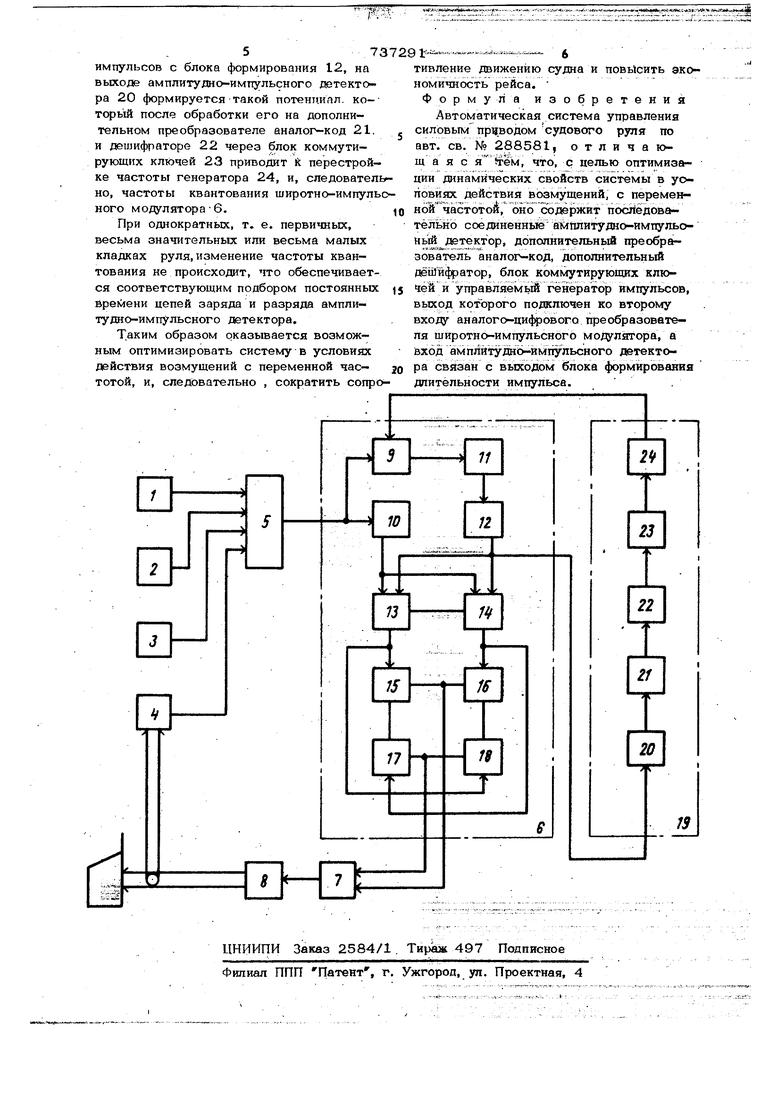
йа при неоправданно больших и частьк перекладках руля. Кроме того, при этом не исключена перегрузка рулевой машины что также уменьшает возможность использования автоматического управления в различных условиях плавания, поэтому при сильном волнении на море обычно переходят с автоматического на ручное управление курсом судна. Целью изобретения является оптимизация динамических свойств системы автоматического управления в условиях действия сильных возмущений с переменной частотой. Для достижения указанной цели в автоматическую систему управления силовым приводом судового руля введены последовательно соединенные амплитудно-импульсный детектор, дополнительный преобразователь аналог код, дополнительный деши(} ратор, блок коммутирующих ключей и управляемый генератЬр импульсов, выход кокотсфого подключен ко второму входу аналого-цифрового преобразователя широтно-импульсного модулятора, а вход амплитудно-импульсного детектора связан с . выходом блока формирования длительности импульса. На чертеже представлена блок-схема автоматической системы управления си- ловым приводом судового руля. Система содержит датчик курса 1, дифференцирующее устройство 2, интегри рующее устройство 3 и датчик обратной связи 4, выходы которых соединены со входами суммирующего устройства 5. Выход суммирующего устройства 5 соеди нен со входом широтно-импульсного моцупятора 6, выход которого заведен на вход усилителя 7 . Выход усилителя 7 но дключен к исполнительным механизмам 8. Широтно-импульсный модулятор 6 вкл чает в себя аналого-цифровой преобразователь 9, блок определения фазы сигнала 10, дешифратор 11, блок формирования
дпительности импульса 12 схемы совпадений 13 и 14 и электронные ключи 1518. Система также содержит устройство коррекции 19, вход которого подалючен к выходу блока формирования длительности импульса 12, а выход соединен со вторым входом аналого-цифрового преобразователя 9, Устройство коррекции состоит из последовательно соединенньк ампли-тудно-импульсного детектора 20, дополнительного преобразователя аналог-код 21, дополнительного дешифратора 22, блока коммутирующих ключей 23 и упра&ветствующий длительности сформированного импульса, в цифровом виде поступает на вход дополнительного дешифратора 22,
управляющего блоком ключей 23, который коммутирует реактивйью элементы упра&ляемого генератора импульсов 24. Выход управляемого генератора импульсов 24 соединен со вторым входом аналого-цифрового преобразователя 9 и определяет период квантования всего широтно-им- пульсного модулятора 6.
