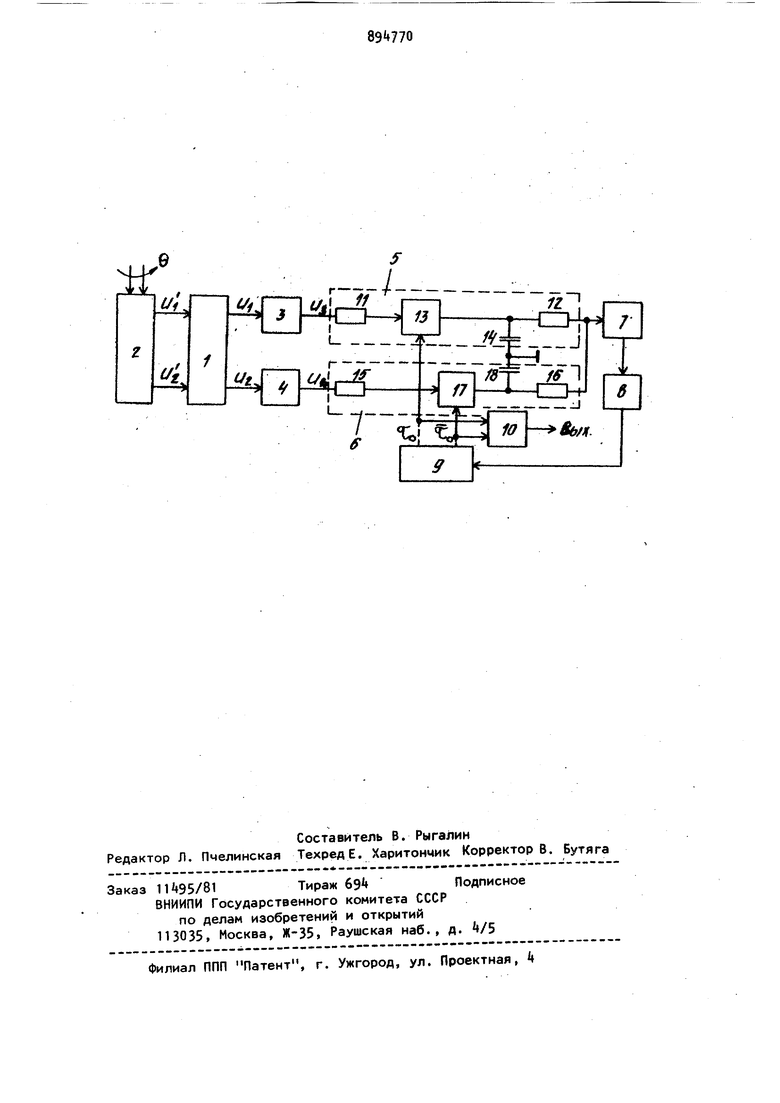
3 интервалов в код, выход которого является выходом устройства CZ. Недостатком этого преобразователя является нелинейность характеристики преобразования, так как в состоянии устойчивого равновесия отношение выходных сигналов формирователя соответ ствует тангенсу измеряемого угла. Для того, чтобы код на выходе устройства был прямо пропорционален этому углу, необходим вычислительный блок с арктангенсной характеристикой прербразования для вычисления кода угла внутри октанта. Однако подобный блок сложен с конструктивной тоуки зрения и не может обеспечить высокую точность функционального преобразования кодов. Это усложняет преобразователь в целом и уменьшает его точность. Цель изобретения - повышение точности преобразователя сигналов синусно-косинусного датчика угла в код за смет линеаризации характеристики преобразования в процессе измерения. Поставленная цель достигается тем что в преобразователь сигналов синусно-косинусного датчика угла в код, содержащий переключатель октантов, входы которого соединены с выходами синусно-косинусного датчика угла, а выходы - со входами соответств(ра4их выпрямителей, и Последовательно соеди ненные фияьтр нижних частот, нуль-индикатор и формирователь прямоугольных импульсов, выходы которого соединены со входами блока преобразования временных интервалов в код, введены два импульсно управляемых блока, сигнальные входы которых подключены к выходам соответствующих выпрямителей, управляющие входа импульсно управляемых блоков соединены с соответствующими выходами формирователя прямоугольных импульсов, первые выходы импульсно управляемых блоков подключены к выходам нулевого потенциала преобразователя, а бторые выходы подключены ко входу фильтра нижних частот. Кроме того, в преобразователе сигналов синусно-косинусного датчика угл в код каждый импульсно управляемый блок содержит два резистора, ключ и кондёнсатор, первый вход ключа через первый резистор подключен к сигнальнЪму входу импульсно-управляемого бло ка, второй вход ключа соединен с управляющим входом импульсно управляемого блока, выход ключа через конден0сатор и второй резистор подключен соответственно к первому и второму выходам импульсно управляемого блока. На чертеже приведена структурная схема преобразователя сигналов синуснокосинусного датчика угла в код. Преобразователь содержит преключатель 1 октантов, синусно-косинусный датчик 2 угла (СКДУ), выпрямители 3 и it, импульсно управляемые блоки 5 и 6,, входы которых подключены к выходам соответствующих выпрямителей 3 и t, а выходы соединены со входом фильтра 7 нижних частот, выход которого соедипен со входом нуль-индикатора 8 и формирователь 9 прямоугольных импульсов, вход которого соединен с выходом нуль-индикатора 8 , а выходы - с управляющими входами блоков 5 и 6 и входами блока 10 преобразования временных интервалов в код, выход которого является выходом устройства. Первый импульсно управляемый блок 5 содержит резисторы 11 и 12, ключ 13 и конденсатор 14, второй импульсно управляемый блок 6 содержит резисторы 15 и 1б, ключ 17 и конденсатор 18. Предлагаемый преобразователь работает следующим образом. Выходные сигналы V и Vp СКДУ 2 подаются на переключатель i октантов, который, во-первых, формирует код октанта угла поворота 9 ротора СКДУ 2 и, во-вторых, подключает указанные сигналы разной полярности к фазочувствительным выпрямителям 3 и 4. Выходы последних через два одинаковых импульсно управляемых блока 5 и 6 (ИУБ) с дообно-рациональной характеристикой соединены со входом фильтра 7. Ключи обоих ИУБ 5 и б управляются широтно-импульсными сигналами (ШИС), формируемыми блоком Э ключ 13 первого ИУБ 5 управляется ШИС с относительной длительностью VQ прямоугольных импульсов (0 S , где V - длительность , а Т - период прямоугольных импульсов) , а ключ 