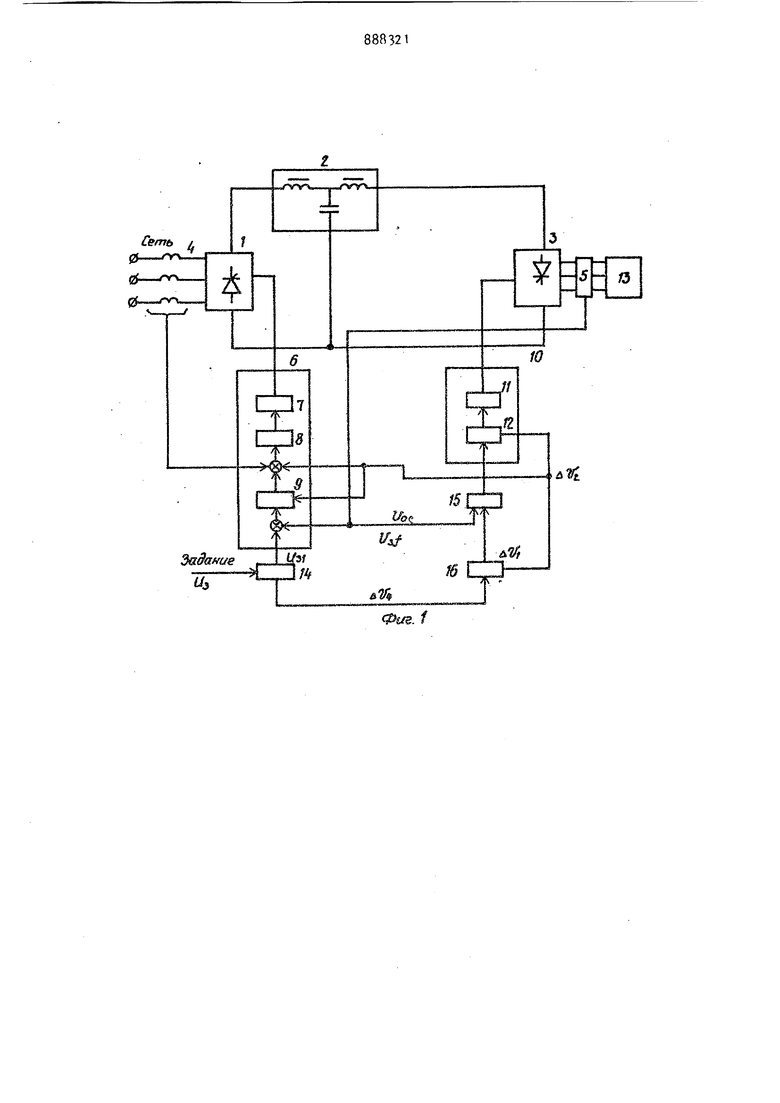
Изобретение относится к электротехнике и может быть использовано в частотно-регулируемых приводах переме ного тока. Известен преобразователь частоты для частотно-регулируемого привода, который содержит последовательно соединенные регулируемый выпрямитель, R-C- фильтр и автономные инвертор напряжения, включающий мост основнь1х ти ристоров, к зажимам переменного тока которого подключен асинхронной дви гатель, мост диодоа обратного тока и устройство для коммутации основных ти ристоров, систему управления регулиру емом ы прямитеяем и систему управления автономным инвертором, датчик напряжения асинхронного двигателя и устройство для торможения двигателя схему ИЛИ,, пороговое устройство и цепь, содержащую два последовательно соединенных блока, каждый из которых выполнен из последовательно включенных тиристора и резистора, точка соединения указанных блоков связана с точкой соединения основных тиристо ров, а управляющие электроды тиристоров упомянутых блоков подключены к формирователю управляющих импульсов, управляющий вход которого подключен к выходу схемы ИЛИ, а один ий управляющих входов схемы ИЛИ подключен через пороговое устройство к датчику напряжения, при этом второй управляю щий вход схемы.ИЛИ подключен к устройству торможения двигателя tij. Торможение двигателя в таком преобразователе частоты осуществляется за счет того, что при включении тиристора одного из блоков ток торможения протекает через упомянутый тиристор, резистор и основной тиристор противоположного плеча фазы, к которой подключены упомянутые блоки, и вследствие протекания тока через резистор энергии торможения рассеивается на нем. Через 80 электрических периода выходной частота основной тиристор инверторного моста выключается, а включает ся основной тиристор противоположного плеча инверторного моста, который шунтирует резистор и последовательно с ним 8К.пюченный тиристор, а также включает тиристор противоположного блока и ток торможения протекает аналогично описанному. Описанный преобразователь обеспечивает эффективное торможение двигателя, а так же режим подтормаживания. Недостатком такого преобразователя является повышенная сложность, которая определяется наличием двух дополнительных силовых тиристоров, резисторов, схемы для управления двумя силовыми тиристорами, схемы ИЛК и порогового устройства. Кроме того, такой преобразователь должен быть выполней по схеме инвертора напряжения, что ограничивает его область применения и ие позволяет выполнить преобра-зователь по схеме, например, инвертору тока с отсекающими диодзми. Наиболее близким техническим решением к предлагаемому изобретению является преобразователь частоты для частотно-регулируемого электропривода, содержащий регулируемый выг5)ямитель, фильтр и ийвертор, соединенные между собой последовательно, систему управления регулируемым выпрямителем, включающую последовательно соединенны между собой регулятор напряжения, регулятор тока и фазосдвигающий блок, выход которого подключен к управляюще му входу указанного выпрямителя, систему управления инвертором, включающую последовательно соединенные между собой задающий генератор и кольцевой распределитель, выходом связанный с управляющим входом инвертора, датчик тока, включенный на входе регулируемого выпрямителя, а выходом подключен ный ко входу регулятора тока, датчик напряжения инвертора, выходом подключенный к регулятору напряжения, задат чик интенсивности, один выход которого соединен с одним входом регулятора напряжения, и блок торможения с двумя выходами 2 . Данный преобразователь обеспечивает режим динамического торможения с заданной скоростью до полной остановки привода. Однако он не реализует режим подтормаживания (режим переходу с одной скорости на другую). Так, в известном преобразователе для перехода со скорости п-, (50 Гц) на скорость Пл (5 Гц) необходимо вначале двигатель затормозить до нулевой скорости, а затем разогнать до скорости п,- что значительно увеличивает время перехода с одной скорости на другую и не дает возможности использовать его . в таких электроприводах, в которых останов привода не допускается (например, для машин вытяжки искусственных нитей), так как останов двига.елей приводит к полимеризации массы в фильерах и порче машины. Целью изобретения является расширение функциональных возможностей за счет обеспечения режима подтормаживания. Цель достигается тем, что в преобразователь частоты введена схема ИЛИ, выход которой подсоединен к первому входу задающего генератора, один вход схемы ИЛИ подсоединен к выходу датчика напряжения, второй вход схемы ИЛИ подсоединен к одному выходу блока торможения, а второй выход блока торможения соединен со входом задающего генератора, со вторым входом регулятора напряжения, и входом регулятора тока, а управляющий вход блока торможения подсоединен ко второму выходу задатчика интенсивности. На фиг. 1 представлена схема преобразователя частоты; на фиг. 2 - временные диаграммы. Преобразователь частоты содержит регулируемый выпрямитель 1, включенный последовательно с фильтром 2 и автономным инвертором 3. Ток преобразователя измеряется датчиками 4 тока, которые установх1ены на входе выпрямителя, а напряжение измеряется с помощью датчика 5 напряжения, который может включаться либо в звене постоянного тока, либо на выходе инвертора. Регулируемый выпрямитель 1 управляется системой б управления регулируемым выпрямителем, которая содержит фазосдвигающий блок 7, регулятор В тока регулятор 9 напряжения. Автономный нвертор 3 управляется системой 10 правления автономным инвертором, коорая содержит кольцевой распределиель 11 и задающий генератор 12. К ыходу автономного инвертора 3 подлючена нагрузка, например, асинхроный электродвигатель 13. Сигнал задаия поступает на вход блока 1 задания, апример задатчика интенсивности. К
первому входу задающего генератора 12 подключен выход схемы ИЛИ 15, первый вход которой подключен к выходу датчика 5 напряженияf а второй вход схемы ИЛИ подключен к первому выходу блока 16 торможения, второй выход которого соединен со входом задающего генератора 12, блокирующим его работу, а также со входом регулятора 9 напряжения, блокирующим его работу, и входом регулятора 8 тока. Управляющий вход блока 16 торможения соединен со вторым входом задатчика k интенсивности, на указанном выходе которого формиру.ется сигнал о начале и конце торможения электродвигателя.
Преобразователь работает следующим образом.
