(5А) АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ СУДОВОГО РУЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления силовым приводом судового руля | 1978 |
|
SU737291A2 |
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ СУДОВОГО РУЛЯ | 1970 |
|
SU288581A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАРЕЗНОГО СТРЕЛКОВОГО ОРУЖИЯ И РЕАЛИЗУЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2603334C2 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU978111A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА | 2004 |
|
RU2280226C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРОАППАРАТОВ ТРАМВАЯ И ТРОЛЛЕЙБУСА | 2002 |
|
RU2248582C2 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU962883A1 |
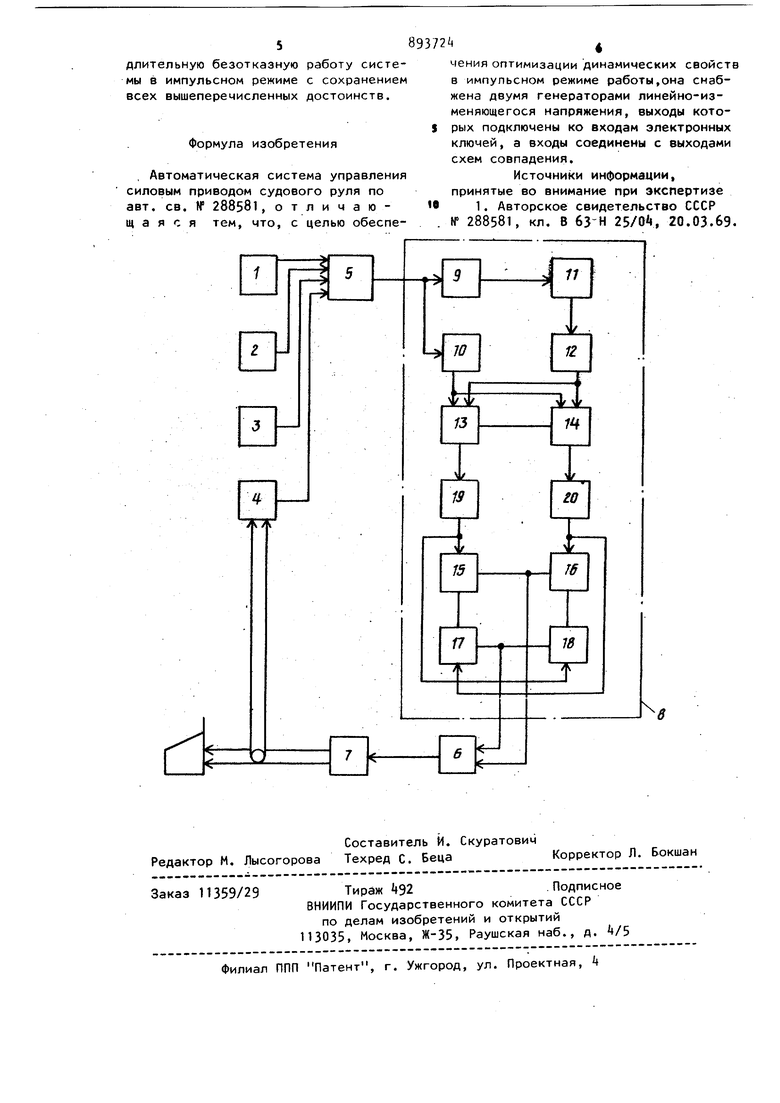
Изобретение относится к судовой автоматике, в частности, к автоматической системе управления силовым пр водом судового руля. По основному авт. св. № 288581 из вестна автоматическая система управления силовым приводом судового руля содержащая датчик курса, дифференцирующее устройство, интегрирующее уст ройство, датчик обратной связи, суммирующее устройство, усилитель сигнала и исполнительные механизмы, а также широтно-импульсный модулятор, вход которого подключен к выходу суммируюи его устройства, а выход сое динен со входом усилителя, и включающий в себе аналого-цифровой преоб разователь, блок определения фазы сигнала, дешифратор, блок формирования длительности импульса, схемы совпадений и электронные ключи l j. Однако недостаткомтакой системы является то, что в такой системе широтно-импульсная модуляция предполагает воздействие на усилитель с исполнительными механизмами в видепрямоугольных импульсов с крутыми фронтами и максимальной амплитудой, где переменной величиной является лишь длительность. Воздействие на систему, состоящую из электромашинных усилителей и электрогидравлической рулевой машины, импульсов максимальной амплитуды с пренебрежимо малой длительностью переднего фронта приводит к развитию в отдельных устройствах и всей системе переходных процессов нежелательного характера, а именно колебательного. При этом в механических узлах возникают значительные паразитные моменты, а в электрических цепях - перенапряжения. В связи с этим при достаточно длительной работе в импульсном режиме возможен преждевременный выход из строя любого элемента системы,что недопустиМО с учетом условий эксплуатации судов. Цель изобретения - i оптимизация ди намических свойств системы управления силовым приводом судового руля, работающей в импульсном режиме. Для достижения указанной цели автоматическая система управления силовым приводом судового руля снабжена двумя генераторами линейно-изменяющегося напряжения, выходы которых подключены ко входам электронных ключей, а входы соединены с выходами схем совпадения. На чертеже представлена блок-схема автоматической системы управления силовым приводом судового руля. Система содержит датчик 1 курса, дифференцирующее устройство 2, интегрирующее устройство 3 и датчик Ц обратной связи, выходы которых соеди нены со входами суммирующего устройства 5. Со входом усилителя 6, выход которого подключен к исполнительным механизмам 7, связан выход широтноимпульсного модулятора 8, который включает в себя аналого-цифровой пре образователь 9, блок 10 определения фазы сигнала, дешифратор 11, блок 12 формирования длительности ммпульса, схемы 13 и 1 совпадений, электронные ключи 15-18 генераторы 19 и 20 линейно-изменяющегося.