4:.
СО ел
. №овретение относится к ттформационноизмв тельной технике и может найти широкое применение для точных измерений усилий, массы, плотности, веса различных теп в широком диапазоне.
1 естпы динамометры с силовой компенetaistfe, содержащие магнитоэлектрический преоб зователь с подвижной компенсационной кр шкой на упругом подвесе, преобраэова да мекомпенсации и усилитель с демодулято- JQ ром 1.
Диапазон измерения таких данамометров твеляк и ограничивается снизу величиной погрешности преобразования, а сверху - вели-чиной компенсирующего усилия.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является динамометр, содержащий основание, силоприемный и силовводящий элементы, связанные с упругим подвесом, датчик его дефор- мации, катушку силовой компенсации, магнитную систему и электрическую схему .преобразования напряжения датчика перемещения в ток катушки компенсации 2.
Значительное увеличение верхнего предела
измерений достигается в динамометре за счет упругих элементов сутцественно различной жесткостн (на один-два порядка). Это не позволяет, как правило, обеспенить идентичность упругих свойств элементов подвеса и осуществить в полной мере логометрическую коррекцию погрешностей упругих элементов. С)тцественное различие жесткостей упругих элементов вызьшает различные резонансные частоты, сужая частотный диапазон измерений.
Целью изобретения является повышение точности динамометра путем уменьшения усиЛИЯ компенсации и увеличение верхнего предела измерения...
Поставленная цель достигается тем, что силовводящий элемент выполнен в виде рычага, концы которого установлены на основание через одинаковые упругие элементы, силоприемный элемент установлен на рычаг с эксцентриситетом, при этом конец рычага , ближайший к силоприемному элементу, соединен с катушкой силовой компенсации.
Эксцентриситет расположения силоприемного элемента обеспечивает соотношение плеч рычага в пределах 0,9-0,99.50
На фиг. 1 изображена схема конструкции динамометра; на фиг. 2 - структурная схема.
Силовводяший элемент представляет рычаг 1, установленный .концами на одинаковых пружинах 2. В средней части рычага установлен сило- 55 приемный элемент 3, например, в виде штока с шkpикoвoй опорой, мало смещенный от центральной оси. На концах рычага установлены
одинаковые индуктивные датчики перемещения 4.
С одним из концов рычага жестко соединена катушка 5 силовой компенсации, расположенная в зазоре магнитной системы с постоянным магнитом 6 и магнитопроводом 7.
Работа динамометра осуществляется следующим образом.
Измеряемое усилие Р, преобразуется 8 н 9 (фиг. 2) в усилия F и 2 обратно пропорциональные длинам t п ty плечей рычага. Усилие F сжимает пружину 2 на Х и преобразуется в преобразователе 10. Из усилия
F вычитается компенсирующее усилие F
к и разность fj и сжимает пружину 2 на 2 преобразуется в преобразователе 11. Перемещения X ь, и X j преобразуются индуктивными датчиками перемещения 12 и 13 в
(J , котоэлектрические напряжения U к
рые при дифференциальном включении датчиков вычитаются. Разность d U U - Uусиливается 14 н преобразуется в выходной ток D)(, который поступает в катушку duioadle компенсации. Магнитоэлектрический компенсатор 15 создает компенсирующее усилие
.
гдеBO - индукция;
1,0 - длина витков катуижи 5; Jx - . Согласно структурной схеме фиг. 2
0, K,,(U,-U,)f,,F,
где К.,С- жесткость пружин 2;
I/ г- коэффициент преобразования
9 е,+ е2
датчиков перемещения 4;
коэффициент усиления, Ц выражение для измеряемой силы FV с достнточной точностью при
К/5
равно
/ г
F., rfvy/
в
Отношение плеч рычага - может быть сделано 0,9-0,99. Тогда измеряемое усилие будет в 19-190 раз больше компенсирующего.
Дополнительная погрешность чувствительности по сравнению с обычным компенсационным
динамометром, от нестабипьностей плеч TgТ , мала, так как рычаг выполнен из одногои того же материала и находится в одинаковых температурных условиях.
Конструктивно динамометр практически не усложняется, так как рычаг исключительно
прост; погрешность его практически не увеличивается, по сравнению с компенсационным,, а предел измерения существенно, на два порядка и более возрастает. Эти обстоятельства позволяют получить ощутимый экономический эффект.
V
7
15
0ifi.Z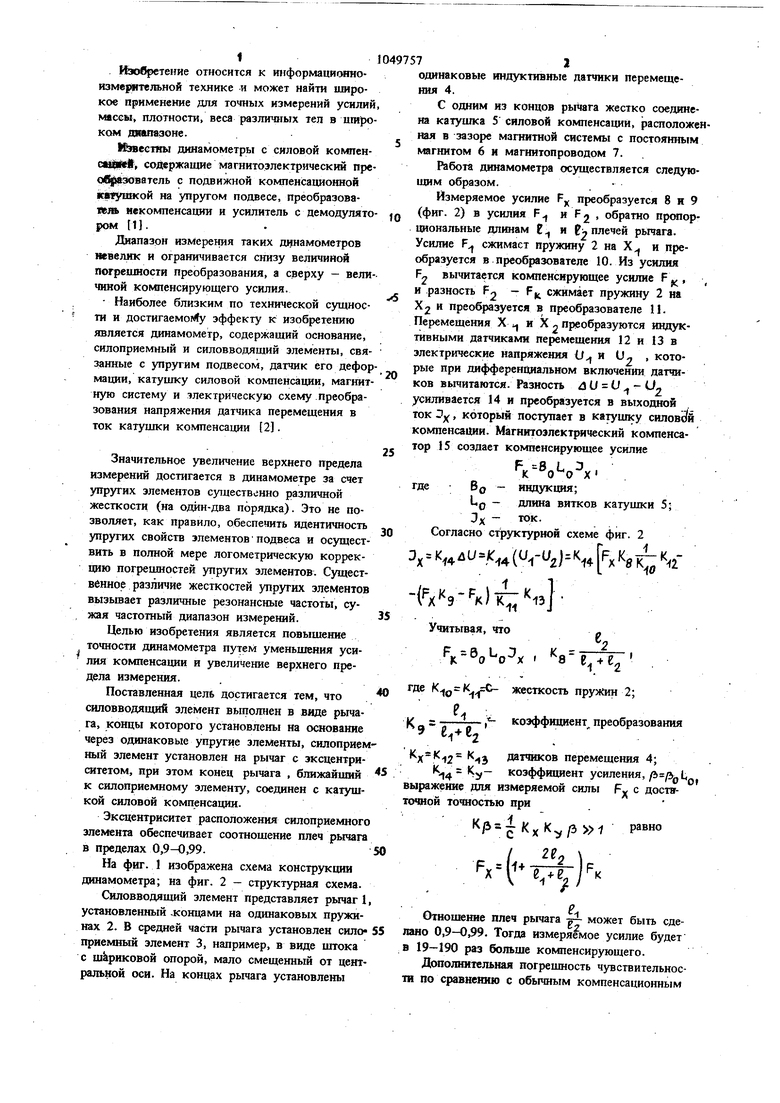
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр | 1981 |
|
SU1006941A1 |
| Магнитоэлектрический динамометр | 1980 |
|
SU892240A1 |
| Магнитоэлектрический динамометр | 1982 |
|
SU1087785A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
| Магнитоэлектрический динамометр | 1979 |
|
SU787916A1 |
| Акселерометр | 1983 |
|
SU1138746A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1068723A1 |
| Электромагнитные весы | 1985 |
|
SU1315820A1 |
1. ДИНАМОМЕТР, содержапцш основание, сялоприемный и силовводящий элементы, связанные с упругим подвесом, датчик его деформации, катушку силовой компенсации. магнитную систему и электрическую схему преобразования напряжения датчика деформации в ток катушки компенсашт, о т л и ч а ю щ и и с я .тем что, с целью повьш1ения точности измерения путем уменьшения усилия компенсации, снловводящий элемент вьшош1ен в виде рычага, ксжцы которого установлены на основание Через одинаковые упругие эяементь, сияоприемный. элемент установлен на рычаг с зксцент сптетом, при этом конец ртчага, ближайцгай к силоприемному элементу, соединен с катушкой силовой компенсации. 2. Д|шамометр поп. },отличающ н и с я тем, что, с целью увеличения верхнего предела измерения, эксцентриситет, с i которым установлен на рычаг силоприемный элемент, о1 словлиВает соотношение плеч ры(Л «га в пределах 0,9-0,99.
| Контрольно-измеритеяыюя техника | |||
| Экспресс-информация, 1968, реф | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское, свидетельство СССР то заявке V 2911033/10 | |||
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
