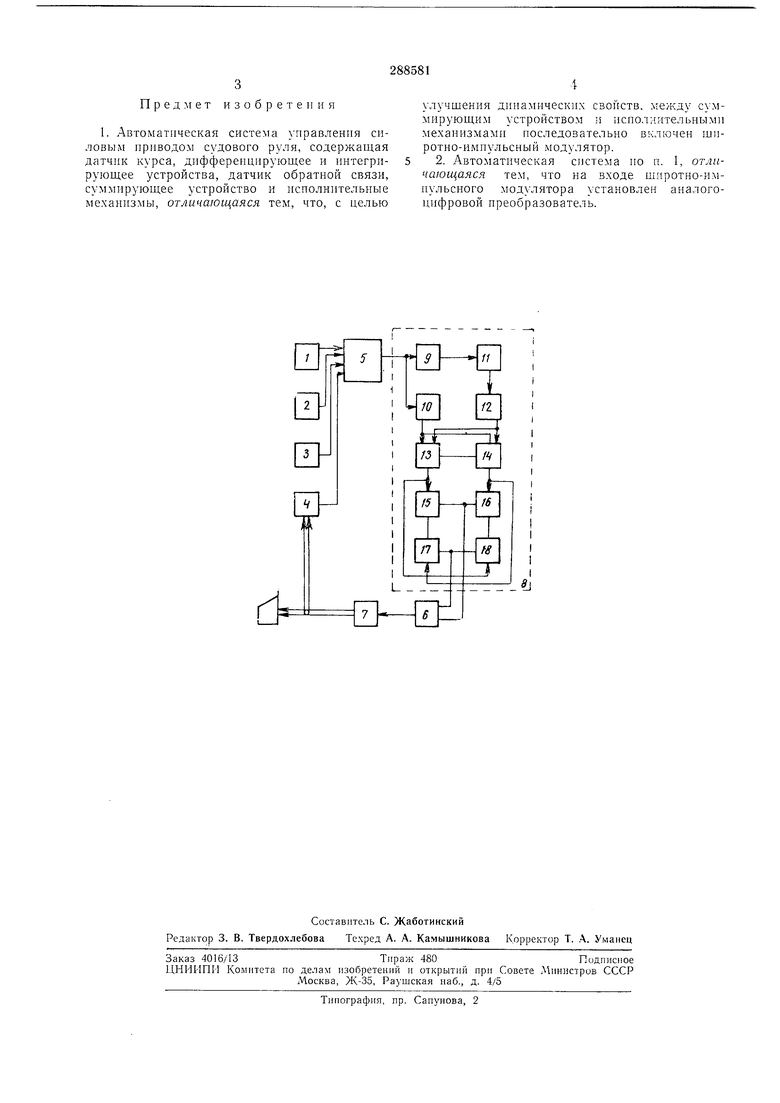
Известим автоматические системы управления силовым приводом руля, содержащие датчик курса, дифференцирующее и интегрирующее устройства, датчик обратной связи, суммирующее устройство и исполнительные механизмы. Особенность описываемой спстемы состоит в том, что между суммирующим устройством и исполнительными механизмами последовательно включен широтно-импу„тьсиый модулятор. Это улучщает дина.мические свойства системы. Кроме того, на входе широтно-импульсного модулятора может быть установлен аналогонифровой преобразователь. На чертеже изображена блок-схема системы. Система содержит датчик / курса, дифференцирующее устройство 2, интегрирующее устройство 3 и датчик 4 обратной связи, электрически связанные с суммирующим устройством 5, а также усилитель 6 сигнала, взаимодействующий с исполн 1тельными механизмами 7. Между суммирующим устройством и исполнительными механизмами последовательно вклрочен широтно-И Мнульсный модулятор 8, включающий в себя аиалого-цифровой преобразователь Я блок 10 оиределения фазы сигнала, дещпфратор 11, блок 12 формирования длптельностп имнульса, схемы 13 и 14 созиадений и электронные ключи 15-18. При отклонении судна от курса сигналы с датчика курса, дифференц;1рующего п интегрирующего устройств, а также с датчика обратной связи складываются на суммирующем устройстве. Суммарный с 1гнал ноступает на аналого-цифрово преобразователь и блок определения фазы сигнала. Ма выходе аналого-цифрового нреобразователя в дискретные моменты времени, определяемые периодом новторення, формируется з;1ачение сигнала ошибки в цифровом виде, которое нередается на дешифратор. Дешифрованный сигнал поступает на блок формирован;1я. в котором форлгируется длительность импульса, поступающего на схемы совпадений. На вторые входы схем совпадепнй подается разрешающий либо запрещающий потенциал с блока определения фазы сигнала ошибки. Таким образом, щиротно-модулированный импульс проходит только через одну ii3 схем совпадений и открывает в одном случае элекгронные ключн 15 и 18, а в другом - 16 и 17. Сигнал с электронных ключей поступает на усилитель 6 п воздействует на исполн 1тельные механизмы, которые осуществляют необходимую нерекладку нера- руля.
Предмет изобретения
1. Автоматическая система управления силовым приводом судового руля, содержащая датчик курса, диффереицирующее и интегрирующее устройства, датчик обратной связи, суммирующее устройство и исполнительные механизмы, отличающаяся тем, что, с целью
улучшения динамических свойств, между суммирующим устройством i иснолнительиыми механизмами последовательно включен широтно-имиульсный модулятор.
2. Автоматическая система но п. 1, отличающаяся тем, что на входе щиротно-импульсного модулятора установлен аналогоцифровой преобразователь.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| Автоматическая система управления силовым приводом судового руля | 1978 |
|
SU737291A2 |
| Автоматическая система управления силовым приводом судового руля | 1980 |
|
SU893724A2 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ВТОРОЙ ПРОИЗВОДНОЙ | 1969 |
|
SU249081A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ ПРОПЛАВЛЕНИЯ ПРИ РОЛИКОВОЙ КОНТАКТНОЙ СВАРКЕ | 1967 |
|
SU192983A1 |
| Устройство для автоматической контактной печати | 1978 |
|
SU723486A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |