Изобретение относится к информационно-измерительной технике и может найти широкое применение для точных измерений усилий, массы, плот.ности, веса различных тел в широком диапазоне.
Цель изобретения - увеличение верхнего предела измерения и исклюг чение погрешности силового компенсатора от нестабильности магнитной индукции.
На чертеже приведена -конструкция динамометра (а) и его структурная схема (б),,
Устройство состоит из катушки силовой компенсации 1, катушки с двумя обмотками отрицательной жесткости 2, упругого подвеса 3, магнитной системы 4, магнитопровода 5, жестко соединенной пластины 6 и неподвижной пластины 7 емкостного датчика, источника стабильного тока 8, первого 9 и второго to модуляторов генератора импульсов 11, усилителя 12 и фазочувствительного вольтметра 13.
Измеряемое усилие Fy воздействует на чувствительный элемент динамометра - подвижную часть, содержащую на общем каркасе катушку силовой компенсации 1 с двумя обмотками отри цательной жесткости 2 rto краям. Подйижная часть закреплена с основанием с помощью упругого подвеса 3. Катушка силовой компенсации 1 расположена в рабочем зазоре магнитной сиетемы с постоянным магнитом 4 и магнитопроводом 5. С подвижной частью жеско соединены пластина б емкостного датчика перемещения, неподвижный электрод 7 которого закреплен на магнитопроводе 5. Обмотки отрицательной жесткости соединены с источником 8 стабильного тока через модулятор 10. Модуляторы 9 и 10 в токово цепи катушки силовой компенсации управляются синхронно от генератора 11. Разность напряжений в обоих полупериодах модуляции То/2 усиливается усилителем 12 и вьшрямляется фазочувствительным вольтметром .13.
Динамометр работает следующим образом.
Генератор 11 формирует симметричные прямоугольные импульсы модуляции с длительностью Т.
В течение, полупериода модуляции модуляторы 9 и 10, например, разомкнуты, а в течение второго полупериода замкнуты. Тогда в первом Полупериоде на чувствительный элемент динамометра воздействует только измеряемое усилие FX , а жесткость упругого подвеса определяется только механической жесткостью С . Под действием усилия упругий подвес 3 деформируется и подвижная часть перемещается на FX величину Х . Перемещение Xj преобразуется емкостным датчиком 7 в электрический сигнал li( , поступающий на вход разностного звена. Во втором полупериоде модуляторы 9 и 10 замкнуты, и на чувстёительНый элемент воздействует усилие где F, Вд1ао1ц- усилие цепи обратной связи магнитоэлектрического силового компенсатора с длиной витков LQ катушки 1, расположенной в зазоре с индукцией BO. Результирующая жесткость упругого продвеса Cg-uC, где
Во
L j г величина отрицатель4,С
Бо
