I
Изобретение относится к электротехнике и может быть использовано для управления частотно-регулируемыми элект-i роприводами в различнык отраслях промышленности: текстильной, химической, мет1аллургической и ар.
Известно устройство для управления частотно-регулируемым электроприводом, содержа111ее задачик интенсивности и эмиттерный повторитель 1.
Недостатком такого устройства для управления частотно-регулируемым электроприводом является то, что оно не обеспечивает получение на его выходе двух релейных сигналов, т. е. не обеспечивает реверса электропривода.
Наиболее близким техническим решением к изобретению по технической сущности является устройство для управлеНИН частотно-регулируемым электроприводом, которое содержит преобразователь частоты, подключенный к асинхронному двигателю, включающий соединенные между собой автономный инвертор, узел ком-
мутации, регулируемый источнТ1к с фильтром i блоки управления частоты и напряжения, выходы которых подключены к преобразователю частоты, датчик частоты вращения, цепь, состоящую из последовательно соединенных двух усилителей, блока выбора полярности.аналогового сигнала, задатчика интенсивности, выход которого связан со входами блоков регулирования частоты и напряжения преобразова10теля, пороговое устройство .
Устройство работает следующим образом. Постоянный сигнал управления в зависимости от установленных величин сопротивления и емкости в задатчике интен.15 сивности заряжает времязадающую емкость. Полярность напряжения на времязадаюшей емкости определяется полярностью сигнала управления. В зависимости ох полярности напряжения на время-
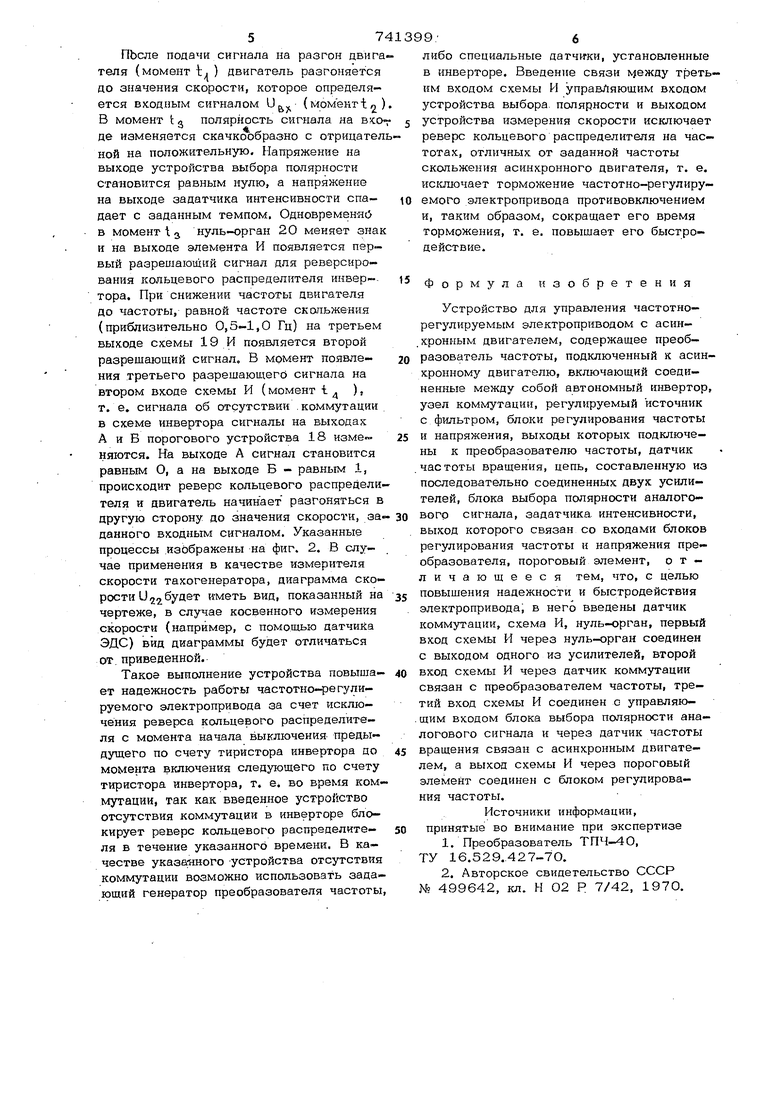
20 задающей емкости отпирается один из усилителей и на выходе порогового устройства, подключенного к открытому усилителю, появляется сигнал, который опрв- 37 депяет направление вращения алектропривода. Сигнал с выхода открытого усилите ля в аналоговой форме через устройство выбора полярности (диоды), поступает в устройство управления частотой электр привода и определяет частоту, вращения электропривода. Недостатком известного устройства для управления частотно-регулируемым электроприводом является низкая надежность и низкое быстродействие элёктро- ,привода. Низкая надежность устройства определяется тем, что момент переключения пороговых устройств при смене полярности входного сигнала не синхро- низирован с работой йнверторного мосчс преобразователя частотно-регулируемого электропривода, т. е. изменение направления счета кольцевого распределителя, которое определяется выходными сигналами пороговых устройств, происходит произвольно во времени и не синхронизировано с работой йнверторного моста пре образователя частотно-регулируемого электропривода. Цель изобретения - повышение надежности частотно-регулируемого электропри вода и сокращение времени реверса. Поставленная цель достигается тем, что в устрвйство для управления частотно-регулируемым электроприводом с асин хронным двигателем, содержащее преобразователь частоты, подключенный к асинх{эонному двигателю, включающий соединен ные между собой автономный инвертор, узел коммутации и регулируемый источни с фильтром, блоки регулирования частоты и напряжения, выходы которых подключены к преобразователю частоты, датчик частоты вращения, цепь, состоящую из последовательно включенных двух усилителей, блока выбора полярности аналогового сигнала, задатчик интенсивности, вы ход которого связан со входами блоков регулирования частоты и напряжения, пороговое устройство, введены датчик коммутации, схема И, нуль-орган, первый вход схемы И через нуль-орган соединен с выходом одного из усилителей, второй вход схемы И через датчик коммутации связан с преобразователем частоты, третий вход схемы И соединен с управляющим входом блока выбора полярности ана логового сигаала и через датчик частоты вращения связан с асинхронным двигателем, а выход схемы И через пороговый элемент соединен с двумя выходами блока регулирования частоты. 