1
Изобретение предназначено для управления различными многоканальными объектами, преимущественно такими, свойства которых подверл ены случайным возмущения.м в широких Пределах.
Известны многоканальные системы экстремального регулирования, содержащие дифференциатор, детектор-ограничитель и в каждом канале генератор иоисковы.х колебаний, блок умножения и интегратор 1, или содержащие дифференциатор, релейный элемент и в каждом канале генератор поисковых колебаний, триггер и интегратор 2. Такие системы имеют сравнительно низкую точность.
Иаиболее близкой по технической сущности к данному изобретению является система, содержащая в каждом канале регулирования -последовательно соединенные генератор поисковых колебаний, фазосдвигающий блок, синхронный детектор, фильтр, первый блок умножения, интегратор и сумматор, второй вход которого соединен с выходом генеоатора ПОИСКОВЫХ колебаний, а выход-с соответствующим входом объекта регулирования, и дифференциатор, вход которого соедипеп с выходом объекта регулирования и со вторым входом синхронного детектора каждого канала регулирования 3.
В известной системе на выходах фильтров образуются сигналы, пропорциональные коорdQ,.
динатам -- градиента вы.ходного сигнала Q
объекта но его в.ходным сигналам t/,, где i 1, 2, ... rt.
Эта система реализует градиентный метод поиска экстрему.ма в соответствии с уравнением
dQ
dU,
jl ,где и I скорость изменения управляющего (входного) сигнала в i-ом канале; постоянный коэффициент усиления ( поиске минимума и при поиске максимума Q).
Алгоритм работы известной системы определяется следующим уравнением:
iQ -L Q
дг
из которого следует, что прИ больщих (по абчдо
солютнои величине) значениях сигнала - ,
характеризующего дрейф экстремума, знак и
fifO величина сигнала - определяются спгналом
dQ
и система в этом случае нередко теряет
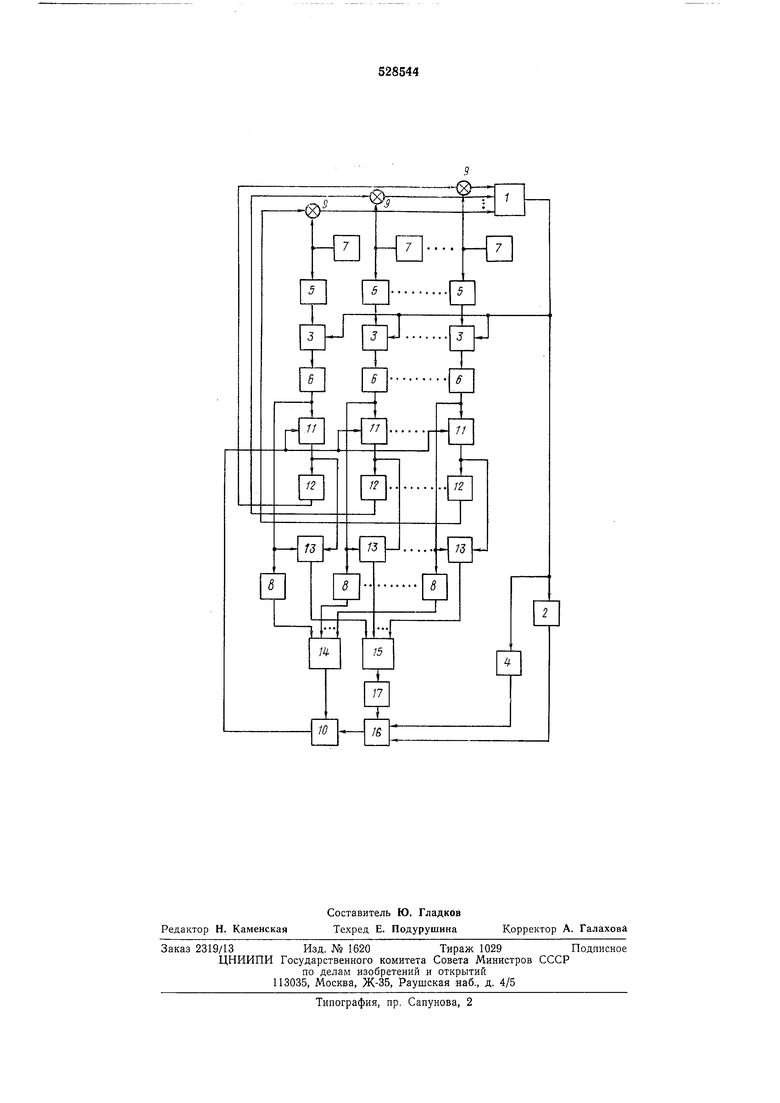
30 dt устойчивость. Такие ситуации на практике л озиикают довольно часто, в особенности, При управлении различными технологическими процессами. Целью изобретения является повышение точности и устойчивости многоканальной системы экстремального регулирования в условиях дрейфа экстремума. Это достигается тем, что в многоканальной системе экстремального регулирования установлены квадраторы, блоки умножеиия, усилитель, блок деления, первый, второй и третий суммирующие усилители и инвертор, причем квадратор в каждом канале регулирования соединен с выходом фильтра и с первым входом второго блока умножения, второй вход которого соединен с выходом первого блока умножения, выходы квадраторов соединены с соответствующими входами первого суммирующего усилителя, выход которого соединен с первым входом блока деления, выходы вторых блокоВ умножения соединены с соответствующими входами второго суммирующего усилителя, ВЫХОД которого через инвертор соединен с первым входом третьего суммирующего усилителя, второй -вход которого соединен с выходом дифференциатора, третий вход через усилитель соединен с выходом объекта регулирования, а выход-со вторым входом блока деления, выход которого соединен со вторым входом первого блока умножения каждого канала регулирования. На чертеже представлена блок-схема предлагаемой многоканальной системы экстремального регулирования. Многоканальная система экстремального регулирования содержит объект регулировапия 1, дифференциатор 2, синхронные детекторы 3, усилитель 4, фазосдвигающие блоки 5, фильтры 6, генераторы 7 поисковых колебаний, квадраторы 8, сумматоры 9, блок 10 деления, первые блоки 11 умножения, интеграторы 12, вторые блоки 13 умножения, первый, второй и третий суммирующие усилители 14, 15, 16 и инвертор 17. Многоканальная система экстремального регулирования работает следующим образом. До включения системы в режим нормальной эксплуатации выбирают и устанавливают в генераторах 7 амплитуды и частоты поисковых колебаний, причем частоты должны быть существенно больше, а амплитуды существенйо меньше соответствующих параметров управляющих сигналов f/i, Uz ... Un объекта регулирования. Кроме того, выбирают и устанавливают коэффициент усиления усилителя 4 и начальные условия интеграторов 12. Затем включают систему экстремального регулирования в режим нормальной экаплуатации. В процессе работы сигналы с генераторов поисковых колебаний подаются на входы объекта регулирования 1 и фазосдвигающне блоки 5 и, пройдя через них, поступают на входы детекторов 3 и затем фильтруются фильтрами 6. На выходах фильтров 6 формируются сигналы, пропорциональные-- -, которые служатдля определения градиента gradQ :f, ,... ди.,ди„ выходного сигнала объекта регулирования I по его управляющим сигналам Ui, Uz, ... Un. На входы блоков 11 поступают сигналы с выходов фильтров 6 и сигнал с выхода блока деления, пропорциональный коэффициенту усиления (К системы экстремального регулирования. На выходе блоков 11 формируются сигналы, пропорциональные /С-, которые в соответствии с градиентным методом поиска экстремума равны скорости изменения управляющих сигналов в данном канале нерегулированпя (t/, -/С-, г 1, 2,.. .п ) . Эти VdUiJ сигналы интегрируются в интеграторах 12 (т. е. формируются управляющие сигналы f/,) и подаются на соответствующие входы объекта регулирования 1. Сигналы с выходов фильтров 6 и блоков 11 подаются на входы блоков 13, на выходе которых образуются сигналы, г, dQ „ пропорциональные и --. Эти сигналы в суммирующем усилителе 15 суммируются, в блоке 17 инвертируются и «а первый вход суммирующего усилителя 16 подается сигнал, равный На второй вход усилителя 16 подается сигнал с выхода дифференциатора 2, равный aQ (а-коэффициент усиления усилителя 4; предполагается, что усилитель 4 имеет инвертирующий и неинвертирующий входы и переход от поиска минимума к поиску максимума осуществляется перекоммутадией этих входов). На третьем входе усилителя 16 сигнал раен выходному сигналу дифференциатора 2: . Выходной сигнал усилителя 16 равен сумме его входных сигналов: aQ + ,-«Q + Q,. «.