ной жесткости, создаваемая катуигками 2 с длиной витков LC , током о при градиенте магнитной индукции grad В (о ширина зазора) .
Под действием усилия Гх-Р. подвижная часть перемещается на расстояние
F,-FK
г. Перемещение Хз преобСо-й.е
разуется емкостным датчиком в электрический сигнал 0 , который вычитается с сигналом О, и разность & U U|-и 2 усиливается усилителем 12, выпрямляется вольтметром 13 и ток поступает в катушку 1 силового компенсатора, создавая усилие FK , снижающее значение разности сигналов uU Uj-1/2 По малых величин в автокомпенсационной следящей системе. При достаточно большом значении коэфЛпциента преобразования системы с достаточной точностью можно считать А и О и уравнение преобразования системы запишется в виде
x-cTl -McTile
L oSfl
е
Из выражения измеряемой силы видим, что она в | Ю раз больше, компенсирующего усилия. С другой стороны, отрицательная жесткость.проюрциональна магнитной индукции в зазоре, а из 11822854
меряемое усилие также пропорциональ- образом, в динамометре ис лючается
но величине магнитной индукции Bj, и, как видим, измеряемое усилие не.зависит от магнитной индукции. Таким
основной источник погрешности силового компенсатора, обусловленный нестабильностью магнитной индукции.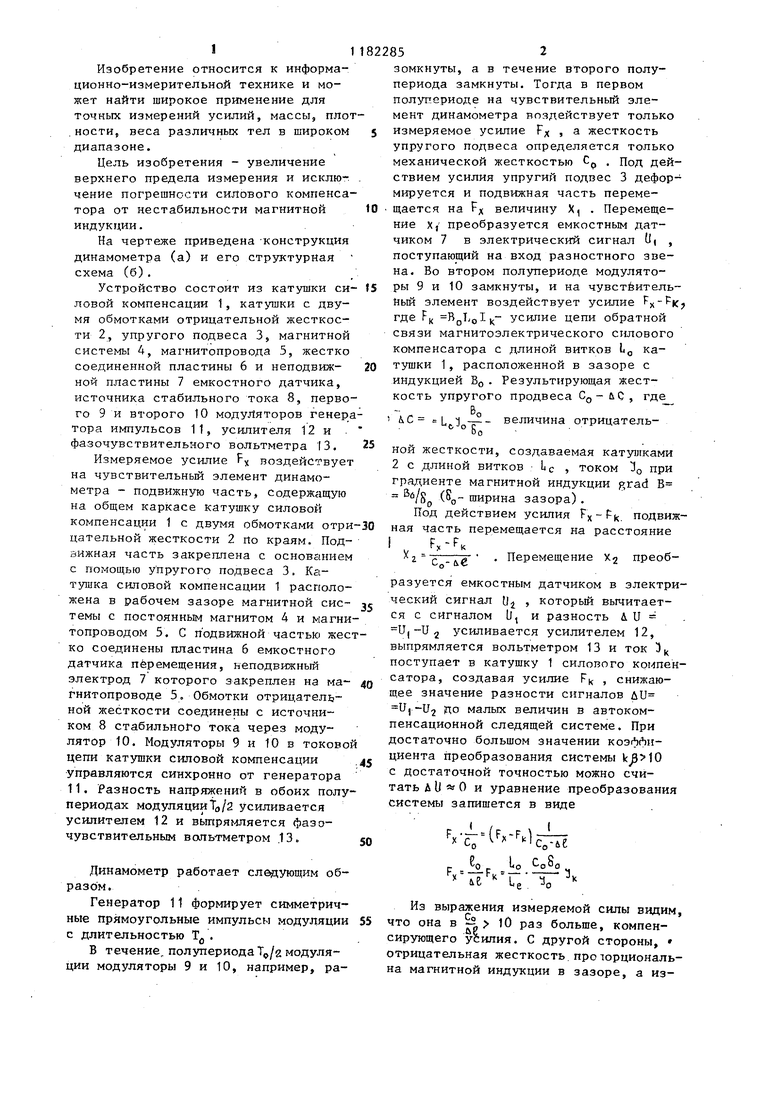
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
| Динамометр | 1981 |
|
SU1006941A1 |
| Магнитоэлектрический динамометр | 1980 |
|
SU892240A1 |
| Магнитоэлектрический динамометр | 1982 |
|
SU1087785A1 |
| Акселерометр | 1983 |
|
SU1138746A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1068723A1 |
| Динамометр | 1981 |
|
SU1049757A1 |
| Устройство для измерения давления | 1978 |
|
SU781637A1 |
МАГНИТОЭЛЕКТРИЧЕСКИЙ ДИНАМОМЕТР, содержащий чувствйтельньй элемент на упругом подвесе, магнитоэлектрический силовой компенсатор с подвижной катушкой, на которой размещены обмотки отрицательной жесткости и силовой компенсацииj емкостный датчик перемещения, включенный в электрическую схему уравновешивания, состоящую из модулятора, усилителя, соединенного с фазочувствительным вольтмет4)ом, синхронизированным генератором импульсов, и стабилизатор тока, отличающийся тем, что, с целью увеличения верхнего предела измерения и исключения Погрешности силового компенсатора от нестабильности магнитной индукции, в него введен второй модулятор, управляющий вход которого соединен с выходом генератора импульсов, при этом обмотка отрицательной жесткости через второй модулятор подключена к стабилизатору тока.
| Магнитоэлектрический динамометр | 1979 |
|
SU787916A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитоэлектрический динамометр | 1973 |
|
SU473911A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