94 На фиг. 1 представлена схема устройства для управления частотно-регулируемым электроприводом; на фиг. 2 - диаграммы работы устройства. Тиристоры 1,2,3,4,5 и 6 образуют инверторный мост, входящий в преобразователь 7 частоты. К вьшодам переменного тока инверторйого моста подключен узел 8 коммутации и двигатель 9 переменного тока, а к выводам постоянного тока йнверторного моста подключен регулируемый источник (выпрямитель) 10 и фильтр 11. Преобразователь 7 частоты может быть дополнен также другими злементами, например, мостом обратных диодов . в. случае выполнения преобразователя частоты по схеме инвертора напряжения. Управление частотой и напряжением преобразователи 7 осуществляется с по- мощью блоков 12 и 13 регулирования частоты и напряжения, управляющие входы которых соединены с цепью, образованной последовательно включенными усилителями 14 и 15, .блоком 16 выбора. полярности аналогового сигнала, задатчи- ком 17 интенсивности. Ко входам блока управления частотой под1шючены выходы порогового элемента 18, управляющий вход которого соединен со выходом .схемы 19 И, Первый вход схемы И через нуль-орган 20 соединен с выходом усилителя 14 , второй вход схемы И через датчик 21 коммутации преобразователя связан с преобразователем 7 частоты, а третий вход схемы И через датчик 22 частоты вращения связан с двигателем 9 переменного тока. Устройство для управления частотно- .регулируемым электроприводом работает следующим образом. С подачей отрицательного сигнала управления Up/ на вход усилителя 14 напряжение на его выходе изменя.ет свой знак (усилитель пропорциональный инвертирующий) и меняется по закону изменения входного сигнала. Усилитель 15 также изменяет знак входного сигнала. Устройство 1.6 выбора полярности аналогового сигнала выполнено управляемым и пропускает на вход задатчика интенсивности только одну (положительную) полярность сигнала. С момента появления сигнала задания на торможение и до момента окончания торможения до заданного значения скорости, сигнал с выхода устройства выбора полярности равен нулю. Это достигается связью с выхода устройства выбора полярности. ПЬсле подачи сигнала на разгон двнг теля (момент i, ., I двигатель разгоняется до значения скорости, которое определяется входным сигналом Ug (момент В момент tg полярность сигнала на де изменяется скачкообразно с отрицате ной на положительную. Напряжение на выходе устройства выбора полярности становится равным нулю, а напряжение на выходе задатчика интенсивности спадает с заданным темпом. Одновремен-иб в момент i. 3 нуль-орган 20 меняет зна и на выходе элемента И появляется первый разрешающий сигнал для реверсирования кольцевого распределителя инвер-тора. При снижении частоты двигателя до частоты, равной частоте скольжения (приблизительно 0,5-1,0 Гц) на третьем выходе схемы 19 И появляется второй разрешающий сигнал. В момент появления третьего разрешающего сигнала на втором входе схемы И (момент t ), т. е. сигнала об отсутствии . коммутации в схеме инвертора сигналы на выходах А и Б порогового устройства 18 изме няются. На выходе А сигнал становится равным О, а на выходе Б - равным 1, происходит реверс кольцевого распредели теля и двигатель начинает разгоняться в другую сторону до значения скорости, за данного входным сигналом. Указанные процессы изображены на фиг. 2. В случае применения в качестве измерителя скорости тахогенератора, диаграмма скорости U будет Иметь вид, показанный на чертеже, в случае косвенного измерения скорости (например, с помощью датчика ЭДС) вид диаграммы будет отличаться от.