В случае повторяющихся -значительных кладок руля, т. е. больших длительностей ляемого генератора импульсов 24, Система работает следующим образом. При откло}1ении судна от курса сигналы с датчика курса 1, дифференцирующего 2 и интегрирующего 3 устройств, а также с датчика 4 обратной связи алгебраически складьтаются на суммирук щем устройстве 5, Суммарный сигнал с устройства 5 поступает на аналого-цифроври преобразователь 9 и блок определения фазы сигнала 10. На выхода аналогоцифрового преобразователя 9 в дискрет-, ные моменты времени, определяемые периодом квантования Т, (частотой генера- тора), формируется значение сигнала ошибки в цифровом виде, которое передается на дешифратор 11. С дешифратора 11 дешифрованный сигнал поступает на блок 12, в котором формируется длительность импульса, поступающего на схемы совпадений 13 и 14. На вторые входы схем совпадений 13 и 14 либо подается разрешающий, либо запрещающий потендиал с блока определения фазы сигнала ошибки 10. Таким образом широтно-модулирЪванный импульс Проходит только через одну из схем совпадений и открывает в одном случае электронные ключи 15 и 18, а в другом - 16 и 17. Сигнал С электронных ключей поступает на усилитель 7 и воздействует на исполнительные механизмы 8, которые осуществляют необходимую перекладку руля. Оптимизация динамических свойств системы управления в условиях действия возмущений с изменяющейся частотой осуществляется следующим образом. Широтно-мо;: лированный импульс с выхода блока формирования длительности 12 поступает на вход амплитудно-, импульсного детектора 20, на выходе которого формируется при этом сигнал в виде определенного значения потенциала, поступающего далее на вход дополнителького преобразователя аналог-код 21. С выхода преобразователя 21 сигнал, соотимпульсов с блока формирования 12, на выходе амплитудно-импульсного детектора 20 формируется такой потенциал, который после обработки его на дополнительном преобразователе аналог-код 21. и дешифраторе 22 через блок коммутирующих ключей 23 приводит k перестройке частоты генератора 24, и, следовател но, частоты квантования широтно-импуль ного модулятора6. При однократных, т. е. первичных, весьма значительных или весьма малых кладках руля, изменение частоты квантования не происходит, что обеспечивается соответствующим подбором постоянных ЁреМени цепей заряда и разряда амплитудно-импульсного детектора. Таким образом оказывается возможным оптимизировать систему в условиях действия возмущений с переменной частотой, и, следовательно , сократить сопро
737291 тивление движению судна и экономичность рейса. Формула изобретения Автоматическая система управления силовым приводом судового руля по авт. св. № 288581, о т л и ч а а я с , что, с целью оптимизации динамических свойств системы в уоповйях действия возмущений, с переменной частотой, оно содержит последовательно соединенные амплитудно-импульоный детектор, дополнительный преобра sJB ts,-:.-.i....iiL . .,.... ,„..-.. зователь аналог-код, дополнительный дешифратор, блок коммутирующих ключей и управляемьй генератор импульсов, выход которого подключен ко второму входу аналого-ци(} ового преобразователя щиротно-импульсного модул ятора, а вход ам плитуjDBO-HMiiynbCHoro детектора связан с выходом блока формирования длительности импульса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| Автоматическая система управления силовым приводом судового руля | 1980 |
|
SU893724A2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ СУДОВОГО РУЛЯ | 1970 |
|
SU288581A1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Устройство для измерения параметровфЕРРОМАгНиТНыХ МАТЕРиАлОВ | 1979 |
|
SU822099A1 |
| Преобразователь постоянного напряжения в переменное программируемой формы | 1981 |
|
SU972650A1 |
| Устройство для цифровой индикации многоканального регулятора температуры | 1983 |
|
SU1211709A1 |
| СИСТЕМА ЦИФРОВОГО СТЕРЕОФОНИЧЕСКОГО РАДИОВЕЩАНИЯ | 1991 |
|
RU2019041C1 |
| Устройство регулирования и стабилизации мощности | 1987 |
|
SU1578703A1 |
