1
Изобретение относится к автоматике, в частности к устройствам для автоматического поиска экстремума, и может быть использовано для управления различными многоканальными (двухканальными объектами, характеристики которых подвержены действию случайных возмущений с известными . статистическими характеристиками.
Известны многоканальные систекгл экстремального управления, содержащие в каждом канале генератор поискового гармонического сигнала, первы выход которого через сумматор соединен с соответствующим входом объекта, а второй выход - с первым входом синхронного детектора, второй вход которого соединен с выходом объекта, а выход через последовательно соединенные фильтры и исполнительный механизм (интегратор соединен со вторым входом сумматора Г.
Известны многоканальные системы экстремального управления, содержащие в каждом канале генератор поискового сигнала, первый выход которого через первый сумматор соединен с соответствующим входом объекта, а второй выход - с первым входом синхронного детектора, второй вход которого соединен с выходом объекта, который через последовательно соединенные второй сумматор, фильтр и интегратор соединен со вторым входом первого сумматора, а выход фильтра соединен со вторым входом второго сумматора 2 .
Однако известные систем обладают нивкой точностью при наличии высокого уровня возмущений, действующих как на величину выходной характеристики объекта, так и на входной . параметр.
Наиболее близкой по технической сущности к предлагаемой является многоканальная система экстремального регулирования, содержащая в Кс1Ждом канале регулирования первый сумматор, дифференциатор и генератор поисковых колебаний, первый выход которого через второй сумматор соединен с соответствующим входом объекта регулирования, а второй выход через первый фазосдвигающий блок - с первым входом синхронного детектора, ко второму входу которого подключен выход объекта регулирования, а выход через последовательно соединенные третий сумматор и фильтр - ко входу интегратора з
В известной системе повышение помехоустойчивости обеспечивается TOJjbKO в случае высокого уровня случайных возмущений, действующих на величину выходной характеристики объекта (дрейф экстремума по величине), однако не учитываются возмущения, действующие на вход .объекта управления дрейф экстремума по параметру) и именно этот вид возмущений понижает точность рабочих характеристик системы и может даже привести к потере работоспособности систем
Целью изобретения, является повышение точности и помехоустойчивости многоканальной cHCTeNti экстремального управления.
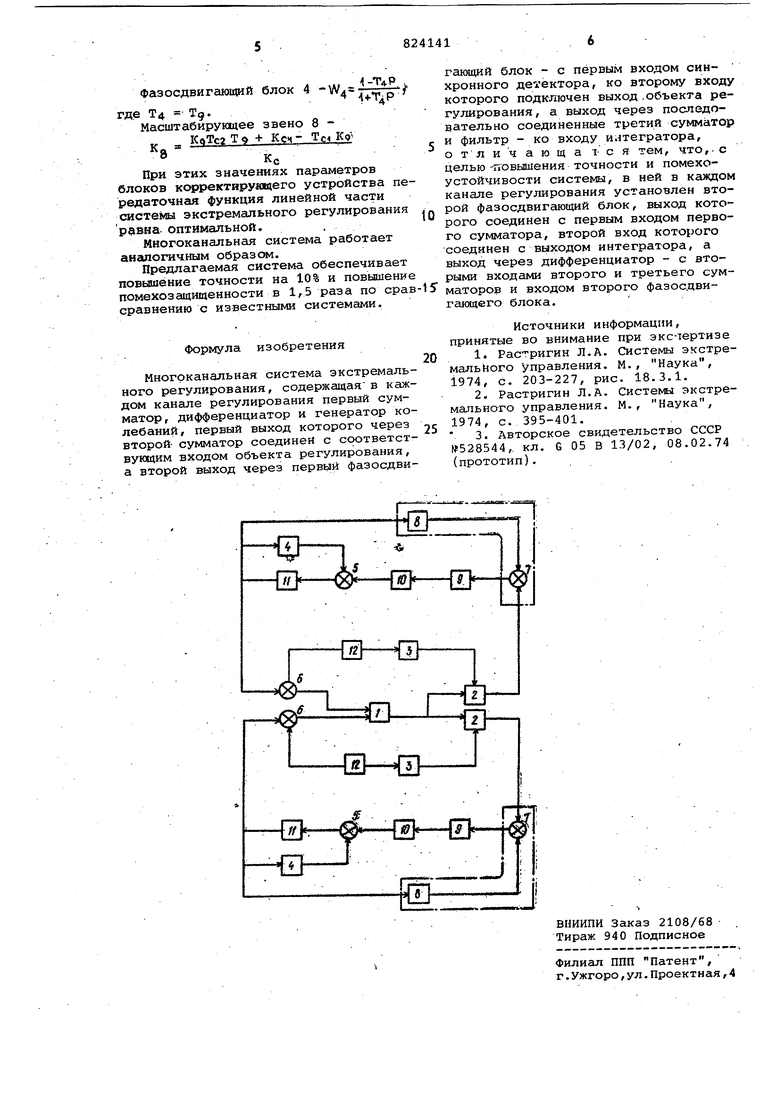
Поставленная цель достигается тем, что в системе в каждом канале регулирования установлен второй фазосдвигающий блок, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с выходом интегратора, а выход через дифференциатор - с вторыми входами второго и третьего сумматоров и входом второго фазосдвиггиющего блока. Блок-схема системы представлена на чертеже.