Сигналы на входе и выходе каждого из
до
квадраторов 8 равны соответственно -- и
1/С/
- . Сигнал на выходе суммирующего I
лителя 14 и соответственно иа первом входе
f dQ
. Сигнал на выходе
блока 10 равек
(dUi
блока 10, а следовательно, коэффициент усиления системы экстремального регулирования равен
Q + Qt
(dQ/du ri
Регулирование коэффициента усиления К по этому закону позволяет в многоканальной системе экстремального регулирования отслеживать дрейфующий но произвольному закону экстремум. В самом деле, подстановка правой части выражения для К в соотношение, справедливое для градиентного метода,
П П L А- / +
дает
или Q(/)Q(o)e-.
Следовательно, каков бы ни был дрейф экстремума, характеризующийся величиной
ао
Q -, работа многоканальном системы экстремального регулирования описывается монотонно иевозрастающим (при поиске минимума ) или неубывающим (-при поиске максимума ) выходным сигналом Q. Вследствие этого после затухания влияния начальных условий рабочая точка попадает в экстремум и далее отслеживает его независимо от характера дрейфа.
Введение дополнительных блоков перемножения и квадраторов в каждом канале, усилителя, инвертора, блока деления и трех су.ммирующих усилителей позволяет повысить устойчивость предложенной многоканальной системы экстремального регулирования при отслеживании дрейфующего по произвольному закону экстремума и повысить точность ее
работы по сравнению с известными системами по меньшей мере в два раза.
Формула изобретения
Многоканальная система экстремального регулирования, содержащая в каждом канале регулирования последовательно соединенные генератор поисковых колебаний, фазосдвигающий блок, синхронный детектор, фнльтр,
первый блок умножения, интегратор и сумматор, второй вход которого соединен с выходом генератора поисковых колебаний, а выход-с соответствующнм входом объекта регулирования, и дифференциатор, вход которого соединен с выходом объекта регулирования и со вторым входом синхронного детектора каждого канала регулирования, отличающаяся тем, что, с целью повышения точности и устойчивости работы системы, она
содержит квадраторы, блоки умножения, усилитель, блок деления, первый, второй и третий суммирующие усилители и инвертор, причем квадратор в каждом канале регулирования соединен с выходом фильтра и с первым
входом второго блока умнол ения, второй вход которого соединен с выходом первого блока умножения, выходы квадраторов соединены с соответствующими входами первого суммирующего усилителя, выход которого соединен с первым входом блока деления, выходы вторых блоков умнол ення соединены с соответствующими входами второго суммирующего усилителя, выход которого через инвертор соединен с первым входом третьего
суммирующего усилителя, второй вход которого соединен с выходом дифференциатора, третий вход через усил-итель соединен с выходом объекта регулирования, а выход-со вторым входом блока деления, вы.ход которого соединен со вторым входом первого блока умножения каждого канала регулирования.
Источники информации, принятые во внимание при экспертизе изобретения:
1.Авт. св. ЛЬ 334550 кл. G 05в 13/02, 11.11. 1969 г.
2.Авт. св. 404053, кл. G 05в 13/02, 30.03.1971.
3.Б. Ю. Мандровский-Соколов и др. Системы экстремального управления при случайных возмущениях, «Каукова думка, Кнев, 1970, стр. 20-22.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Самонастраивающийся регулятор | 1986 |
|
SU1432458A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| УСТРОЙСТВО для ПОИСКА ЭКСТРЕМУМА | 1972 |
|
SU334550A1 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |