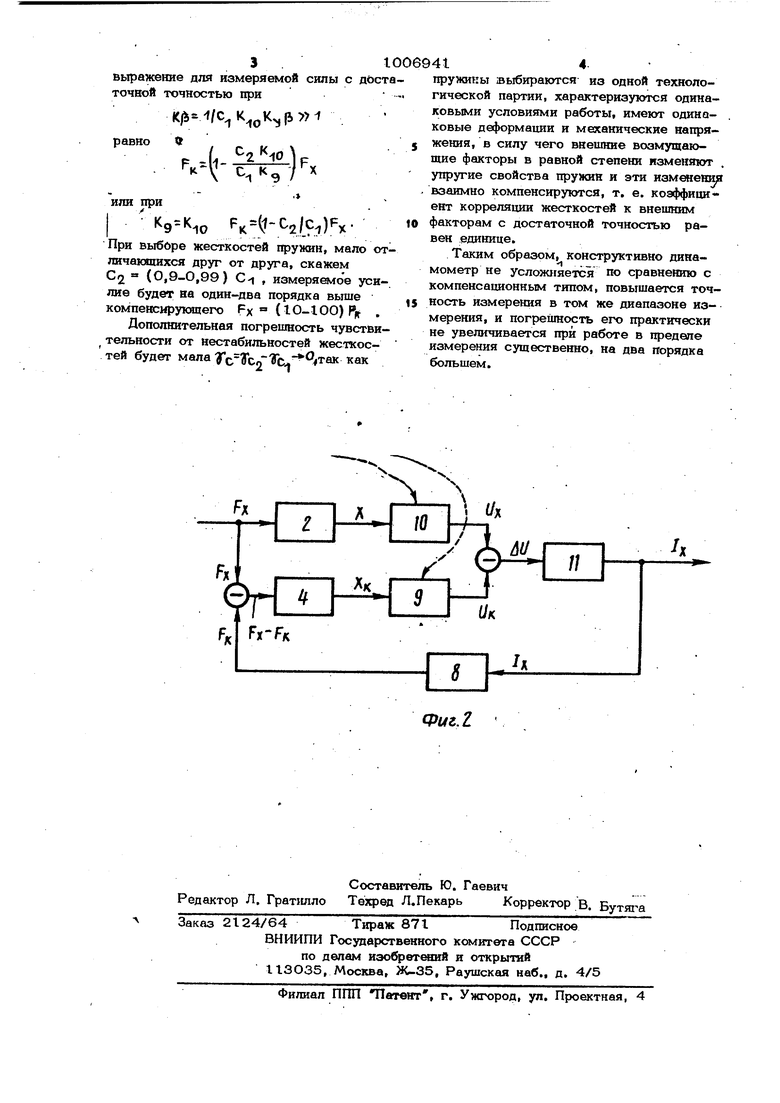
Изобретение относится к ии})ормацион но-измерительной технике и может найти широкое применение для точных измере НИИ усилий, массы, плотности, веса различных тел в широком диапазоне. Известны двухпредельные магнитоэлектрические динамометры, содержащие. два упругих элемента, которые с помошью механического упора, установленно.- го на свободном конце жесткого упруго го элемента.соединяются параллельно , датчик перемещения катушки риловой компенсации с двумя обмотками, установленный на корпусе датчика, а также решающий усилитель и блок напряжения уставок l.. . Недостатком этих динамометров является то, что они позволяют, расширить только вниз диапазон измеряемых усилий, а верхний предел измерения ограничивается величиной номинального компен сируюшего усилия, которое составляет . в лучшем случае несколько ньютонов. Наиболее близким к изобретению по технической сущности и достигаемому эф фекту является динамометр, содержащий силовводящий элемент, упругий подвес, датчик перемещения, катушку силовой компенсации, магнитную систему и элект рическую схему преобразования напряжения датчика перемещения в ток катушки компенсации 2. . Значительное увеличение верхнего пре дела измерений достигается за счет упругих элементов существенно различной жесткости (на один-два порядка). Это не позволяет как праютло, обеспечить идентичность упругих свойств элементов подвеса и осуществить в полной логометрическую коррекцию погрешностей упругих элементов. Существенное различие жесткостей упругих элементов вызывает различные резонансные часто- ты, сужая частотный диапазон измерений Целью изобретения является повышение точности динамометра за счет снижения величины компенсирующего усилия Поставленная цель достигается т&л, что датчик перемещения выполнен в вид . дифференциального емкостного датчика, одна обкладка которого соединена с силовводящим элементом, другая жестко соединена с катушкой компенсации и заземлена, третья соединена с магнитной системой, а упругий i подвес вьшолнен в виде двух последовательно соединенны идентичных по геометрии витка цилиндри ческих пружин с соотношением длин в пределах О,9-О,99, причем Концы двух пружин соединены с заземленной обкладкой датчика, а другие их концы: один с силовводящим элементом, другой - с магнитной системой. На фиг. I - представлена схема конструкции динамометра; на фиг. .2 - структурная схема., Динамометр содержит сшюввод5шщй элемент 1, соединенный с одним концом пружины 2,второй конец которой соединен с дни- , ем каркаса 3 катушки силовой компенсацнт с днищем каркаса 3 с другой стороны соединен конец второй пружины 4, другой конец которой соединен с неподвижным полюсным наконечником 5 магнитной системы с постоянным магнитом 6 и магнитопроводом 7. В зазоре расположена обмотка 8 катушки силовой компенсации. Датчиками перемещения катущвки и силовводящего I являются емкостные датчики, образов.анные неподвижным электродом 9, заземленным электродом-днищем каркаса 3 катушки и подвижным изолированным кольцевым электродом Ю в нижней части силоввоДяЩего элемента 1. Динамометр работает следующим образом. Измеряемое усилие Fjt воздействует на пружину I с жесткостью С , вызьгаая ее деформацию X. На пружину 4 вхэздействует разность измеряемой силы Fx и компенсирующей Fj , т. е. Fy - F которая вызывает деформацию Xj . Деформация X вызывает изменение зазора и соответственно емкости между пластиной to иднищем каркаса 3, а деформация Х(( - изменение зазора и емкости между днищем каркаса 3 и пластиной 9. Изменение емкостей датчиков 9 и Ю перемещений; вызывает соответствукмцее изменение напряжений и Емкостные датчики включены в сосед-, ние плечи емкостного моста, с диагонали которого снимается выходное напряжение ди Ujj - и . Напряжение &U II усиливается и преобразуется в ток DX который поступает в катушку 8 силовой компенсации с длиной витков расположенных в зазоре с магнитной индукцией BO , Катушка с током Зх создает компенсирукяцее усилие Fn BQlHgOx, Согласно структурной схеме (фиг. 2) а,к 1лиК,Ди,-иоV K ,и, учитывая, что -х/
выражение для измеряемой силы точной точностью приK/i-f/c SoSli
равно Ф
г ло F 7
- --(
Ц Kg
или при
К,о )При выборе жесткостей пружин, мало отличающихся друг от друга, скажем С2 (0,9-0,99) С-1 , измеряемое усилие будет на один-два порядка выше компенсирующего Рх (lO-lOO)Ppf .
Дополнительная погрешность чувствительности от нестабильностей жесткоетей будет мала
как
пружины выбираются из одной технологической партии, характеризуются одинаковыми условиями работы, имеют одинаковые деформации и механические напряжения, в силу чего внешние возмущающие факторы в равной степени изменяют . утфугие свойства пружин и эти изменения взаимно компенсируются, т. е. коэффициент корреляции жесткостей к внешним
факторам с достаточной точностью равен единице.
Таким образом, конструктивно динамометр не усложняется по сравнению с компенсационным типом, повышается точность измерения в том же диапазоне измерения, и погреигаость его практически не увеличивается при работе в пределе измерения существенно, на два порядка большем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический динамометр | 1980 |
|
SU892240A1 |
| Динамометр | 1981 |
|
SU1049757A1 |
| Магнитоэлектрический динамометр | 1982 |
|
SU1087785A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
| Магнитоэлектрический динамометр | 1979 |
|
SU787916A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| Емкостной акселерометр | 1984 |
|
SU1174861A1 |
| Акселерометр | 1982 |
|
SU1059513A1 |
ДИНАМОМЕТР, содержащий силовводяшшй элемент, упругий подвес, датчик перемещения, катушку силовой компенсации, магнитную систему и электрическую схему преобразования напряжения датчика перемещения в ток катушки компет1сации, отличающийся тем, что, с целью повышения, точности измерения за счет снижения величины компенсирующего усилия, датчик перемещения выполнен в виде дифференциального емкостного датчика, одна обкладка которого соединена с силовводящим элементом, другая жестко соединена с катушкой компенсации и заземлена, третья соединена с магнитной систетлой, а упругий подвес выполнен- в виде двух последовательно соединенных идентичных по геометрии .. .. витков цилиндрических пружин с соотношением длин в пределах О,9-О,99, тфичем концы двух пружин соединены с заземленной обкладкой датчика, а другие их концы: один - с силовводящим елементом, другой - с магнитной системой. Од ю 4i)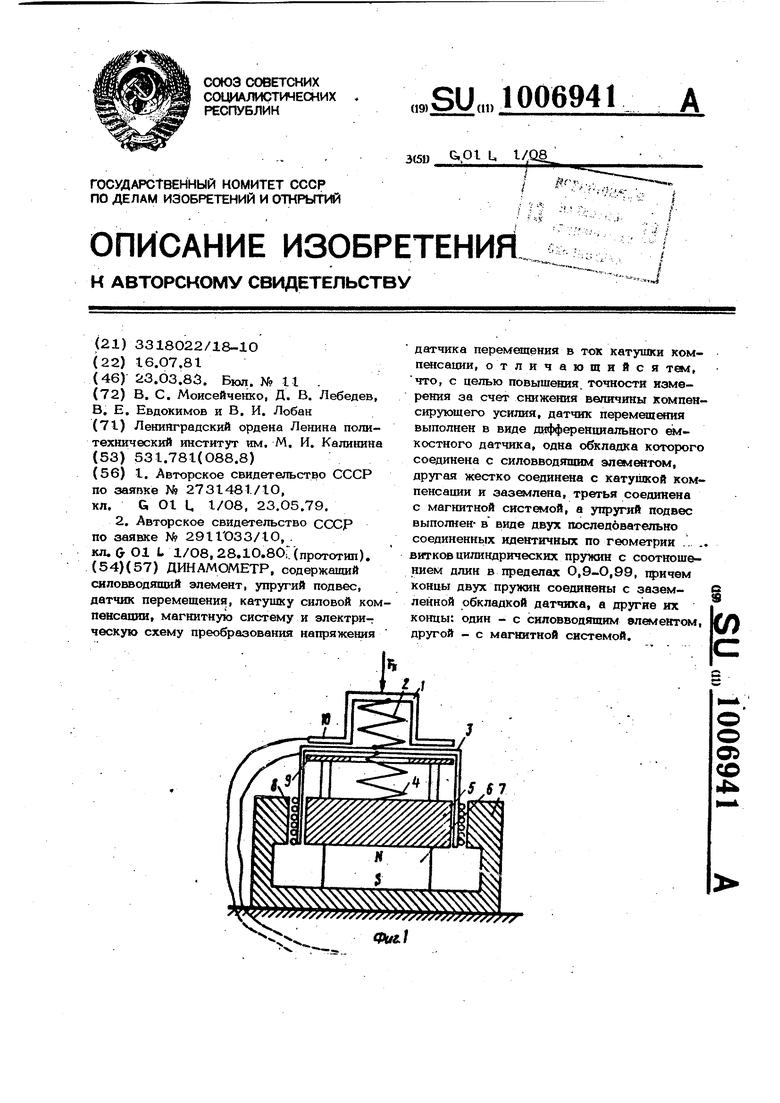
Х
/А
Фиг.1
| t | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