напряжения, вы ходы которых подключены ко входам электронных ключей 15 18 и 16, 17, а входы соединены соответственно с выходами схем 13 и Ik совпадения. Вход модулятора 8 подключен к выходу суммирующего устройства 5. Система работает следующим образом. При отклонении судна от курса сиг налы с датчика 1 курса, дифференцирующего 2 и интегрирующего 3 устройств, а также с датчика обратной связи алгебраически складываются на суммирующем устройстве 5.. Суммарный сигнал с устройства 5 поступает на аналого-цифровой преобразователь 9 и блок 10 определения фазы сигнала. На выходе аналого-цифрового преобразователя 9 в дискретные моменты времени, определяемые периодом квантования, формируется значение сигнала ошибки в цировом виде, которое передается на дешифратор 11. С дешифрато ра 11 дешифрованный сигнал поступает на блок 12, в котором формируется длительность импульса, поступающего на схемы 13 и совпадений. На вторые входы схем 13 и И совпадений подается разрешающий, либо запрещаюий потенциал с блока 10 определения азы сигнала ошибки. Таким образом, широтно-модулированный импульс про ходит только через одну из схем совпадений и далее, пройдя через один из генераторов 19 или 20 линейноизменяющегося напряжения открывает в одном случае электронные ключи 15 и 18, а в другом - 16 и 17. Сигнал с электронных ключей поступает на усилитель 6 и воздействует на исполнительные механизмы 7, которые осуществляют необходимую перекладку руля. Оптимизация динамических свойств системы управления силовым приводом судового руля, работающего в импульсном режиме, осуществляется следующим образом. Широтно-модулированный импульс с выхода одной из схем 13 или совпадений поступает соответственно на вход одного из двух генераторов 19 или 20 линейно-изменяющегося напряжения на выходе которых напряжение изменяется по кривой, близкой к экспоненте. С выхода генератора 19 или 20 сигнал поступает соответственно на электронные ключи 15 и 18 или 16 и 17. При этом переход ключей 15 и 18 или 16 и 17 из закрытого состояния 8 открытое происходит не мгновенно, а по закону, определяемому генераторами 19 и 20 линйно-изменяюцегося напряжения, т.е. близко к экспоненциальному. а именно V « ММ где V текущее значение напряжения на выходах генераторов; максимальное значение напряжения на выходах генераторов;текущее время; Тох - псх:тоянная времени времязадающих цепей. Скорость нарастания переднего фронта широтно-модулированного импульса, определяемг(я постоянной времени Ту, при этом выбирается такой, чтобы обеспечить монотонный характер переходных процессов во всех силовых элементах системы, что и обеспчивает достижение поставленной цели. Технико-экономический эффект предлагаемого изобретения состоит в том, что оказывается возможным обеспечить
длительную безотказную работу системы в импульсном режиме с сохранением всех вышеперечисленных достоинств.
Формула изобретения
, Автоматическая система управления силовым приводом судового руля по авт. св. № 288581, отличающаяся тем, что, с целью обеспечения оптимизации динамических свойств в импульсном режиме работы,она снабжена двумя генераторами линейно-изменяющегося напряжения, выходы которых подключены ко входам электронных ключей, а входы соединены с выходами схем совпадения.
Источники информации, принятые во внимание при экспертизе