приведенной. Такое выполнение устройства повышает надежность работы частотно-регулируемого электропривода за счет исключения реверса кольцевого распределителя с момента начала выключения предыдущего по счету тиристора инвертора до момента включения следующего по счету тиристора инвертора, т. е. во время коммутации, так как введенное устройство отсутствия коммутации в инверторе блокирует реверс кольцевого распределителя в течение указанного времени. В качестве указанного устройства отсутствия коммутации возможно использовать зада ющий генератор преобразователя частоты 7 996 либо специальные датчики, установленные в инверторе. Введение связи между третьим входом схемы И управляющим входом устройства выбора полярности и выходом устройства измерения скорости исключает реверс кольцевого распределителя на частотах, отличных от заданной частоты скольжения асинхронного двигателя, т. е. исключает торможение частотно-регулируемого электропривода противовключением и, таким образом, сокращает его время торможения, т. е. повышает его быстродействие. Формула изобретения Устройство для управления частотнорегулируемым электроприводом с асинхронным двигателем, содержащее преобразователь частоты, подключенный к асинхронному двигателю, включающий соединенные между собой автономный инвертор, узел коммутации, регулируемый источник с фильтром, блоки регулирования частоты и напряжения, выходы которых подключены к преобразователю частоты, датчик частоты вращения, цепь, составленную из последовательно соединенных двух усилителей, блока выбора полярности аналогового сигнала, задатчика интенсивности, выход которого связан со входами блоков регулирования частоты и напряжения преобразователя, пороговый элемент, отличающееся тем, что, с целью повышения надежности и быстродействия электропривода, в него введены датчик коммутации, схема И, нуль-орган, первый вход схемы И через нуль-орган соединен с выходом одного из усилителей, второй вход схемы И через датчик коммутации связан с преобразователем частоты, третий вход схемы И соединен G управляющим входом блока выбора полярности аналогового сигнала и через датчик частоты вращения связан с асинхронным двигателем, а выход схемы И через пороговый элемент соединен с блоком регулирования частоты. Источники информации, принятые во внимание при экспертизе 1.Преобразователь ТПЧ-4О, У 16.529.427-7О. 2.Авторское свидетельство СССР 499642, кл. И О2 Р 7/42, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реверса асинхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU970620A1 |
| Преобразователь частоты для частотно-регулируемого электропривода | 1979 |
|
SU888321A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для реверса асинхронного частотно-регулируемого электродвигателя | 1983 |
|
SU1418881A1 |
| Частотно-регулируемый электропривод | 1977 |
|
SU748751A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| Частотно-регулируемый электропривод с экскаваторной характеристикой | 1979 |
|
SU904176A2 |
| Способ устранения автоколебаний асинхронного двигателя | 1974 |
|
SU532167A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
1
t%
«
A
.1,
)
id