17 второго ИУБ 6 упpa8ляeтcJ i ШИС с относительной длительностью 0 1 прямоугольных импульсов (в дальнейшем используется упрощенная форма записи: ШИС Т или ). Выходные токи ИУБ 5 и 6 суммируются на входе фильтра 7, который ,3 суммарного сигнала выделяет постоянную составляющую и изменяет через нуль-индикатор 8 скважность ШИС to и , формируемых блоком 2, до тех пор, пока эта составляющая не станет равнс нулю. Данный момент времени фиксируется нуль-индикатором 8, срабатывание которого указывает ка дост жение состояния устойчивого равновеси схемы. Соотношение, характеризующее это состояние, может быть записано - R16(1 -«Го ) О --гго) (R11 + R12fо) V - выходные сигналы выпрямителей 3 и ;R11,R12 и - сопротивления резисторо R15.R16 первого и второго ИУБ 5 и 6 соответственно. Известно, что I х(2,8 - х) f / tq 2 ( ) (1,8+х) Выберем следующие значения сопротивлений резисторов., используемых в составе ИУБ устройства R11 1,8 R12, R15 1.8 Rt6, R12 « R16 R, Из сравнения вышеприведенных соотношений и замены переменной х на f получается vl 3- tquJТак как напряжения V и V4 пропор циональны 51пди CosO соответствен но, а их отношение пропорционально, очевидно tqв то длительность TO прямоугольных импульсов формировател 9 (в момент времени, соответствующий состоянию устойчивого равновесия схе мы) связана с углом поворота S рото датчика линейной зависимостью. Блок 10 предназначен для преобразования длительности Vo(o) прямоугольных импульсов формирователя 9 в цифровой код. Как и ио данный код связан с О линейной зависимостью, по этому нет необходимости в его дальне шем преобразовании, которое вносит с Щёственную погрешность в результаты измерений. Формула изобретения 1.Преобразователь сигналов синуснокосинусного датчика угла в код, содержащий переключатель октантов, входы которого соединены с выходами синуснокосинусного датчика угла, а выходы со входами соответствующих выпрямите- лей, и пбследовательно соединенные фильтр нижних частот, нуль-индикатор, формирователь прямоугольных импульсов, выходы которого соединены со входами блрка преобразования временных интервалов в код, отличающийся тем, что, с целью повышения точности преобразователя, в него введены два импульсно управляемых блока, сигнальные входы которых подключены к выходам соответствующих выпрямителей, управляющие входы импульсно управляемых блоков соединены с соответствующими выходами формирователя прямоугольных импульсов, первые выходы импульсно управляемых блоков подключены к выходам нулевого потенциала преобразователя, а вторые выходы подключены ко входу фильтра нижних частот. 2.Преобразователь по п. 1, отличающийся тем, что в нем каждый импульсно управляемый блок содержит два резистора, ключ и крнденсатор,. первый вход ключа через первый резистор подключен к сигнальному входу импульсно управляемого блока вто рой вход ключа соединен с управляющим входом импульсно управляемого блока , выход ключа через конденсатор и второй резистор подключен соответст- венно к первому и второму выходам импульсно управляемого блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If 57«7«0, кл. G 08 С 9/0, 1977. 2.Авторское свидетельство СССР Н- , кл. G 08 С 9/0, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1983 |
|
SU1124359A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2020752C1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1145479A1 |
| Преобразователь угла поворота вала в длительность импульсов | 1980 |
|
SU907568A1 |
| Преобразователь синусно-косинусных сигналов переменного тока в код | 1981 |
|
SU1024955A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU748477A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1120383A1 |
| Преобразователь сигналов синусно-косинусного датчика угла в код | 1982 |
|
SU1034059A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |