Изобретение относится к области транспортных средств и электротехнике и может применяться для управления электро-дифференциалами на основе электрических синхронных двигателей [H02K 1/32, H02K 9/19, H02K 9/22].
В настоящее время в связи повышением требований к эксплуатационным показателям многоосных колесных машин, такими как подвижность, быстроходность, проходимость разработчики таких машин все чаще применяют новые конструктивные, технологические и схемные решения, призванные обеспечить выполнение указанных требований. В конструкциях упомянутых машин начинают использовать гидро- и электромеханические, гидрообъемные, дифференциальные комбинированные трансмиссии, позволяющие использовать гибкие алгоритмы управления тяговым моментом, подводимым к ведущим колесам [Шухман С.Б., Бахмутов С.В., Маляревич В.Э. Силовой привод колес полноприводного автомобиля с автоматической системой // МГТУ «МАМИ», ОАО «НАМИ-Сервис»].
Оптимизация параметров при выборе схем раздачи мощности по колесам для автомобилей различной колесной формулы и назначения важна не только в аспекте обеспечения необходимых тягово-динамических свойств, но и для соблюдения экологических требований. Таким образом, разработка закона управления индивидуальным приводом колес для транспортных средств различной колесной формулы с целью повышения энергоэффективности мотор-колес, является важной научной и практической задачей.
При формировании принципов распределения мощности по колесам, как правило, используют следующие основные подходы: обеспечение равенства крутящих моментов в приводах всех колес (полностью дифференциальная трансмиссия, активная и/или открытая), равенство частот вращения всех ведущих колес (полностью блокированная трансмиссия), равенство мощностей.
Дифференциал (от лат. differentia - разность, различие) - механизм в составе трансмиссий транспортных и (реже) технологических машин по передаче мощности посредством перемещения с одновременным делением единого потока мощности на два дифференциально связанных и/или суммированием двух независимых потоков мощности в один [Горелов В.А., Котиев Г.О., Мирошниченко А.В. Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 12. Режим доступа: http://technomag.edu.ru/doc/282533.html, опубл.: 01.04.2014].
Особенность электро-дифференциала и смысл его термина в том, что деление/суммирование потоков мощности каждого мотор-колеса движущегося объекта (транспортное средство) производится именно дифференциально. То есть каждый из двух исходящих/входящих потоков мощности может в любое время получать/давать от 0 до 100 % движущей мощности относительно единого источника электрической энергии на входе/выходе (с поправкой на КПД дифференциала).
В электро-дифференциалах соотношение этих мощностей и моментов между собой может быть любое в пределах этих 100 %. В отличие от движущей мощности и угловой (линейной) скорости перемещения движущий момент, электро-дифференциалом, делится жестко и неизменно.
Автоматизация программного управления электро-дифференциалом заключается в автоматическом пуске, останове, изменении скорости и реверсировании линейных электрических синхронных двигателей мотор-колес с требуемой последовательностью. Автоматизация программного импульсного и дискретного управления часто сопровождается блокировкой, не допускающей неправильных операций. Автоматизация инженерного дискретного процесса приводит к его значительному ускорению, улучшению качества переходных процессов электропривода, сокращению потребности в дополнительных настройках, уменьшению затрат умственного труда и его облегчение операторам.
Из уровня техники известен ИНДУКТОР СИНХРОННОГО ДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ [RU201583 U1, опубл.: 22.12.2020], содержащий магнитопровод ротора с постоянными магнитами и индуктор с катушками, образующие в совокупности трехфазный индуктор синхронного двигателя, отличающийся тем, что в индукторе смонтированы тепловые трубки с теплоотводящей жидкостью, торцы упомянутых трубок выполнены выступающими из индуктора, к поверхности индуктора над выступающими торцами тепловых трубок смонтирована теплоотводящая пластина с излучающими тепло ребрами.
Недостатком аналога является отсутствие эффективного устойчивого управления электромагнитными и механическими характеристиками индуктора синхронного двигателя с постоянными магнитами.
Также известен СПОСОБ ОГРАНИЧЕНИЯ ВИХРЕВЫХ ТОКОВ В РАЗОМКНУТОМ МАГНИТОПРОВОДЕ ИНДУКТОРА С 3-Х ФАЗНОЙ ОБМОТКОЙ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ [RU2692750 C2, опубл.: 27.06.2019], фазы которых сдвинуты в пространстве, а синусоиды напряжения источника питания сдвинуты во времени, отличающийся тем, что при подходе волны движущегося суммарного максимума магнитных потоков трех фаз к краю разомкнутого магнитопровода обмотки индуктора размыкают электрическую схему соединений обмоток передним фронтом волны максимума, а задним фронтом волны максимума замыкают схему электрических соединений, причем процесс повторяют периодически с каждой новой волной этого максимума. При схеме соединений обмоток «звезда» устройства в двух фазах обмотки индуктора, а при схеме соединений обмоток «треугольник» в каждой фазе установлены двухсторонние электронные ключи, к входам управления каждого из которых подключен выход электронного сумматора, один из входов которого соединен с выходом блока ограничения, а один из двух других входов через нормально открытый блок-контакт магнитного пускателя направления движения «вперед» сумматора соединен с выходом магнитного датчика Холла «вперед», а другой вход сумматора через нормально открытый блок-контакт магнитного пускателя направления движения «назад» соединен с выходом магнитного датчика Холла «назад», причем магнитные датчики Холла устанавливают: один - на одном краю разомкнутого магнитопровода, а другой магнитный датчик Холла - на противоположном краю разомкнутого магнитопровода.
Недостатком аналога является отсутствие возможности устойчивого управления электромагнитными, механическими и угловыми характеристиками индуктора синхронного двигателя с постоянными магнитами.
Наиболее близким по технической сущности является СПОСОБ СОЗДАНИЯ ДВИЖУЩЕГО МОМЕНТА В КОЛЕСЕ ТРАНСПОРТНОГО СРЕДСТВА ГРУЗОПОДЪЕМНОСТЬЮ ОТ 170 ТОНН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ [RU 2667208 C2, опубл.: 17.09.2018], отличающийся тем, что внутри ступицы колеса размещают непрерывно друг за другом на неподвижном несущем цилиндре не связные между собой первичные элементы - индукторы, имеющие разомкнутые изогнутые магнитопроводы с 3-х фазными обмотками, подключенными к источнику переменного тока регулируемой частоты напряжения, а вторичные элементы, не связные между собой общим магнитопроводом, закрепляют непрерывно друг за другом на подвижной ступице так, что пары индуктор - вторичный элемент образуют в объеме ступицы секторы, число которых определяют по заданной скорости движения транспортного средства путем расчета соотношений между величинами: внешнего диаметра шины колеса, ширины ступицы, магнитодвижущей силы в движущем моменте и радиуса точки приложения магнитодвижущей силы исходя из возможности размещения в ступице всех элементов по заданной мощности электропривода с учетом увеличения объемов элементов из-за дополнительных потерь энергии от вихревых токов, магнитные поля индукторов в каждом секторе синхронизируют, а движущие моменты, создаваемые каждым индуктором через воздушный зазор во вторичном элементе секторов, суммируют.
Устройство, содержащее в подвеске колеса несущий цилиндр, на котором жестко закреплены круговая кассета с первичными элементами-индукторами и три кольца изолированных электрошин, а также размещены: два плотно посаженных роликовых подшипника с радиальными щитами, которые, соответственно, один - с левой, другой - с правой сторон жестко соединены со ступицей колеса, причем щит с внешней стороны ступицы имеет монтажное окно, расположенное против одного из индукторов, закрепленных на кассете соединением типа «ласточкин хвост» со скользящей посадкой, - два плотно посаженных опорношариковых подшипника с осевыми щитами, которые один - с левой, другой - с правой стороны фиксируют положение ступицы по оси несущего цилиндра колеса, а из полости цилиндра подвески через технологические отверстия в цилиндре подвески и несущем цилиндре, а также разрыве между верхними индукторами установлен фиксатор-шток для удержания ступицы в горизонтальном положении при раскреплении радиального щита с монтажным окном со ступицей, через вторые технологические отверстия цилиндра подвески и несущего цилиндра введены провода от источника питания к кольцевым шинам, к которым подсоединены выводы обмоток индукторов, отличающееся тем, что в качестве вторичных элементов на внутренней поверхности ступицы закреплены намагниченные пластины с радиальным направлением магнитного поля, кривизна поверхности которых в каждом секторе соответствует кривизне магнитопроводов индукторов, обеспечивающей равномерность воздушного зазора между поверхностями первичных и вторичных элементов, причем вторичные элементы образуют общий составной цилиндр.
Основной технической проблемой прототипа является отсутствие возможности устойчивого управления электромагнитными, механическими и угловыми характеристиками индуктора синхронного двигателя с постоянными магнитами. Это связано со сложностью конструкции, сравнительно малым использованием полюсного деления ротора, несинусоидальным распределением магнитного поля индуктора на внутренней стороне ротора, что в итоге ограничивает функциональные возможности электропривода транспортного средства.
Задачей изобретения является устранение недостатков прототипа и расширение функциональных возможностей транспортного средства, повышение механической жесткости и устойчивости характеристик электропривода транспортного средства.
Технический результат изобретения заключается в повышении удельных энергетических характеристик электропривода транспортного средства, таких как полезной мощности, механического движущего момента мотор-колеса, коэффициента мощности, КПД при снижении массогабаритных показателей электропривода транспортного средства.
Указанный технический результат достигается за счет того, что способ управления активными электро-дифференциалами транспортного средства, отличающийся тем, что изменение и дискретное управление величиной мощности и движущего момента ротора в каждом мотор-колесе осуществляют изменением электромагнитного режима линейных синхронных двигателей, расположенных в плоскости каждого мотор-колеса относительно центральной оси его перемещения перераспределением сигналов управления, подаваемых на группы индукторов линейных синхронных двигателей мотор-колес и переключением режимов электро-дифференциалов с помощью дискретного управления переключением комбинаций трехфазных магнитных контакторов матрицы коммутаторов и трехфазных индукторов линейных синхронных двигателей соответствующих мотор-колес транспортного средства и дискретным соединением трехфазных обмоток индукторов последовательно в треугольник и/или каждый в независимую звезду для каждого из мотор-колес; при этом для формирования угловых характеристик линейных синхронных двигателей программное управление и регулирование электромагнитных активных режимов в индукторах осуществляют с помощью быстродействующих электронных ключей, а изменение активных режимов электро-дифференциалов осуществляют импульсным и фазово-импульсным способами; при импульсном способе включением и отключением индукторов изменяют скорость и мощность мотор-колеса, а при фазово-импульсном по начальному и конечному фронтам, получаемых от датчиков положения ротора изменяют величины механических и угловых характеристик движущего момента ротора линейного синхронного двигателя в мотор-колесе.
В частности, в качестве режимов электро-дифференциалов выбирают электро-дифференциал межколесной пары, межбортовой электро-дифференциал и электро-дифференциал межосевой пары.
В частности, реализация режима работы электро-дифференциала межколесной пары осуществляется включением трехфазных обмоток индукторов линейного синхронного двигателя одного мотор-колеса последовательно с трехфазными обмотками индукторов линейных синхронных двигателей второго мотор-колеса этой же оси;
В частности, отличающийся тем, что реализация режима работы межбортового электро-дифференциала осуществляется включением трехфазных обмоток индукторов линейного синхронного двигателя мотор-колеса одной оси последовательно с трехфазными обмотками индукторов линейного синхронного двигателя мотор-колеса другой оси;
В частности, отличающийся тем, что реализация режима работы электро-дифференциала межосевой пары осуществляется включением трехфазных обмоток индукторов линейных синхронных двигателей мотор-колес одной оси последовательно с трехфазными обмотками индукторов линейных синхронных двигателей мотор-колес другой оси.
Краткое описание чертежей.
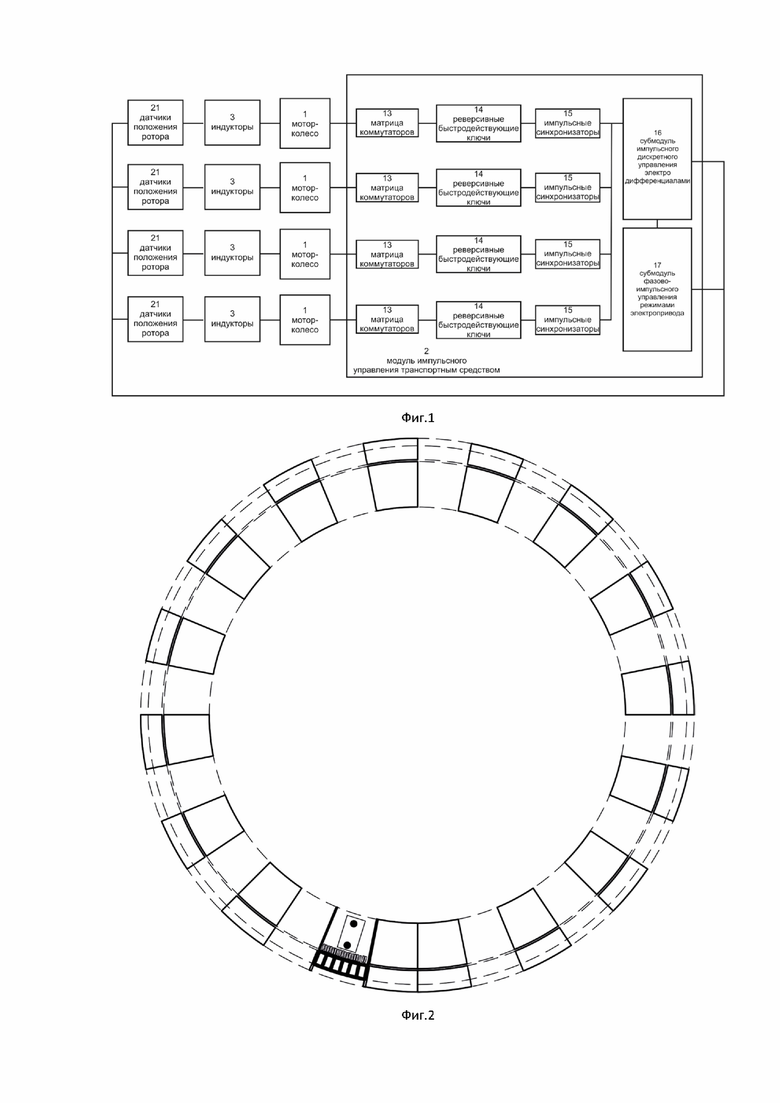
На фиг.1 показана блок-схема способа управления электро-дифференциалами транспортного средства.
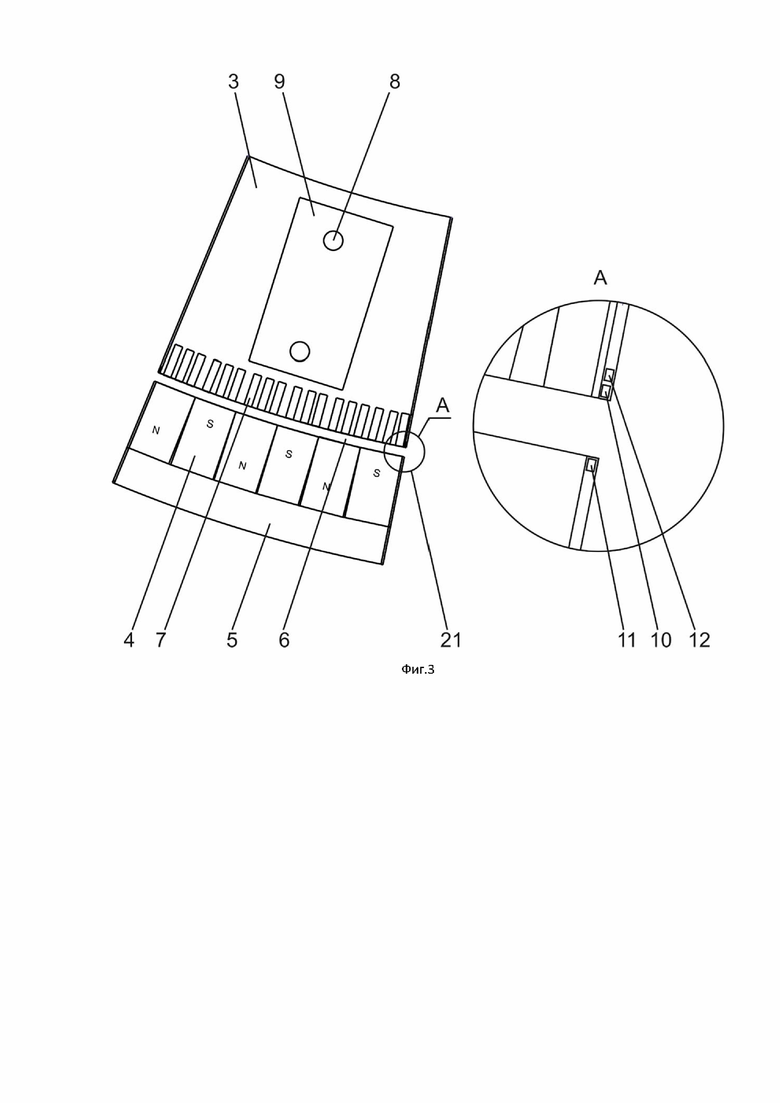
На фиг.2 схематично показан (один из 32-х) линейный синхронный двигатель в мотор-колесе транспортного средства.
