого уровня случайных возмущений, действующих на величш1у выходной характеристики объекта (дрейф экстремума по вешшине), однако появление входных возмущений приводит к нотере работоспособности системы регулирования (дрейф экстремума по параметру). Наиболее близкой к изобретеишо по технической сущности является многоканальная система экстремального регулирования, содержащая в каждом канале регулирования последовательно соед1шеиные дифферендиатор, фильтр низкой частоты, генератор поисковых колебаний, первый выход которого через сумматор соеданен с входом объекта регулирования, а второй выход через фазосдвигающий блок соединен с первым входом синхронного детектора, второй вход которого соединен с выходом объекта регулирования 2. Данная система позволяет увеличить точность и помехоустойчивость работы системы для любого вида возмущений, однако обладает низкой надежностью работ вследствие сложности конструкции. Цель изобретения - повыщеиие надежности многоканальной системы экстремального регулирования. Поставленная цель достигается тем, что в систему, содержащую в каждом канале регулирования последовательно coeдинe шыe дифференциатор, фильтр низкой частоты, генератор поисков1)1х колебаний, первый выход которого через сумматор соединен с . входом объекта регулирования, а второй выход через фазосдвигающий блок соединен с первым входом синхронного детектора, второй вход которого соединен с выходом объекта регулирования, в каждый канал регулирования введено избдромное звено, вход которого через дифференциатор и фильтр низкой частоты соединен с выходом синхронного детектора, а выход соединен с вторым входом сумматора. I На чертеже представлена блок-схема многоканальной системы экстремального регулирования. Система содержит объект 1 регулирования и в каждом канале регулирования синхронный детектор 2, первый вход которого соединен с выходом объекта регулирования, второй вход через фазосдвигающий блок 3 - с выходом генератора 4 поисковых колебаний, а выход через фильтр 5 низких частот, дифференциатор 6 и изодромное звено 7 соединен с входом сумматора 8, второй вход которого соединен с выходом генератора поисковых колебаний, а выход - с входом объекта регулирования. Рассмотрим работу предлагаемой системы на примере работы одного из каналов. Поисковый сигнал с выхода генератора 4 поисковых колебаний поступает через сумматор 8 на вход объекта регулирования. Пройдя через объект регулирования, сигнал посту- . пает на информационный вход синхронного детектора 2. На второй (опорный)вход синхронного детектора поступает сигнал с выхода фазосдвигающего блока 3- На вход фазосдвигающего блока поступает сигнал с выхода генератора 4 поисковых колебаний. Фазосдвигающий блок служит для компенсации постоянных фазовых искажений, возникающих в объекте регулирования. На выходе синхронного детектора образуется сигнал, постоянная
3
составляющая которого пропорциональна значению производной выходной характеристики о&ьекта по входному воздействию. Сигнал с выхода синхронного детектора поступает на вход фильтра низкой частоты (например, апериодическое звено первого порядка). Фильтр низкой частоты предназначен для подавления гармонической составляющей сигнала, таким образом, на выходе фильтра формируется сигнал, пропорциональный значению производной. Сигнал с выхода фильтра 5 низкой частоты, пройдя через дифференциатор 6, изодромное звено 7 и сумматор 8, поступает на вход объекта регулирования. Звенья 6 и 7 служат для улучше1шя динамических характеристик системы регулирования (корректирующие звенья).
Существуют два вида возмуще1 ий, действующих на объект регулирования в системах зкстремального регулирования, причем первые вызывают дрейф экстремума по величине, вторые - по параметру. Система экстремального регулирования должна быть инвариантна к первым и компенсировать вторые.
Вид оптимальной передаточной функции линейной части системы экстремального управления позволяет свести к минимуму среднеквадратичную ощибку системы для возмущений со следз ощими спектральными плотнос Р ft
W)
где Rj, /3, А - статистические параметры спектральных плотностей; СО - частота; А - возмущение, вызывающее дрейф
экстремума по параметру; о - возмущение, вызывающее
дрейф экстремума по величине.
При этом оптимальная передаточная функция линейной части системы принимает вид
vc(p)
т,
ЧР
сг
гдеК(. - параметры передаточной функции, которые определяются из соотношений ,
Те,-
Rofi
1
а
187147
Тс.
Р
J где С1ц, - амплитуда поискового сигнала.
Звенья коррекции в предлагаемой системе должны иметь вид:
При этом параметры звеньев находятся из
соотнощений
Kg
6 к Т
в
KC,
тг.. г
где Kj ч -параметры фильтра низкой
частоты (апериодическое звено первого порядка). Общая передаточная функция линейной части системы при этом имеет вид
«5 . ьР КгрН
W{p} TjpH Тгр
После подставки значений параметров корректирующих звеньев имеем
W(phr-| г-,
1С2
Т.е. полученная передаточная функция совпадает с с .тимальной.
Система экстремального регулирования, реализует оптимальную передаточную функцию линейной части системы, таким образом по своим динамическим характеристикам, в частности по точности и помехозащищенности, не уступает последней. Однако предлагаемая система обладает простой структурой, содержит мало корректирующих звеньев и контуров обратной связи, что приводит к повыщению наде И1Ости работы системы.
Например, при реализации каждого корректирующего звена на одном операционном усилителе они оказьшаются последовательно соединенными в смысле надежности работы системы экстремального регулирования в целом.
В системе в каждом канале регулирования «шсло корректирзтощих звеньев уменьшено в 2,5 раза, поэтому наработка на отказ для каждого канала регулирования увеличивается более, чем в два раза.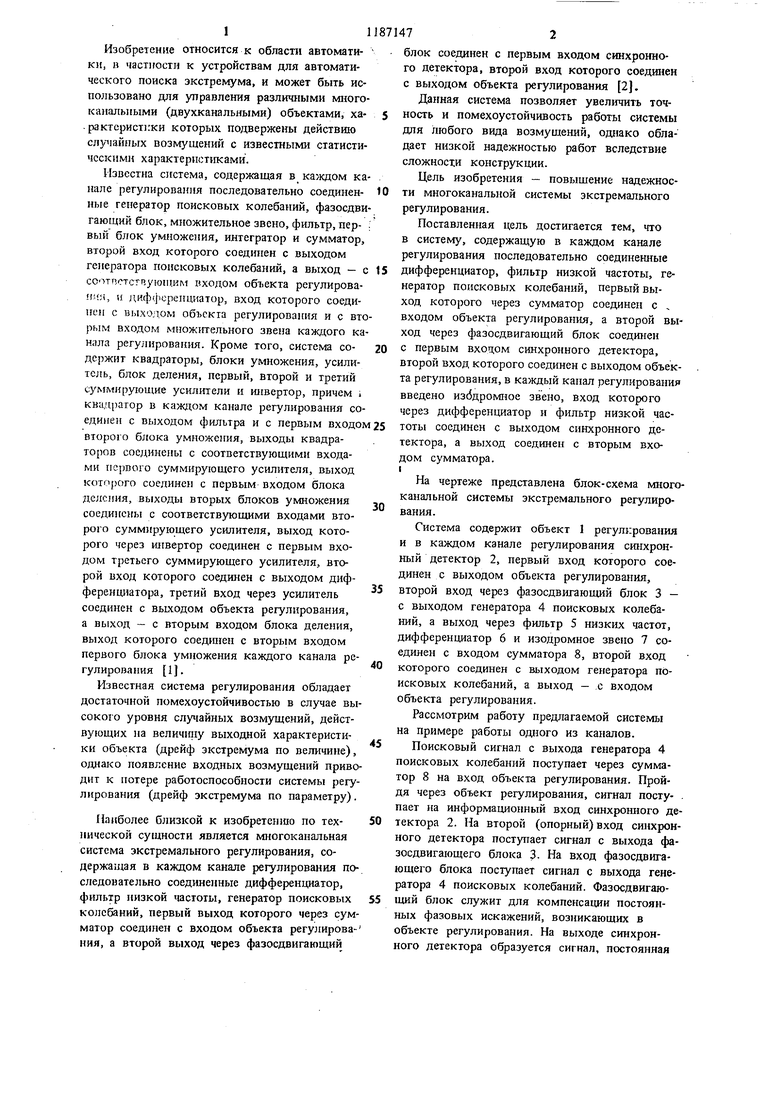
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Система экстремального управления | 1980 |
|
SU894672A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Система экстремального регулирования | 1989 |
|
SU1640673A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Система экстремального регулирования | 1980 |
|
SU888069A1 |
| Система экстремального регулирования | 1980 |
|
SU888070A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
МНОГОКАНАЛЬНАЯ СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ, содержащая в каждом канале регулирования последовательно соединенные дифференциатор, фильтр низкой частоты, генератор поисковых колебаний, первый выход которого через сумматор соединен с входом объекта регулирования, а второй выход через фазосдвигающий блок соединен с первым входом синхронного детектора, второй вход которого соединен с выходом объекта регулирования, отлич ающаяс я тем, что, с целью повышения надежности системы, в каждый канал регулирования введено изодромное звено, вход которого через дифференциатор и фильтр низкой частоты соединен с выходом синхронного детектора, а выход соединен с вторым входом сумматора.
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