Выпрямление сетевого напряжения осуществляется с помощью выпрямителя 1, Далее выпpя лeннoe напряжение сглаживается с фильтра 2, Выпрямленное и сглаженное напряжение поступает на эход инвертора 3, где оно преобразуется в напряжение регулируемой частоты. Управление регулируеьь)м выпрямителем осущестэляется фазосдвигающим блоком 7, угол сдви-а которого регулируется с помощью двухконтурной системы регулирования, включающий внутренний подчиненный контур регулирования тока и внешний контур регулирования напряжения. При подаче нала Задание на вход задатчика 1 ин. тенсивности на выходе его получаем преобразованный, плавно изменяющийся во времени с необходимым темпом сигнал задания, который поступает на вход регулятора напряжения. Выходной сигнал с регулятора напряжения поступает на вход регулятора тока, с выхода которого сигнал поступает на вход фазосдвигающего блока 7. Изменяется угол регулирования выпрямителя 1 и на выходе его появляется напряжение. Задающий генератор 12 работает с начальной частотой и электродвигатель начинает вращаться. Напряжение по мере разгона электродвигателя 13 растет и с выхода датчика 5 напряжения поступает через схему ИЛИ 15 на первый вход задающего генератора 12, что приводит к росту частоты, и электродвигатель продолжает разгоняться. Величина тока ограничивается регулятором тока. РОСТ напряжения и частоты продолжается до величины, определяемой сигналом задания.
Торможение электродвигателя осуществляется следующим образом.
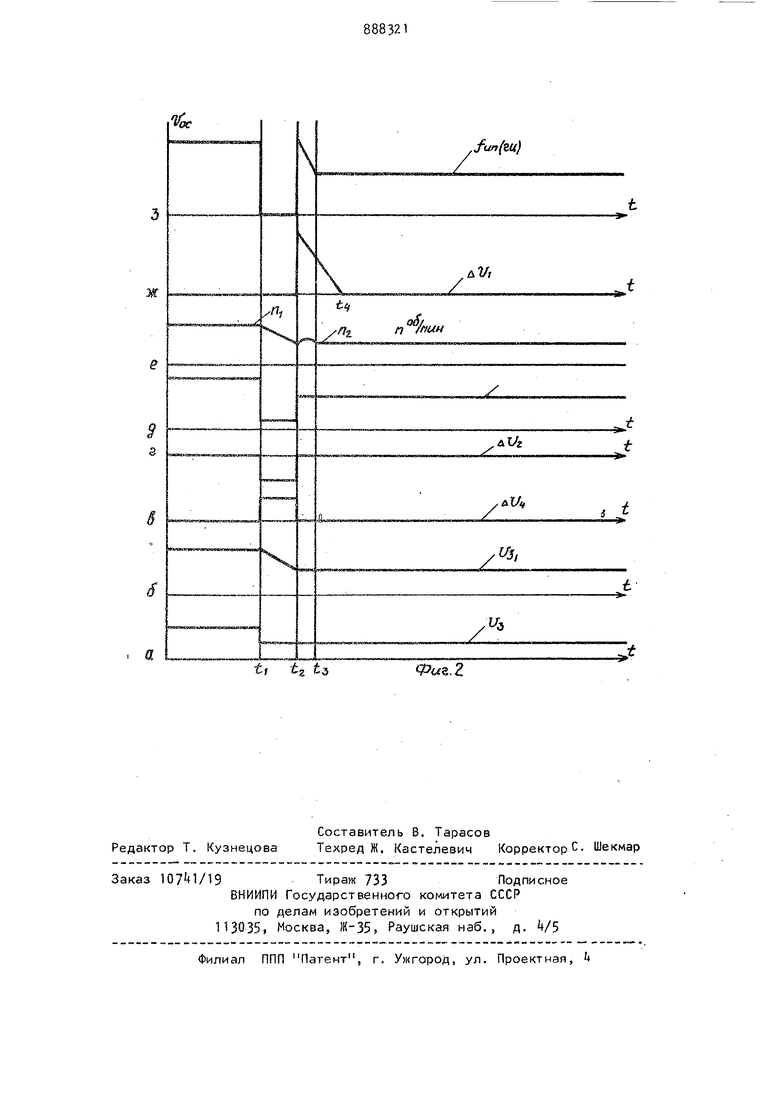
При уменьшении сигнала задания U (фиг, 2а, момент t) на входе задатчика 1 интенсивности его выходной сигнал Uj начинает также уменьшаться с заданным темпом (фиг, 26, момент t,j-t,j). Одновременно на втором выходе зздатчика 1 интенсив:юсти появляется сигнал лJ4 (фиг, 2в, момент t), который поступает на вход блока 16 торможения. Выходкой сигнал ди„ (фиг, 2г, момент t ) с выхода блока-. 16 торможения поступает на вход задающего генератора 12, он прекращает свою работу, и его импульсы не поступают на кольцевой распределитель 11. Это приводит к тому, что в автономном инверторе 3 остаются включенными
два или три тиристора в зависимости от способа управления (120 и 180-градусная проводимость) тиристора - - инвертора, и статорные обмоткм электродвигателя 13 обтекаются постоянным током,,,
Происходит динамическое торможение электродвигателя 13. Величина тока электродвигателя ограничивается регулятором 8 тока на заданном уровне. При этом уровень тока торможения зздается уровнем сигнала &(г, поступающего на вход регулятора 8 тока. Одновременно сигнал л UQ поступает на регулятор 9 напряжения, блокируя его таким образом, что его выходной сигнал равен нулю. Величина напряжения (фиг.2д) на статоре асинхронного электродвигателя 3 равна падению напряжения на его активном сопротивлении. За время торможения (момент , фиг, 2е)
скорость электродеигателя изменяется с п до п.. Когда сигнал задания на выходе задатчика И интенсивности ст.знет равным сигналу Уо, на зходе-сигнал.ди (момент t, фиг. 28) исчеза. это приводит к тому, что снимается сигнал 4 UQ, блокирующий задающий генератор 12 и регулятор. 9 напряжения. Блок 16 торможения с мo «энтa tj (фиг, 2ж) вырабатывает сигнал uU, который через схему ИЛИ 15 поступает на вход задающего генератора 12, Амплитуда сигнала i и., выбирается таким образом, чтобы выходная частота преобразователя в момент tQ (фиг, 2з) была равна максимальной, С момента „ регулятор 9 напряжения находится в на.