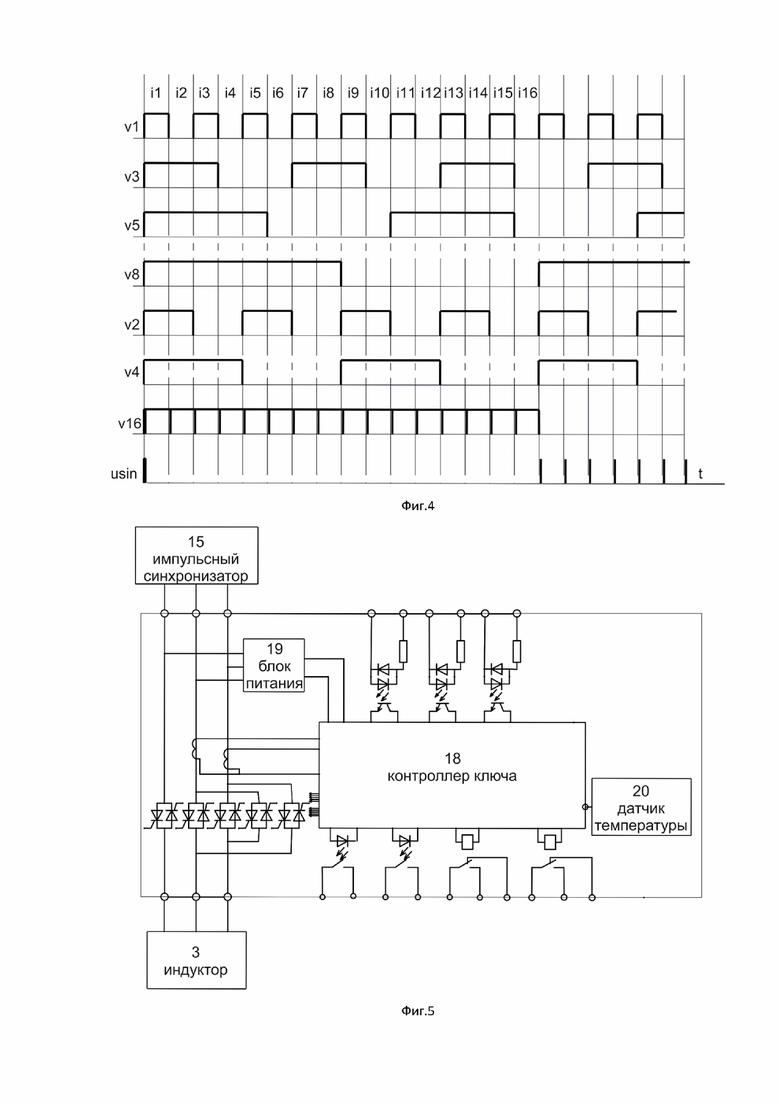
На фиг.3 схематично показан индуктор линейного синхронного двигателя мотор-колеса транспортного средства.
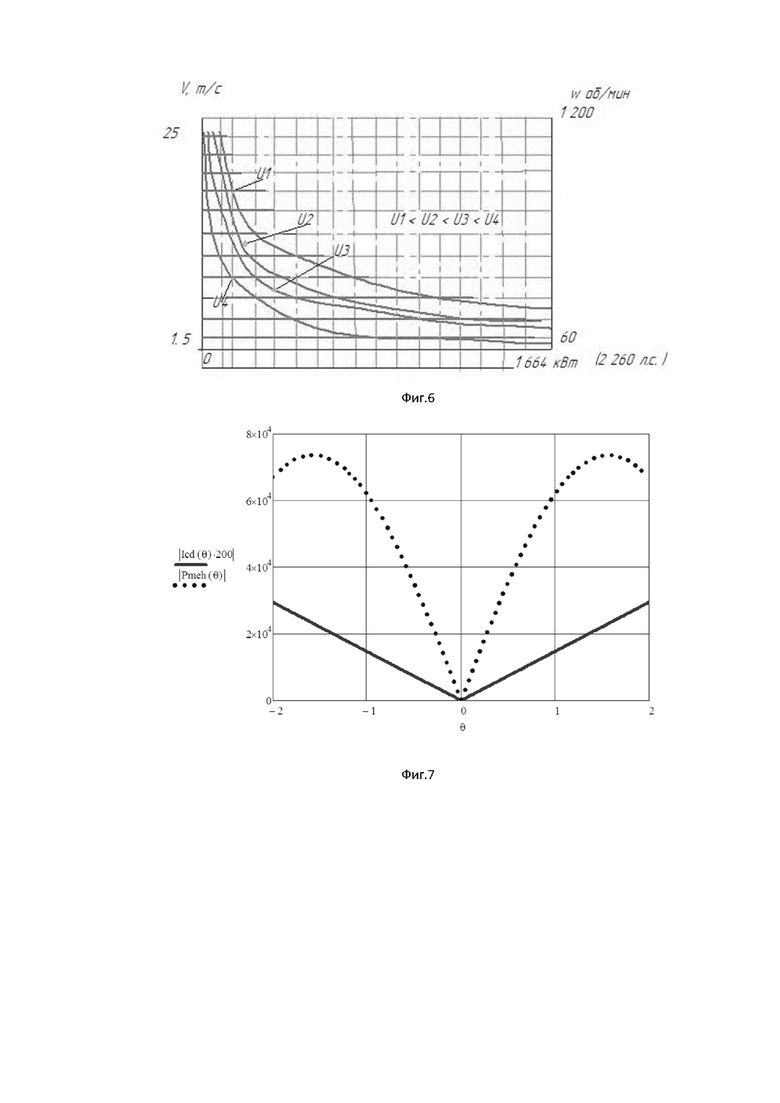
На фиг.4 показана временная диаграмма управления функционирования парных индукторов линейных синхронных двигателей мотор-колеса.
На фиг.5 схематично показан реверсный быстродействующий ключ управления индуктором линейного синхронного двигателя мотор-колеса транспортного средства.
На фиг.6 показан график зависимости механических и скоростных обобщенных характеристик электропривода транспортного средства.
На фиг. 7 показаны графики изменения движущей мощности индуктора (пунктирная линия) и тока от угла -1.57< Q<1.57 между векторами магнитных потоков ротора и индуктора.
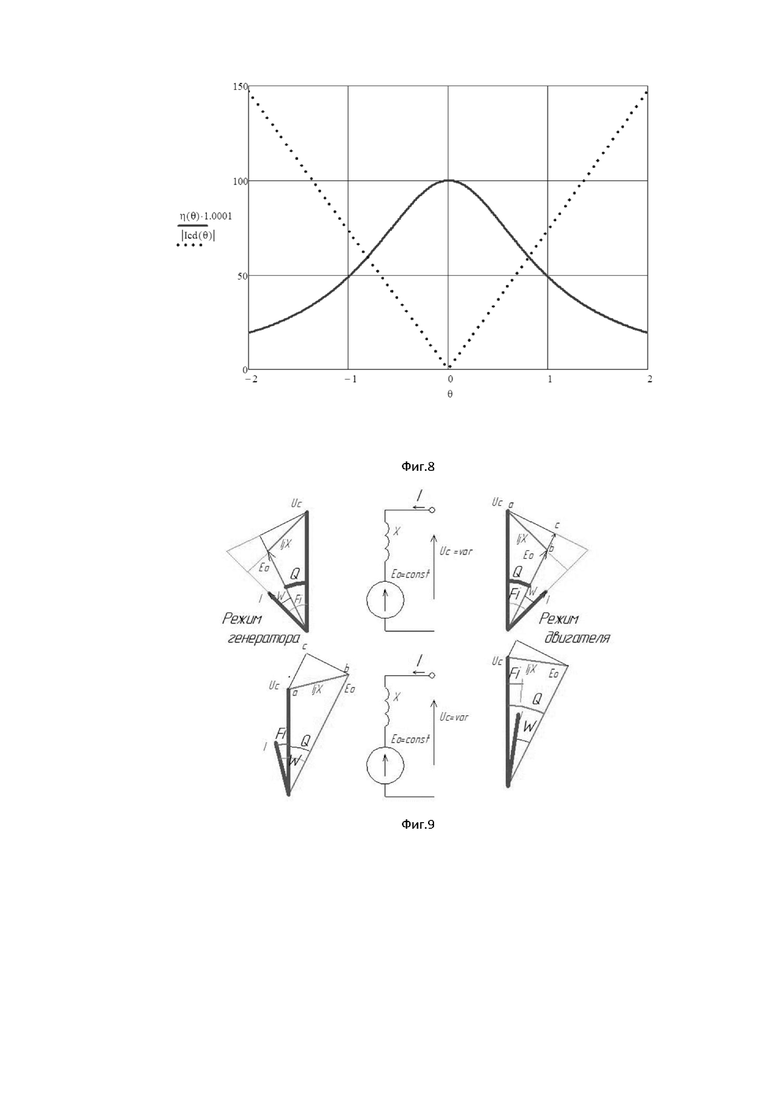
На фиг. 8 показаны графики изменения КПД (сплошная линия) и фазного тока линейного синхронного двигателя от угла -1.57< Q<1.57 между векторами магнитных потоков ротора и индуктора.
На фиг.9 показаны электрические режимы линейного синхронного двигателя.
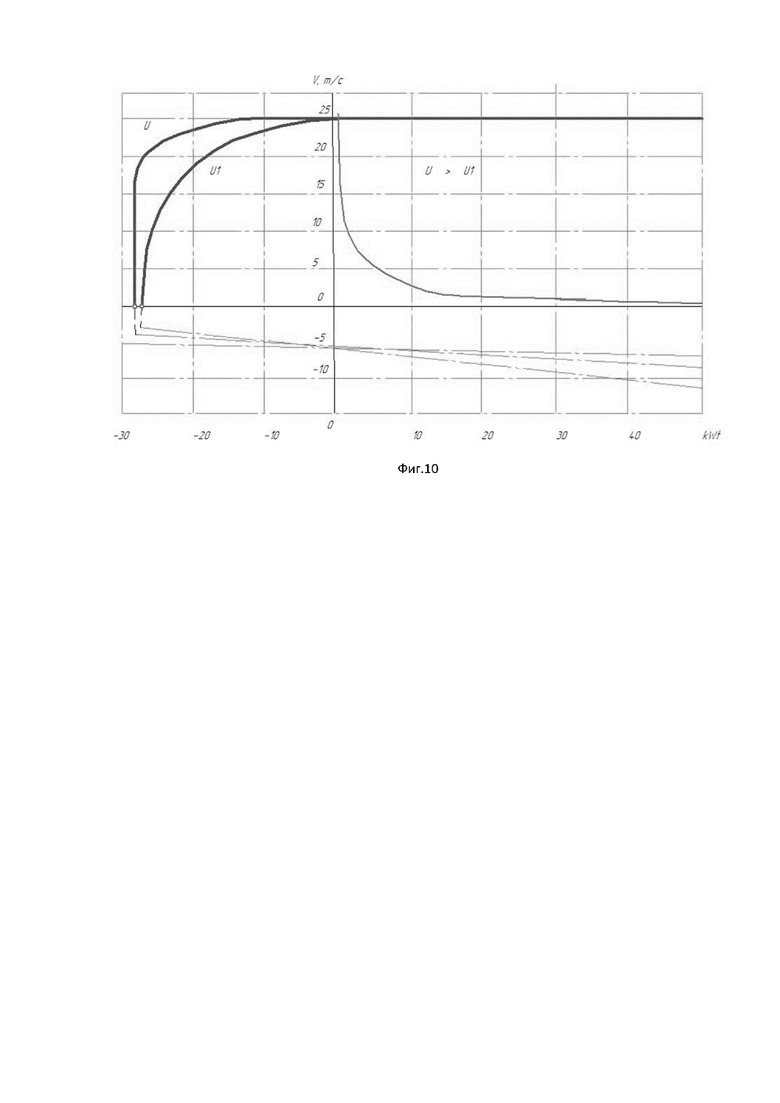
На фиг.10 показаны динамические характеристики торможения линейного синхронного двигателя с постоянными магнитами для пары (1 и 17) индукторов.
На фигурах обозначено: 1 - мотор-колесо, 2 - модуль импульсного управления транспортным средством, 3 - индукторы, 4 - постоянные магниты, 5 - магнитопровод ротора, 6 - зазор, 7 - зубцы, 8 - тепловые трубки, 9 - теплоотвод, 10 - датчик Холла, 11 - магнит, 12 - фотоэлектрический датчик, 13 - матрицы коммутаторов, 14 - реверсивные быстродействующие ключи, 15 - импульсные синхронизаторы, 16 - субмодуль импульсного и дискретного управления электро-дифференциалами, 17 - субмодуль фазово-импульсного управления режимами электропривода, 18 - контроллер ключа, 19 - блок питания системы управления, 20 - датчик температуры, 21 - датчики положения ротора.
Осуществление изобретения.
Способ управления электро-дифференциалами предназначена для сохранения эффективной устойчивой работы при движении транспортного средства на плоскости и включает межколесный, и/или межосевой, или межбортовой электро-дифференциалы (на фигурах не показаны), при этом упомянутые электро-дифференциалы выполнены в виде открытого электро-дифференциала и/или активного электро-дифференциала.
Способ управления электро-дифференциалами транспортного средства заключается в перераспределении энергии мощности от электрического источника для создания движущих моментов на одном или нескольких мотор-колесах 1 транспортного средства.
Для реализации способа транспортное средство включает в себя, по крайней мере, пару осей с мотор-колесами 1 (см.Фиг.1), по два мотор-колеса 1 на каждой из осей и модуль импульсного 13 и дискретного 14 управления транспортным средством 2. Каждая из пар осей мотор-колес 1 образует межколесный электрический дифференциал с возможностями открытым, а также активным импульсными и дискретными способами управления в мотор-колесе 1 электромагнитными средствами по парам линейных синхронных двигателей 3.
В предлагаемом изобретении каждое из мотор-колес 1 транспортного средства содержит линейный синхронный двигатель (см.Фиг.2), состоящий из четного числа трехфазных индукторов 3 с постоянными магнитами 4 (см.Фиг.3) на секторах ротора линейного синхронного двигателя. Линейный синхронный двигатель содержит магнитопровод ротора 5 со смонтированными на нем постоянными магнитами 4 и индукторами 3, образующие в совокупности трехфазные парные индукторы синхронного двигателя. Между индуктором 3 и магнитопроводом ротора 5 выполнен зазор 6. Фазы индуктора 3 образованы катушками, размещенными в разных параллельных плоскостях, причем пазы, образованные между зубцами 7 в которых размещены проводники катушки одной фазы, охватывающие упомянутые зубцы 7 чередуются с пазами, в которых размещены проводники катушки другой фазы, и секции обмотки разных фаз чередуются по высоте. Для образования переменно полярного возбуждения (N, S, N, S, N..., S) по отношению к катушкам индуктора 3 постоянные магниты 4 установлены в соответствии с его полюсами.
В индукторе 3 (RU201583 U1, RU2692750 C2, RU 2667208 C2) выполнены отверстия, в которые смонтированы тепловые трубки 8, выполненные в виде герметично закрытых трубок из теплопроводящего металла, например, меди, при этом торцы тепловых трубок 8 выступают наружу. Внутреннее покрытие тепловых трубок 8 выполнено пористым. Упомянутые трубки 8 заполнены легкокипящая жидкость. На выступающие торцы тепловых трубок 8 смонтирован теплоотвод 9, опирающийся своей поверхностью на поверхность индуктора 9, при этом теплоотвод 8 смонтирован на теплоотводящий состав, выполненный в виде, например, термопасты. Теплоотвод 9 выполнен в виде металлической пластины на поверхности которой ортогонально смонтированы теплоотводящие ребра (на фигурах не показаны). Для получения и контроля синхронного режима линейного синхронного двигателя установлена система положения 21 ротора 5 относительно индуктора 3.
По фронтам постоянных магнитов 4 и зубцов 7 ротора каждого из индукторов 3 линейного синхронного двигателя вдоль зазора 6 смонтированы датчики положения ротора 21, содержащие датчик Холла 10, ответная часть которого выполнена в виде магнита 11, постоянное магнитное поле которого воздействует на датчик Холла 10, и фотоэлектрический датчик 12. При этом магнит 11 смонтирован на магнитопроводе ротора 5, а датчик Холла 10 и фотоэлектрический датчик 12 смонтированы на индукторе 3 соответственно в начале и в конце полюсного деления магнитопровода индуктора 3 линейного синхронного двигателя. (RU201583 U1, RU2692750 C2, RU 2667208 C2)
Принцип работы линейного синхронного двигателя основан на взаимодействии бегущего магнитного поля, созданного током, протекающим в обмотках индуктора 3 и постоянного магнитного поля магнитопровода ротора 5.
Магнитное поле магнитопровода ротора 5, взаимодействуя с синхронным переменным током, протекающим в обмотках индуктора 3, создает движущий, крутящий момент подвижного магнитопровода ротора 5 относительно неподвижного индуктора 3.
В одном из вариантов (RU201583 U1, RU2692750 C2, RU 2667208 C2) реализации настоящего изобретения каждое мотор-колесо 1 содержит линейный синхронный двигатель, состоящий из 16 пар индукторов 3 с активной мощностью каждого индуктора 3 Рсд=52 кВт. Напряжение питания трехфазное, 220 В, номинальная частота 50 Гц. Все индукторы 3 размещены по образующей радиусом Rp, где Rр - радиус ротора мотор-колеса 1. Каждая из пар индукторов 3 создает в роторе движущий момент импульса силы:
М= 2Rp⋅Fир,
где Fир - сила тока в обмотке индуктора 3, действующая на элементы каждого сектора подвижного ротора в постоянном магнитном поле.
То есть, имеет место взаимодействие в секторах линейного синхронного двигателя вектора магнитного потока от постоянного магнитного поля ротора Фр и бегущего результирующего вектора Фир, движущего в воздушном зазоре 6 линейного синхронного двигателя, созданного токами трехфазной обмотки неподвижного индуктора 3:
M=k×Фр⋅Фир⋅sin(Фр/Фир),
где k - конструктивный коэффициент пропорциональности момента импульса силы М произведению потоков ротора и статора.
Движущий момент Нм линейного синхронного двигателя (фиг. 7) в генераторном (-) и двигательном (+) режимах изменяется пропорционально от угла -1.57< Q<1.57 между векторами магнитных потоков ротора и индуктора 3 линейного синхронного двигателя и/или угла между векторами ЭДС и напряжения, подведенного к индуктору 3.
Модуль импульсного управления транспортным средством 2 включает последовательно подключенные к линейным синхронным двигателям мотор-колес 1 матрицу коммутаторов 13 (см.Фиг.1), состоящую из вакуумных магнитных контакторов, реверсивные быстродействующие ключи 14, выполненные 3-х фазными, импульсные синхронизаторы 15 линейных синхронных двигателей, субмодуль импульсного дискретного управления электро-дифференциалами 16 и субмодуль фазово-импульсного управления режимами электропривода 17.
Каждый из магнитных контакторов матрицы коммутаторов 13 подключен своим управляющим выходом к каждому из индукторов 3, а к управляющему входу каждого из магнитных контакторов матрицы коммутаторов 13 подключен своим управляющим выходом реверсивный быстродействующий ключ 14 (см.Фиг.4). Количество упомянутых ключей 14, также, как и магнитных контакторов, выполнено по количеству индукторов 3 в линейном синхронном двигателе мотор-колеса 1. Реверсивный быстродействующий ключ 14 выполнен с возможностью управления контроллером ключа 18, питание которого выполнено от блока питания 19. К контроллеру ключа 18 подключен датчик температуры 20.
Реверсивные быстродействующие ключи 14 линейного синхронного двигателя каждого из мотор-колеса 1 подключены к импульсным синхронизаторам 15, выполненным с возможностью контроля и управления комплектом датчиков положения роторов 21, которые в свою очередь подключены к субмодулю импульсного дискретного управления электро-дифференциалами 16 межколесными, и/или межосевыми, и/или способами управления электронными средствами линейных синхронных двигателей и мотор-колес 1 в транспортном средстве.
Субмодуль импульсного дискретного управления электро-дифференциалами 16 выполнен с возможностью распределения движущих моментов между мотор-колесами 1 транспортного средства и подключен к субмодулю фазово-импульсными способами управления режимами электропривода 17 мотор-колес 1, выполненным с возможностью контроля и управления датчиками положения роторов 21.
В основе способа управления электро-дифференциалами транспортного средства используются дискретные схемы с логическими методами формирования синхронных импульсов и цифровыми инженерными способами управления и регулирования. Сущность способа которого заключается в последовательном включении определенного числа пар индукторов 3 линейного синхронного двигателя в мотор-колесе 1 в зависимости от активного режима работы электро-дифференциалов в соответствии с алгоритмом управления мотор-колесом 1 для сохранения устойчивого положения транспортного средства и создания гироскопического эффекта для момента импульса пар сил и момента относительно оси центра масс вращения ротора индукторов 3 линейного синхронного двигателя мотор-колеса 1. Иными словами, дискретные синхронные импульсы от реверсивных быстродействующих ключей 14 включают или отключают пары индукторы 3 синхронного линейного двигателя мотор-колеса 1 путем изменения электромагнитного активного режима пары индукторов 3, а также, включения и/или переключения соответствующих пар индукторов 3 линейного синхронного двигателя, расположенных в плоскости мотор-колеса 1 относительно центральной оси перемещения ротора индукторов 3 линейного синхронного двигателя, соответствующего мотор-колеса 1.
Логическое переключение импульсных и дискретных активных режимов электро-дифференциалов осуществляются с помощью управления матрицами коммутаторов 13.
На фиг.4 показана временная диаграмма функционирования групп индукторов 3 линейного синхронного двигателя одного мотор-колеса 1 с интервалом, кратным 3.3 мс (ось абсцисс), показывающая принцип управления электро-дифференциалами транспортного средства где v1-v16 - функция-число одновременно включенных и отключенных пар индукторов 3 в мотор-колесе 1 из 2Н попарно, при создании движущего момента мотор-колеса 1, а i1-i16 - одна из 2Н i-той пар индукторов 3 линейных синхронных двигателей в мотор-колесе 1.
При импульсном электронном включении и отключении i-той пар индукторов 3 с частотой управления в диапазоне от v1 до v16 изменяются скорость и мощность мотор-колеса 1, при этом при v16 скорость начала движения будет минимальная V=1.5 м/с, мощность пуска для каждого мотор-колеса 1 будет максимальная Рт= 2⋅16⋅Рсд= 1664 кВт, а при v1 движущая мощность транспортного средства РТ = 2⋅Рсд= 104 кВт будет минимальна для каждого мотор-колеса 1, а скорость движения транспортного средства V=25 м/с будет максимальна движения.
На фиг.5 показана схема реверсивного быстродействующего ключа 14, работа которым управляется с помощью контроллера ключа 18, выполненного в виде программируемой логической интегральной схемы, в которой управляющие сигналы от импульсного синхронизатора 15 преобразуются контроллером ключа 18 в 120 градусные импульсы управления быстродействующими ключами (тиристорами).
На фиг.6 показан график зависимости механических и скоростных обобщенных характеристик электропривода, соответствующие равномерной нагрузке одной оси открытого межколесного электро-дифференциала транспортного средства. Характеристики электропривода приведены при разных значениях подведенного к парам индукторов 3 линейных синхронных двигателей изменяемого сетевого напряжения, U1<U2<U3<U4 от реверсивных быстродействующих ключей 14, из сетевого трехфазного электроснабжения транспортного средства.
Контроль и управление величиной движущего момента и контроль моментов действующих нагрузок на мотор-колеса 1 осуществляют с помощью субмодуля фазово-импульсного управления режимами электропривода 17 к которому подключены датчики положения 21 ротора, состоящих, как было описано выше из датчиков Холла 10, ответных им магнитов 11 и фотоэлектрических датчиков 12, установленных в секциях на секторах каждого из индукторов 3 линейного синхронного двигателя (см.Фиг.3) каждого из мотор-колес 1.
С помощью импульсов по начальному (1ф) и конечному (2ф) фронтам, получаемых от упомянутых датчиков положения ротора 21 путем дискретной фиксации измерения угла между вектором магнитного потока подвижного ротора и движущего магнитного потока индуктора 3 неподвижного на станине транспортного средства для синхронного оптимального устойчивого режима линейных синхронных двигателей при пусках, ускорении, торможении и реверсах управляются трехфазными реверсивными электронными ключами 14.
В предлагаемом варианте реализации возможны следующие режимы работы:
в режиме межколесного дифференциала, когда одновременно включены два мотор-колеса 1 одной из осей транспортного средства, при этом установленная мощность транспортного средства Pуст = 2х2НхРсд, где Н - количество i-той пар индукторов. Для рассматриваемого варианта реализации с активной мощностью каждого индуктора Рсд=52 кВт, при Н=16, Руст= 3328 кВт;
в режиме межбортового дифференциала, когда одновременно включены два мотор-колеса 1 каждой из осей транспортного средства, расположенных вдоль одного борта транспортного средства, при этом установленная мощность транспортного средства Pуст = 2х2НхРсд, где Н - количество i-той пар индукторов. Для рассматриваемого варианта реализации с активной мощностью каждого индуктора Рсд=52 кВт, при Н=16, Руст= 3328 кВт;
в режиме межосевого дифференциала, когда одновременно включены все мотор-колеса 1 транспортного средства установленная мощность транспортного средства равна Pуст = 2х3328 = 6656 кВт.
Субмодуль импульсного дискретного управления электро-дифференциалами 16 с помощью реверсных быстродействующих ключей 14 позволяет с помощью программируемых алгоритмов и микропроцессорной схемы фазового управления вентилями:
- изменять величину подводимого к индукторам 3 линейных синхронных двигателей напряжения для изменения механических и угловых характеристик движущего момента ротора линейного синхронного двигателя в мотор-колесе 1 при движении транспортного средства;
- осуществлять контроль токов и напряжений в линейных синхронных двигателях, которые пропорциональны результирующему моменту, действующему на образование движущего момента каждого мотор-колеса 1.
Управление режимами «пуск», «реверс», «торможение» транспортным средством осуществляется регулированием рабочими характеристиками линейных синхронных двигателей мотор-колес 1. Для этого реализация активных режимов управления и регулирования в мотор-колесах 1 транспортного средства достигается изменением электрических параметров линейных синхронных двигателей по алгоритмам, приведенным в таблице 1, т.е. дискретной коммутацией групп i-той пар индукторов 3 линейных синхронных двигателей в мотор-колесе 1 транспортного средства по алгоритмам первой и второй строкам таблицы 1.
Приведенный в таблице 1 (наименования пар для включенной/отключенной i-той пары (1и17) индукторов 3, при опросе по диаграммам импульсов, фиг.4) режим соответствует активному управлению одной парой линейных синхронных двигателей при максимальной частоте опроса включения парных индукторов 3 (v1 на фиг.4).
Механические и скоростные характеристики электропривода мотор-колеса 1 формируются с использованием угловых характеристик M=f(Q) изменением напряжения и управлением по фронтам импульсов от датчиков положения ротора 21 в переходных процессах движения транспортного средства.
На фиг. 7 показаны графики изменения движущей мощности индуктора (пунктирная линия) и тока (сплошная линия) линейного синхронного двигателя в генераторном (-) и двигательном (+) режимах от угла между векторами магнитных потоков ротора и индуктора 3 линейного синхронного двигателя и/или угла между векторами ЭДС и напряжения питания индуктора 3 линейного синхронного двигателя.
На фиг. 8 показаны графики изменения КПД (сплошная линия) и фазного тока линейного синхронного двигателя (пунктирная линия) в зависимости от угла Q (-1.57< Q<1.57) управления между векторами магнитных потоков для достижения режимами генератор или двигатель и/или от угла управления между векторами ЭДС и напряжения питания индуктора линейного синхронного двигателя.
Распределение энергопотоков и управление в индукторах 3 линейных синхронных двигателях во всех режимах транспортного средства осуществляют следующим образом.
Ротор линейного синхронного двигателя от каждого мотор-колеса 1 сцеплен с поверхностью движения транспортного средства, потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля индуктора 3 линейного синхронного двигателя.
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; перемещаясь, он увлекает за собой ротор, создавая движущий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки при движении транспортного средства.
В двигательном режиме синхронная машина потребляет из сети ток I, который направлен навстречу ЭДС Eo (см.Фиг.9). Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора Uo = Eo + jXcинI показывает, что противо-ЭДС Ео и индуктивное падение напряжения jXсинII уравновешивают напряжение сети Uo (т.к. Xсин >>Ro, то, предполагается, что RoI=0).
Если рассмотреть векторную диаграмму линейного синхронного двигателя, то угол θ будет образовываться фазовым смещением ЭДС, наведенной в индукторной обмотке магнитным потоком от постоянных магнитов ротора и напряжения, приложенным к фазам индукторной обмотке.
В результате действия механической нагрузки Мс вектор магнитного потока ротора Ф0 отстает от вектора результирующего магнитного потока Фрез на угол Q. Поэтому в двигательном режиме вектор ЭДС Eo отстает по фазе на угол Q от вектора напряжения электрической сети Uo. Сопоставление векторных диаграмм линейного синхронного двигателя (см.Фиг. 11, режим двигателя) и линейного синхронного генератора (см.Фиг.11, режим генератора) показывает, что угол Q меняет свой знак (фиг.7 и фиг.8). При построении векторной диаграммы двигателя вектор Uo принимается за исходный.
Вектор тока I отстает по фазе на 90° от вектора jXсин.I.
Активная мощность, потребляемая трехфазным линейным синхронным двигателем (ЛСД) равна утроенной фазной мощности Pc=3×Uс×Ic×cos(U-I). Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из индуктора в ротор, Pmex = 3×E0
×I×cos(psi), где psi - угол сдвига фаз между током и ЭДС.
Из треугольников оса и асb векторной диаграммы следует, что отрезок ac = mUcsinθ = mXсинIcosψ, где m - масштабный коэффициент.
Подставляя значение Icosψ в выражение для Рэм, получаем выражение для определения механической мощности на каждый подключенный х-сектор линейного синхронного двигателя, ЛСД-х Рмех = Рэм = 3Е0Uсsinθ /Хсин = Pmaxsinθ.
Механический момент на роторе двигателя, ЛСД-х:
М = Рмех/Ω = 3Е0Uсsinθ / Ω Хсин = Мmaxsinθ.
где Ω = 2πn/60 - угловая скорость ротора, Мтах = 3Е0Uс/ΩХсин - максимальный момент, развиваемый электродвигателем (фиг.7 и фиг.8). При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0.
Например, для рассматриваемого в качестве примера реализации транспортного средства, возможный диапазон регулирования мощности и движущего момента в электроприводе мотор-колеса 1 при движении транспортного средства находится в пределах от Р1=104 кВт до Р2=3328 кВт с выбором использования вида режима: межколесного, межбортового или межосевого электро-дифференциала в транспортном средстве.
В каждом из описанных выше режимах работы электро-дифференциала - межколесном, межбортовом или межосевом способ управления электро-дифференциалами транспортного средства позволяет реализовать открытый или активный электро-дифференциал, представляющий собой перераспределение мощностей между линейными синхронными двигателями мотор-колес 1. Перераспределение осуществляются с помощью переключения комбинаций трехфазных вакуумных контакторов матрицы коммутаторов 13 и трехфазных i-той пары индукторов 3 линейных синхронных двигателей, соответствующих мотор-колес 1 транспортного средства путем дискретного соединения трехфазных обмоток с числом пар 2Н индукторов 3 последовательно в треугольник и/или каждый в независимую звезду для каждого мотор-колес 1.
Открытый электро-дифференциал межколесной пары, где трехфазные обмотки 2Н индукторов 3 линейных синхронных двигателей одного мотор-колеса 1 включены контактором матрицы коммутаторов 13 последовательно с трехфазными обмотками 2Н парных индукторов 3 линейных синхронных двигателей второго мотор-колеса 1 этой же оси.
Открытый межбортовой электро-дифференциал, где трехфазные обмотки 2Н i-той пары индукторов 3 линейного синхронного двигателя мотор-колеса 1 одной оси включены контактором матрицы коммутаторов 13 последовательно с трехфазными обмотками 2Н индукторов 3 линейного синхронного двигателя мотор-колеса 1 другой оси.
Открытый электро-дифференциал межосевой пары, где трехфазные обмотки 2Н i-той пары индукторов 3 линейных синхронных двигателей мотор-колес 1 одной оси включены контактором матрицы коммутаторов 13 последовательно с трехфазными обмотками 2Н индукторов 3 линейных синхронных двигателей мотор-колес 1 другой оси.
Способ управления и регулирования активных режимов электро-дифференциалов производится с помощью реверсивных быстродействующих ключей 14. Устойчивость управления электро-дифференциалов в дискретных режимах электропривода транспортного средства (пуск, останов, торможение, реверс) осуществляют также с помощью датчиков положения ротора 21 и субмодуля импульсного управления режимами электропривода 16.
На фиг. 10 показаны динамические характеристики торможения линейного синхронного двигателя с постоянными магнитами для пары 1 и 17 индукторов 3. Начало торможения мотор-колеса 1 осуществляется при минимальной движущей мощности 104 кВт, и максимальной скорости движения мотор-колеса 1 равной 25 м/с. Минимальная тормозная удерживающая мощность равна 28 кВт. Изменение тормозной мощности, пропорционально, постоянному току и напряжению, подключенного к двум фазам обмоток i-той пары индукторов 3, производится фазово-импульсным регулированием постоянного напряжения в фазных обмотках от реверсивного быстродействующего ключа 14, где упомянутый ключ 14 для динамического торможения переключается в трехфазный реверсивный каскад однополупериодного постоянного тока.
Технический результат изобретения - повышение удельных энергетических характеристик электропривода транспортного средства достигается за счет реализации управления величиной мощности и движущего момента линейных синхронных двигателей мотор-колес 1 транспортного средства, содержащих подвижный магнитопровод ротора 5 и неподвижные 2Н i-той пары индукторов 3 с трехфазными катушками с помощью модуля импульсного управления транспортным средством 2, путем изменения, управление величиной мощности и движущего момента подвижного ротора в каждом мотор-колесе 1 перераспределением логических синхронизирующих импульсных сигналов управления, подаваемые на определенные группы индукторов 3 на образующих мотор-колесах 1 частотно импульсными и фазоимпульсными синхронными методами по алгоритмам устойчивого сохранения нагрузок мощности и движущего момента, в соответствии с действующими нагрузками на каждое мотор-колесо с целью сохранения устойчивого положения транспортным средством в заданном программой управления состоянии его движения. Управление, изменение угловых скоростей роторов мотор-колес 1 и движущих моментов линейных синхронных двигателей в транспортном средстве осуществлены с помощью реверсивных быстродействующих ключей 14 за счет изменения электромагнитного режима парных индукторов 3, а также, включения и/или переключения соответствующих i-той пар 2Н индукторов 3 расположенных в плоскости мотор-колеса 1 относительно центральной оси его перемещения с использование моментов сил на секторы ротора 2Н парных индукторов 3 линейного синхронного двигателя соответствующего мотор колеса 1.
Логическое переключение режимов электро-дифференциалов осуществлено с помощью дискретного управления матрицей коммутаторов 13 и переключения комбинаций парных индукторов 3 последовательно под управлением субмодулем импульсного дискретного управления электро-дифференциалами 16, в треугольник и/или включения каждой обмотки индуктора 3 в независимую звезду под управлением субмодуля фазово-импульсного управления режимами электропривода.
Программное управление и регулирование электромагнитных активных режимов в парных индукторах 3, производится с помощью электронных реверсивных быстродействующих ключей 14 для формирования угловых характеристик линейных синхронных двигателей мотор-колес 1 в транспортном средстве ТС, при этом выбирают активный режим электропривода: пуск, останов, торможение, реверс.
Изменение активных режимов электропривода осуществляют дискретными электронными импульсами от датчиков положения ротора 21 и синхронизирующими импульсами от импульсных синхронизаторов 15 и реверсивных быстродействующих ключей 14 к индукторам 3 по угловым характеристикам движущего момента линейных синхронных двигателей заданного мотор-колеса 1.
Датчики положения ротора 21, включающие в себя фотоэлектрический датчик 12 и магнитный датчик Холла 10, уставленные на границах полюсного деления в каждом из 2Н секторов в мотор-колесе 1 из 2Н парных индукторов 3, соответственно в начале и в конце полюсного деления магнитопровода индуктора 3, синхронизируют электромагнитные режимы. Электронные импульсы от датчиков положения ротора 21 по начальному (1ф) и конечному (2ф) фронту использованы в способе управления трехфазными электронными реверсными быстродействующими ключами 14 для установления синхронного оптимального устойчивого режима линейного синхронного двигателя при дискретных управлениях: пусках, ускорении, торможении и реверсах с заданным движущим моментом мотор-колес в транспортном средстве.
Режимы электро-дифференциала дискретных способов управления электроприводом в осуществляются путем контроля трехфазных токов, углов векторов: магнитных потоков, напряжений в фазах линейных синхронных двигателей, и углового положения вектора магнитного потока ротора мотор-колес 1, и вектора магнитного потока индуктора линейных синхронных двигателей при пусках, ускорении, торможении и реверсах, для достижения результатов с заданным движущим моментом мотор-колес 1 в транспортном средстве.
Предложенный способ управления электро-дифференциалами транспортного средства и управления тяговым электроприводом ведущих осей, включающий в себя дискретное управление тяговыми и тормозными моментами на мотор-колесах 1, оценен методами имитационного математического моделирования по результатам которых подтверждена работоспособность предложенного дискретного способа управления, универсального способа управления электронными, дискретными, электромеханическими трансмиссиями, выполненными по схеме «электро-дифференциал - мотор-ось», сочетающего функции распределения мощности по мотор-колесам 1 в переходных движениях транспортного средства.
При дополнении способа управления программируемыми алгоритмами динамической стабилизации транспортного средства позволит повысить его курсовую и траекторную устойчивость.
Способ управления электро-дифференциалами транспортного средства предназначен для повышения устойчивости транспортного средства движения и/или положения воздушного, космического, морского, наземного корабля для динамического позиционирования.
За счет предложенных технических решений, синхронный двигатель с распределенными по обечайке ротора постоянными магнитами 4 и с автоматизированным пуском, торможением, после входа в синхронизм, будет иметь более устойчивую механическую характеристику, меньшее потребление энергии из сети в номинальном режиме работы, и переходных режимах работы электропривода транспортного средства, увеличенный коэффициент мощности, чем в прототипах.
Заявленное изобретение позволяет расширить функциональные возможности, увеличить использование полюсного деления, повысить механическую жесткость, а также повысить энергетические характеристики (полезную мощность, механический движущий момент, коэффициент мощности, КПД) при снижении массогабаритных показателей.
Технический результат достигается за счет того, что описанный способ позволяет осуществлять перераспределение от электрического источника энергии мощности и движущие моменты на определенные синхронные двигатели мотор-колес 1 с распределенными по образующей мотор-колес 1 четным числом парных индукторов 3 с постоянными магнитами 4 на роторе в соответствии с действующими нагрузками на каждое мотор-колесо 1 с целью сохранения устойчивого положения транспортного средства с помощью модуля импульсного управления транспортным средством 2.
Изменение и дискретное управление величиной мощности и движущего момента ротора в каждом мотор-колесе 1 осуществляется путем перераспределения логических синхронизирующих сигналов управления, подаваемые на определенные четные группы индукторов линейных синхронных двигателей распределенных на образующих мотор-колеса 1 частотно импульсными и фазоимпульсными синхронными методами по алгоритмам устойчивого сохранения нагрузок мощности и движущего момента линейного синхронного двигателя в соответствии с действующими нагрузками на каждое мотор-колесо 1 с целью сохранения устойчивого положения транспортного средства в заданном программой дискретного управления состоянии его движения.
Управление, изменение угловых скоростей роторов мотор-колес 1 и движущих моментов линейных синхронных двигателей транспортного средства осуществляют с помощью модуля импульсного управления 2 путем воздействия на электронною часть электро-дифференциала транспортного средства частотным, фазоимпульсным методами за счет изменения электромагнитного режима парных индукторов 3, а также, периодического включения и/или переключения соответствующих парных индукторов 3 с использованием моментов сил действующих на секторы ротора от парных индукторов 3 линейного синхронного двигателя соответствующего мотор-колеса 1.
Логическое переключение режимов электро-дифференциалов осуществляют с помощью дискретного управления в матрице коммутаторов 13 путем переключения комбинаций контакторов и трехфазных индукторов 3 путем программного соединения по выбранному дискретному алгоритму нагрузки за счет включения трехфазных обмоток индукторов последовательно, в треугольник и/или включения каждой обмотки индуктора 3 в независимую звезду.
Программное управление и регулирование электромагнитных активных режимов в индукторах 3, осуществляют с помощью реверсивных быстродействующих ключей 14, формирующих угловые характеристика линейных синхронных двигателей мотор-колес 1. при этом, выбирается активный режим электро-дифференциалов: пуск, останов, торможение, реверс.
Изменение активных режимов электро-дифференциалов осуществляется дискретными электронными импульсами от датчиков положения ротора 21 и синхронизирующими импульсами от субмодуля фазово-импульсного управления режимами электропривода 17 по угловым характеристикам движущего момента линейных синхронных двигателей с заданным номером мотор-колеса 1.
Изобретение относится к области электротехники и может применяться для управления электро-дифференциалами на основе электрических синхронных двигателей. Технический результат – повышение удельных энергетических характеристик электропривода транспортного средства. Способ управления активными электро-дифференциалами транспортного средства основан на изменении и дискретном управлении величиной мощности и движущего момента ротора в каждом мотор-колесе, которое осуществляют изменением электромагнитного режима линейных синхронных двигателей, расположенных в плоскости каждого мотор-колеса, перераспределением сигналов управления, подаваемых на группы индукторов линейных синхронных двигателей мотор-колес и переключением режимов электро-дифференциалов. Формирование угловых характеристик линейных синхронных двигателей, программное управление и регулирование электромагнитных активных режимов в индукторах осуществляют с помощью быстродействующих электронных ключей, а изменение активных режимов электро-дифференциалов осуществляют импульсным и фазово-импульсным способами. 4 з.п. ф-лы, 10 ил.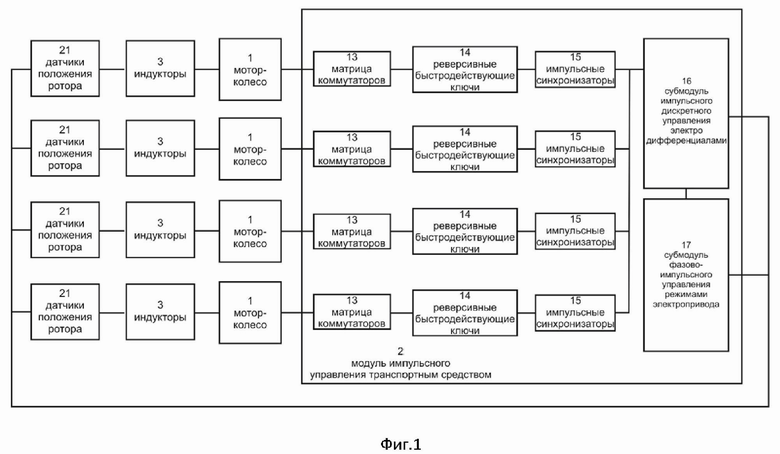
1. Способ управления активными электро-дифференциалами транспортного средства, отличающийся тем, что изменение и дискретное управление величиной мощности и движущего момента ротора в каждом мотор-колесе осуществляют изменением электромагнитного режима линейных синхронных двигателей, расположенных в плоскости каждого мотор-колеса относительно центральной оси его перемещения перераспределением сигналов управления, подаваемых на группы индукторов линейных синхронных двигателей мотор-колес и переключением режимов электро-дифференциалов с помощью дискретного управления переключением комбинаций трехфазных магнитных контакторов матрицы коммутаторов и трехфазных индукторов линейных синхронных двигателей соответствующих мотор-колес транспортного средства и дискретным соединением трехфазных обмоток индукторов последовательно в треугольник и/или каждый в независимую звезду для каждого из мотор-колес; при этом для формирования угловых характеристик линейных синхронных двигателей программное управление и регулирование электромагнитных активных режимов в индукторах осуществляют с помощью быстродействующих электронных ключей, а изменение активных режимов электро-дифференциалов осуществляют импульсным и фазово-импульсным способами; при импульсном способе включением и отключением индукторов изменяют скорость и мощность мотор-колеса, а при фазово-импульсном по начальному и конечному фронтам, получаемым от датчиков положения ротора, изменяют величины механических и угловых характеристик движущего момента ротора линейного синхронного двигателя в мотор-колесе.
2. Способ по п.1, отличающийся тем, что в качестве режимов электро-дифференциалов выбирают электро-дифференциал межколёсной пары, межбортовой электро-дифференциал и электро-дифференциал межосевой пары.
3. Способ по п.2, отличающийся тем, что реализация режима работы электро-дифференциала межколёсной пары осуществляется включением трехфазных обмоток индукторов линейного синхронного двигателя одного мотор-колеса последовательно с трехфазными обмотками индукторов линейных синхронных двигателей второго мотор-колеса этой же оси.
4. Способ по п.2, отличающийся тем, что реализация режима работы межбортового электро-дифференциала осуществляется включением трехфазных обмоток индукторов линейного синхронного двигателя мотор-колеса одной оси последовательно с трехфазными обмотками индукторов линейного синхронного двигателя мотор-колеса другой оси.
5. Способ по п.2, отличающийся тем, что реализация режима работы электро-дифференциала межосевой пары осуществляется включением трехфазных обмоток индукторов линейных синхронных двигателей мотор-колес одной оси последовательно с трехфазными обмотками индукторов линейных синхронных двигателей мотор-колес другой оси.
| Способ создания движущего момента в колесе транспортного средства грузоподъёмностью от 170 тонн и устройство для его реализации | 2017 |
|
RU2667208C2 |
| ИМПУЛЬСНЫЙ СПОСОБ РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ В ЭЛЕКТРИЧЕСКОМ ДИФФЕРЕНЦИАЛЕ ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2585202C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ И ОБОРОТАМИ СИНХРОННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2611667C1 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| EP 3327317 A1, 30.05.2018 | |||
| DE 102011017464 A1, 11.10.2012. | |||

