1
Изобретение относится к способам автоматическо.го контроля и преобразования перемещений в дискретный электрический сигнал, а именно к способам циклического преобразования перемещений в код.
Известен способ циклического преобразования угловых перемещений фазовращателя в код, заключгшвдийся в том, что на фазовращатель подают напряжения возбуждения и в пределах
2 If угла -р- (где Р - число пар полюсов
фазовращателя) преобразуют этот угол поворота в сдвиг по фазе между выходным и опорным, напряжениями на частоте возбуждения; преобразуют угол сдвига по фазе в пропорциональный ему временной интервал, а затем временной интервал преобразуют в код ll.
Недостатки данного способа заключаются в том, что на точность преобр зования оказывают влияние следующие основныеисточники погрешностей: погрешности электрической машины, обусловленные несинусоидальностью Зсшисимости выходного сигнала от угла поворота ротора относительно статора, неортогональностью обмоток.
неравенством коэффициентов передачи и др.; погрешности источников питания обусловленные неравенством амплитуд питающих напряжений или токов, неор5 тогональностью питающих напряжений или токов, коэффициентом нелинейных искажений питающих напряжений или токов и др.; погрешности электронных устройств, входящих в преобразователь,
10 обусловленные погрешностью преобразования фазового сдвига во временйой интервал, погрешностью преобразования временного, интервала в код и др. Наиболее близким по-своей техни
15 ческой сущности к изобретению является способ цик.пического преобразования перемещений в код, заключающийся в том, что на фазовращатель подают два напряжения питания двух неодинаковых
20 частот, в каждом цикле опроса суммируют сигналы, наводимле напряжениями возбуждения, определяют сдвиг фазы . между огибающими выходного и опорного напряжений, сдвиг фазы преобразу- .
25 ют во временной интервал, а затем временной интервал преобразуют в
код DL
Однако на точность преобразования по этому способу оказывают влияние 30 следующие основные источники погрешностей: погрешности электрической машины, обусловленные несинусоидальностью зависимости выходного сигнала от угла поворота ротора относительно статора, неортогональностью обмоток, неравенством коэффициентов передачи и др; погрешности источников питания, обусловленные неравенством амплитуд питающих: напряжений или токов, неортогональностью питающих напряжений или токов и др.; погрешности электронных устройств, входя|щих в преобразователь, обусловленные погрешностью преобразования фазового сдвига во временной интервал, погрешностью преобразования временного интервала в код и -др.
Целью изобретения является повышение точности преобразования перемещений в код.
Поставленная цель достигается что согласно способу циклического преобразования перемещений в код, заключающемуся в преобразовании перемещений в аналоговые сигналы, измерении аналоговых сигналов и преобразовании их в код, диапазон перемещений разделяют на интервалы, последовательно в каждом интервале измеряют результат преобразования перемещения в аналоговый сигнал и по его значению вычисляют кодовое значение перемещения по соотношению - величина сигнала на -ом интервале; п - число интервалов. По значению этого кода суДят о величине измеряемого углового или л нейного перемещений. Анализ соотношений показывает, что число интерва лов, на которые делят диапазон пере :мещений, должно быть не менее четырех для получения однозначности информсщии. Выполнение предлагаемой последовательности .действийJпoзвoля ет повысить точность преобразования ;В код за счет усреднения погрешностей. Погрешность преобразования определяется согласно соотношению .сх il:.,-«.Se,.siv, Щ cf--an;ipi aJ111 ±Л« c sx|asin siv,x|:a.co Из этого соотношения следует, что все виды погрешностей усредняются и их влияние существенно ослабляется, что приводит к повышению точности преобразования. Анализ этого соотношения показывает, что при увеличении числа интервалов погрешность преобразования уменьшается (при , ()..
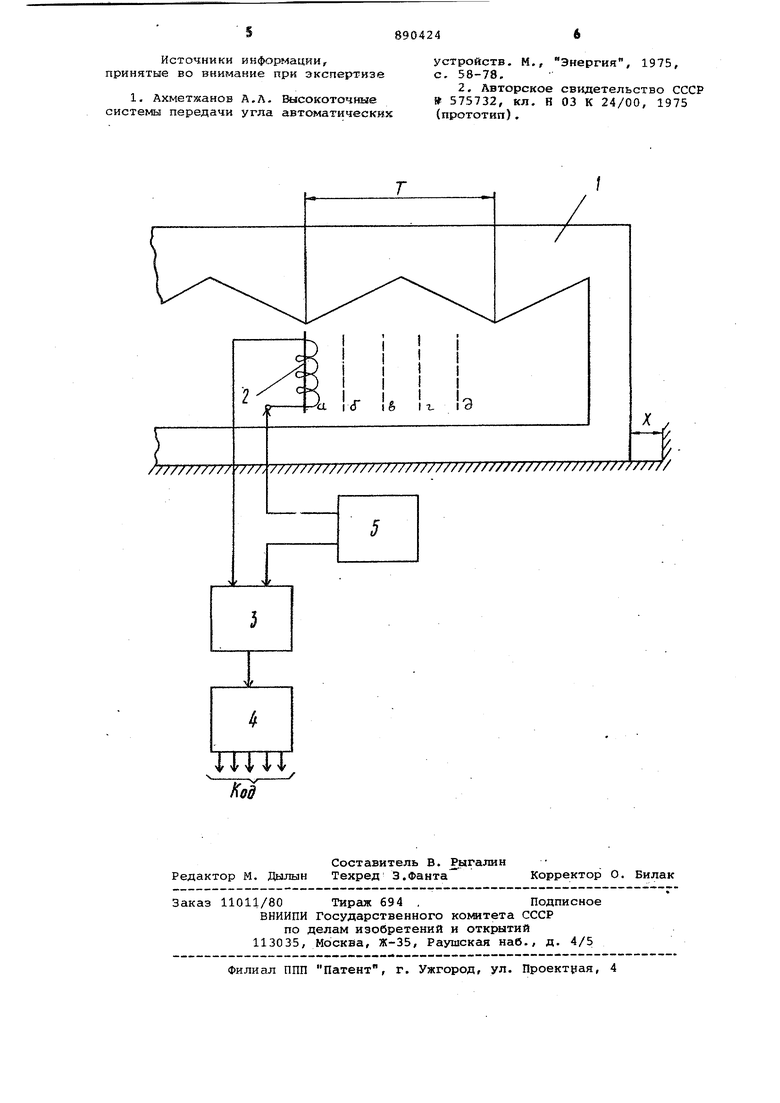
На чертеже приведена реализация способа преобразования перемещений в код на примере преобразователя перемещений в код.
Преобразователь содержит зубчатую ферромагнитную рейку 1, переменную индуктивность 2, преобразователь 3 величины тока через индуктивность в пропорциональное число, вычислитель 4, блок 5 питания.
Зубчатая рейка 1 имеет зубцы, нанесенные с шагом Т. Зубчатая рейка 1 перемещается в направлении X, и величину бе перемещения измеряют преобразователем 3. В каждом цикле преобразования для какого-либо фиксированного положения рейки 1 переменная индуктивность 2 последовательно занимает положение а, б, в, гид. При этом положения а, б, в, гид делят период нанесения зубцов Т рейки 1 на п частей, где п - число положений переменной индуктивности 2. Токи I- , протекавощие через индуктивность Ц , преобразуются в числа преобразователем 3 величины тока через индуктивность в пропорциональное число. Эти числа поступают в вы1ислитель 4, в котором производится их обработка по соотношению
1.-сое
x--qKrto- ,
15-1
|l,.i. величин а, пропорцион аль н ая току, протекающему через индуктивность в положениях а, б, в, г и дг число положений а, б, в, г и д. Экономический эффект от использования предложенного способа обусловлен отмеченными его техническими преимуществами. Формула изобретения Способ циклического преобразования перемещений в код, заключающийся в преобразовании перемещений в аналоговые сигналы, измерении аналоговых сигналов и преобразовании их в код, отличающийся тем, что, с целью повышения точности преобразования, диапазон перемещений разделяют на интервалы, последовател-ьно в каждом интервале измеряют результат преобразования перемещений в аналоговый сигнал и.по его значению вычисляют кодовое значение перемещения по соотношению Д 2Й(1-1) 2, X avctg- JSi-J i.cj-i si и где а - величина сигнала на 1-ом интервале; п - число интервалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля ортогональностиВЕКТОРОВ НАпРяжЕНий пиТАНия дВуХ-фАзНОгО фАзОВРАщАТЕля | 1979 |
|
SU834598A1 |
| Преобразователь угла поворота вала | 1984 |
|
SU1249698A1 |
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1978 |
|
SU743127A1 |
| Индукционный преобразователь угловыхпЕРЕМЕщЕНий | 1979 |
|
SU823826A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1508344A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU732955A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Широкодиапазонный калибратор фазовых сигналов | 1984 |
|
SU1226339A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1987 |
|
SU1457165A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1571758A1 |
