(5) МАГНИТОЭЛЕКТРИЧЕСКИЙ ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр | 1981 |
|
SU1006941A1 |
| Магнитоэлектрический динамометр | 1982 |
|
SU1087785A1 |
| Динамометр | 1981 |
|
SU1049757A1 |
| Магнитоэлектрический динамометр | 1979 |
|
SU787916A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
| Акселерометр | 1983 |
|
SU1138746A1 |
| Трехопорные электромагнитные весы | 1985 |
|
SU1290082A1 |
I
Изобретение относится к информа.ционно-измерительной технике и может найти широкое применение для том-, ных измерений и усилий, а также массы, плотности, веса различных тел в широком диапазоне.
Известен магнитоэлектрический динамометр, содержащий магнитоэлектрический преобразователь с подвижной катушкой на упругом подвесе с электрической схемой fl.
Наиболее близкими к предлагаемому по технической сущности являются двухпредельные магнитоэлектрические динамометры, содержащие два упругих элемента, KOTopfcie с помощью механического упора, установленного на свободном конце жесткого упругого элемента, соединяются параллельно, датчик перемещения катушки силовой компенсации с двумя обмотками, установленный на корпусе датчика, а также решающий усилитель и блок напря.жен1ий уставок, причем один вход усилителя соединен с выходом датчика перемещения через ключ, управляющий вход которого соединен с контактной парой, а второй вход усилителя через ключ соединен с выходами блока напряжения уставок 2.
Недостатком этих датчиков является ограничение верхнего предела Q измерения величиной номинального компенсирующего усилия.
Цель изобретения - расширение верхнего предела измерения,
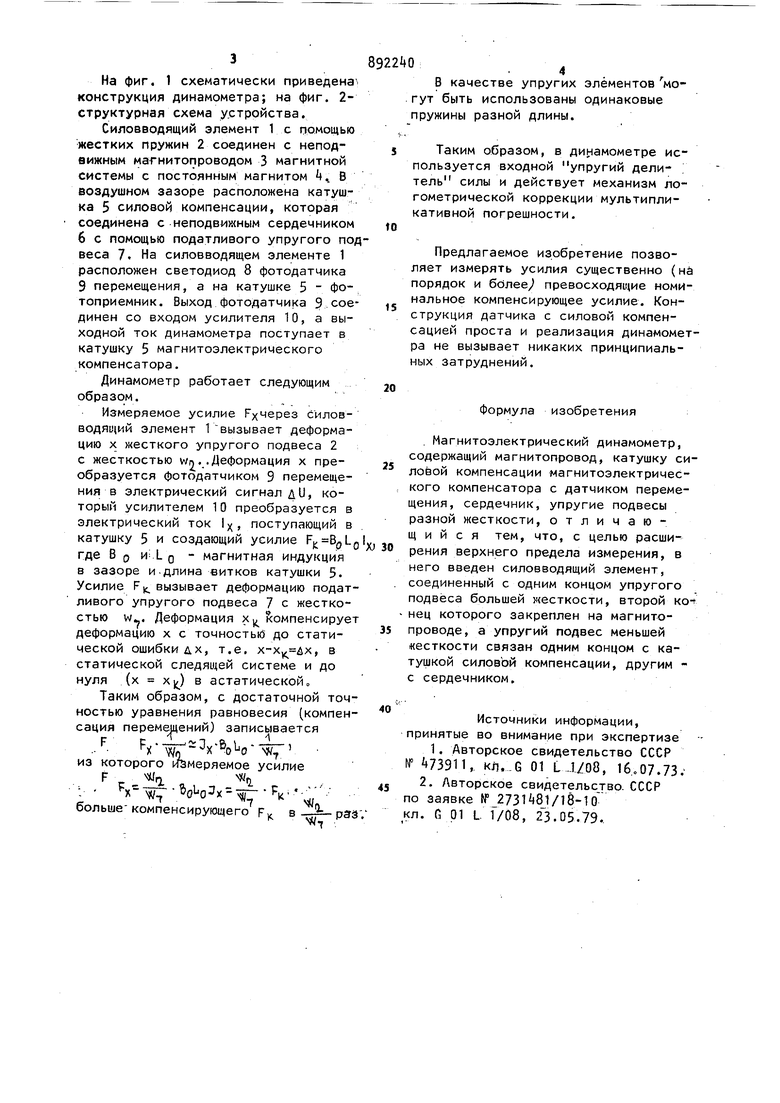
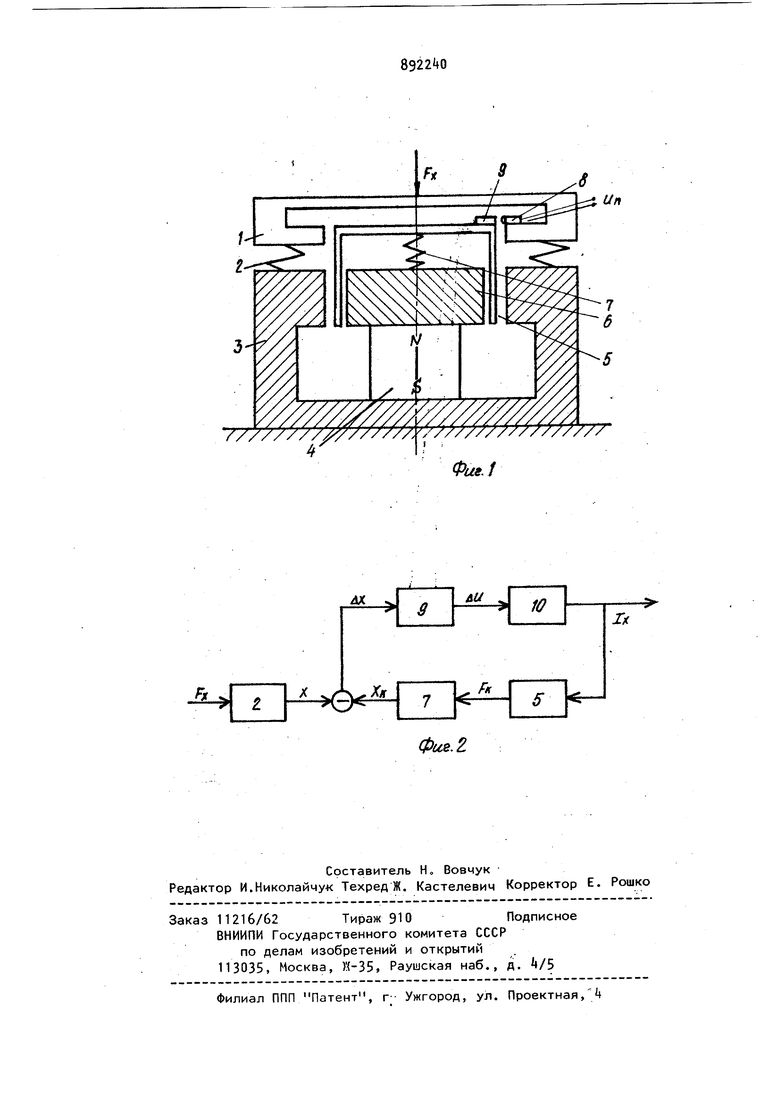
Эта цель достигается тем, что в магнитоэлектрический динамометр введен силовводящий элемент, соединенный с одним концом упругого подвеса большей жесткости, второй ко нец которого закреплен на магнитопроводе, а упругий подвес меньшей жесткости одним концом с катушкой силовой компенсации, другим - с , сердечником. На фиг. 1 схематически приведена конструкция динамометра; на фиг. 2структурная схема устройства. Силовводящий элемент 1с помощью жестких пружин 2 соединен с неподвижным магнитопроводом 3 магнитной системы с постоянным магнитом В воздушном зазоре расположена катушка 5 силовой компенсации, которая соединена с неподвижным сердечником 6 с помощью податливого упругого по веса 7. На силовводящем элементе 1 расположен светодиод 8 фотодатчика 9 перемещения, а на катушке 5 фотоприемник. Выход фотодатчика 9 сое динен со входом усилителя 10, а выходной ток динамометра поступает в катушку 5 магнитоэлектрического компенсатора. Динамометр работает следующим образом. Измеряемое усилие FXчерез силовводящий элемент 1 вызывает деформацию X жесткого упругого подвеса 2 с жесткостью Wn..Деформация х преобразуется фотодатчиком 9 перемещения в электрический сигнал ди, который усилителем 10 преобразуется в электрический ток у, поступающий в катушку 5 и создающий усилие F 8(51 где В о и .1 о - магнитная индукция в зазоре и.длина витков катушки 5. Усилие F вызывает деформацию подат ливого упругого подвеса 7 с жесткостью W... Деформация Х| :омпенсируе деформацию х с точностью до статической ошибки дх, т.е. х-Ху,дх, в статической следящей системе и до нуля (х Х|) в астатической Таким образом, с достаточной точ ностью уравнения равновесия (компен сация перемещений) записьшается F.FV , которого измеряемое усилие F оN«n г- а ft 1 Y. n-f «7 большекомпенсирующего В качестве упругих элементов могут быть использованы одинаковые пружины разной длины. Таким образом, в динамометре используется входной упругий делитель силы и действует механизм логометрической коррекции мультипликативной погрешности. Предлагаемое изобретение позволяет измерять усилия существенно (на порядок и более} превосходящие номинальное компенсирующее усилие. Конструкция датчика с силовой компенсацией проста и реализация динамометра не вызывает никаких принципиальных затруднений. Формула изобретения . Магнитоэлектрический динамометр, содержащий магнитопровод, катушку силоёой компенсации магнитоэлектрического компенсатора с датчиком перемещения, сердечник, упругие подвесы разной жесткости, отличающийся тем, что, с целью расширения верхнего предела измерения, в него введен силовводящий элемент, соединенный с одним концом упругого подвеса большей жесткости, второй KOt нец которого закреплен на магнитопроводе, а упругий подвес меньшей «есткости связан одним концом с катушкой силовой компенсации, другим с сердечником. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № it73911, Kii..G 01 L J/08, 16.07.73.2. Авторское свидетельство. СССР по заявке № 2731Bj/18-10кл. G 01 L. 1/08, 23.05.79..
Фие,2.