Система содержит объект 1, синхронный детектор 2, первый и второй фазосдвигающие блоки 3 и 4, первый второй и третий сумматоры 5, 6 и 7 масштабирующий блок 8, фильтр 9, интегратор 10, дифференциатор 11, генератор 12 поисковых колебаний.
Двухканальная система экстремального регулирования работает следующим образом.
Поисковые системы с генераторов 12 поисковых колебаний подгиотся на входы объекта через сумматоры 6 и пройдя через объект 1, поступают на информационные входы синхронных детекторов 2. Эти же сигналы с выхода генераторов 12 поисковых колебаний поступают на входы фазосдвигающих блоков 3, компенсирующих сДвиг фазы в объект 1 и, пройдя через фазосдвигающие блоки 3, поступают на опорные входы синхронных детекторов 2,.Сигналы с выходов синхронных детекторов 2 через сумматоры 7 поступают на входы фильтров 9 (например апериодических звеньев первого порядка) . На выходе фильтров 9 формируется сигнал, пропорциональный производной выходной характеристике объекта 1 по данному парс1метру, который поступает на вход интегратора 10 (исполнительный механизм). Блоки 7 и 8 дифференциатор 11, фазосдвигающий блок 4 и сумматор 5 служат для коррекции системы (т.е. входят в состав корректирующего Устройства).
Выходной сигнал интегратора 10 поступает на дифференциатор 11 через сумматор 5. Выходной сигнал дифференциатора 11 в сумматоре 6 суммируется
с сигналом генератора 12 поисковых колебаний. Кроме того, указанный сигнал с весом Kg суммируется в сумматоре 7 с выходным сигналом синхронного детектора 2. И, наконец, через фазосдвигающий блок 4 он подается на вход сумматора 5, где суммируется с выходным сигналом интегратора 10, Шходные сигналы с сумматоров б воздействуют на объект 1 регулирования таким образом, чтобы регулируемая координата стремилась к своему экстремальному значению.
Существуют два вида случайных возмущающих воздействий, действующих на объект управления в экстремальных системах управления - это дрейф экстремума по величине и параметру. Для устойчивой и качественной работы система не должна реагировать на первый вид возмущений и отрабатывать второй. Существует метод Винера-Колмогорова, позволяющий определить передаточную функцию линейной части системы -экстремального управления, минимизирующую среднеквадратичную ошибку системы при условии устойчивой работы системы, для заданных спектральных плотностей возмущений
(Л возмущения, воздействующие на вход объекта - возмущения, воздействующие на выход объекта; где RO , Р) , Л - статистические парамет5ры спектральных плотностей;СО - частота; fV - возмущение, вызывающее
дрейф экстремума по па0раметру;
о - возмущение, вызывающее дрейф экстремума по величине.
В этом случае передаточная функция линейной части системы экстремального
управления имеет вид
Кг
«clPl- r; :
где Kf., Т,, параметры передаточ0ной функции, выбираются в зависимости от параметров спектральных плоскостей возмущений, действующих на систему .
Блоки, входящие в состав корректирующего устройства предлагаемой системы, имеют следующие передаточные функции
Дифференциатор 11 -WJ(D
Рде к Т - КсТ. Р Тиргде л,, - i -„ т, т,
6 Tq, Kg - параметры передаточной
5функции фильтра 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Система экстремального управления | 1980 |
|
SU894672A1 |
| Система экстремального регулирования | 1980 |
|
SU888069A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Система экстремального регулирования | 1980 |
|
SU888070A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Система экстремального регулирования | 1989 |
|
SU1640673A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