сыщении, так как О и выдает, сигнал задания на регулятор 8 тока (величина этого сигнала выбирается из 7 перегрузочной способности электродвигателя). Регулятор 8 тока поддерживает амплитуду тока., и по статору электродвигателя 13 протекает переме ный ток с частотой fcr , убывающей с определенным темпом (момент , фиг. 2з). В момент времени t (фиг.2 когда частота t| вращения поля статора станет равна частоте вращения ротора, происходит сцепление потока статора с ротором. При этом появляет выходное напряжение (фиг. 2д) на выходе преобразователя и на задающий генератор 12 через схему ИЛИ 15 и на вход регулятора 9 напряжения поступз ет сигнал UOD с датчика 5 напряжения С этого момента (t фиг. 2ж) сигнал &U, спадающий к моменту 1д до нуля, не оказывает влияния на процессы в электродвигателе. Внешний регулятор 9 напряжения с момента t зступает в работу, поддерживая нужное напряже ние на статоре электродвигателя 13 а, соответственно, и частоту f. Данное техническое решение позволяет упростить силовую схему преобра зователя за счет введения новых элементов системы управления, что позво лило осуществить динамическое торможение двигателя более простыми сред ствами, ис лючая при этом мощьйие си ловые элементы, так как функции исключенных силовых элементов выполняю элементы автономного инвертора и вве денные маломощные управляющие элемен ты и, таким образом, это позволило упростить устройство в целом. Наряду с торможением до нулевой частоты вращения может быть осуществле но подтормаживание, что расширяет функ циональные возможности известного ус роиства. Формула изобретения Преобразователь частоты для частотно-регулируемого электроприводгэ, содержащий регулируемый выпрямитель, фильтр и инвертор, соединенные между собой последовательно, систему управления регулируемым выпрямителем, включающую последовательно соединенные между собой регулятор напряжения, регулятор тока и фазосдвигающий блок, выход которого подключен к управлякхде-му входу указанного выпрямителя, систему управления инвертором, включающую последовательно соединенные между собой задающий генератор и кольцевой распределитель, выходом связанный с управляющим входом инвертора, датчик тока, включенный на входе регулируемого выпрямителя, а выходом подключенный ко входу регулятора тока, датчик напряжения инвертора, выходом подключенный к регулятору напряжения, задатчик интенсивности, один выход которого соединен с одним входом регулятора напряжения, и блок торможения с двумя выходами, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения режима подтормаживания при переходе с высшей скорости на низшую, преобразователь частоты снабжен схемой ИЛИ, выход которой подключен к первому входу задающего генератору, один вход схемь ИЛИ соединен с выходом датчика напряжения, другой вход схемы ИЛИ подключен к одному выходу блока торможения, другой выход которого связан со входом задающего генератора, со входом регулятора тока и со вторым входом регулятора напряжения, а управляющий вход блока торможения подключен ко второму выходу задатчика интенсивности. Источники информации, принятые во внимание при экспе(тизё 1.Ааторское свидетельство СССР по заявке № 2521249/0/, кл. Н 02 Р , 1977. 2.Авторское свидетельство СССР tf 9299U кл. Н 02 Р , 1973.
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым электроприводом | 1978 |
|
SU741399A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| Частотно-регулируемый электропривод | 1977 |
|
SU748751A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Частотно-регулируемый привод | 1977 |
|
SU738089A1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
а
tjty tz
Фае. 2
