Изобретение относится к электроизмерительной технике и автоматике и может использоваться для преобразования сигналов с датчиков типа СКТ и им подобных в цифровой двоичный код.
Известен цифровой преобразователь перемещений, реализующий развертывающее преобразование угол-амплитуда-временной интервал-код [1].
Источниками погрешности преобразования амплитуды сигнала во временной интервал в нем являются аналоговые демодуляторы, дифференциальный усилитель, перемножающие ЦАП и формирователь кодов синуса и косинуса на основе ПЗУ с синусной прошивкой.
Наиболее близким к предлагаемому является преобразователь угла поворота вала в код с промежуточным преобразованием амплитуды во временной интервал, содержащий генератор импульсов высокой частоты, блок питания синусно-косинусного датчика угла (СКДУ), состоящий из последовательно включенных делителя частоты и фильтра, коммутатор октантов, фазосдвигающий элемент, двухполупериодные выпрямители, компаратор, измеритель временных интервалов [2] .
Источником погрешности в прототипе являются двухполупериодные выпрямители, искажающие как величину, так и форму выпрямляемых сигналов.
Целью изобретения является повышение точности преобразования при сохранении высокого быстродействия.
Для достижения цели при наличии типичных для датчиков типа СКТ преобразуемых сигналов
Us = Um sinθsin ωt;
Uc = Um cosθsinωt; = -Umcosθsinωt,, (1) где Um - амплитуда сигнала;
= -Umcosθsinωt,, (1) где Um - амплитуда сигнала;
θ - угол поворота оси датчика;
ω - несущая частота, предлагается первый из сигналов линейно преобразовать в вид
Us* = Um sinθ cosωt (2) (например, с помощью инвертирующего интегратора), сравнить на двух компараторах с двумя оставшимися входными сигналами и по результатам сравнения с помощью элемента ИСКЛЮЧАЮЩЕЕ ИЛИ выделить временной интервал, пропорциональный углу θ.
Для этой цели в известный преобразователь, содержащий формирователь старших разрядов, например формирователь квадрантов, ключ, компаратор, интегратор и генератор импульсов, введены второй компаратор, два логических элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и инвертор, счетчик, блок электронного нониуса,а также новые связи.
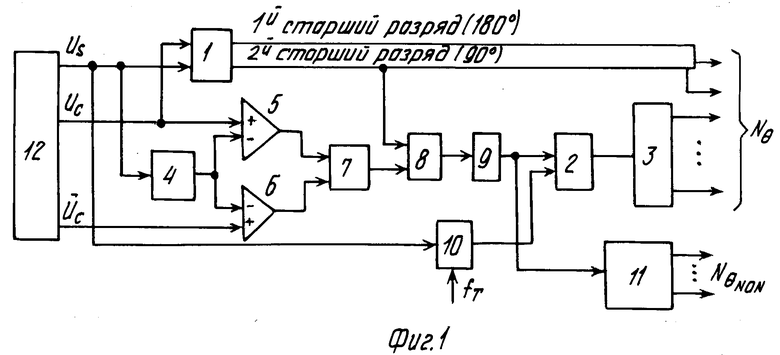
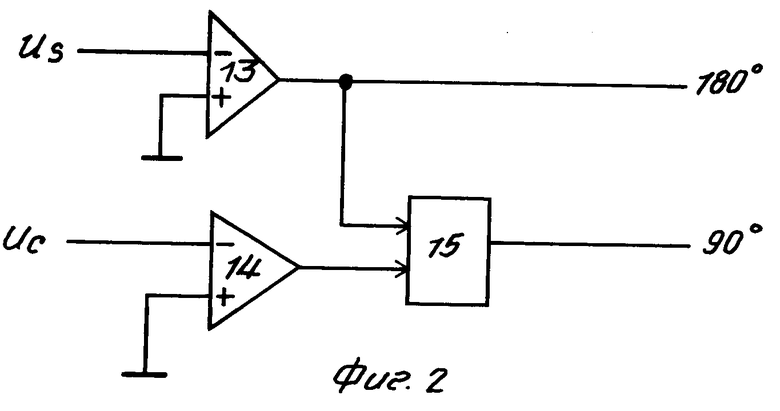
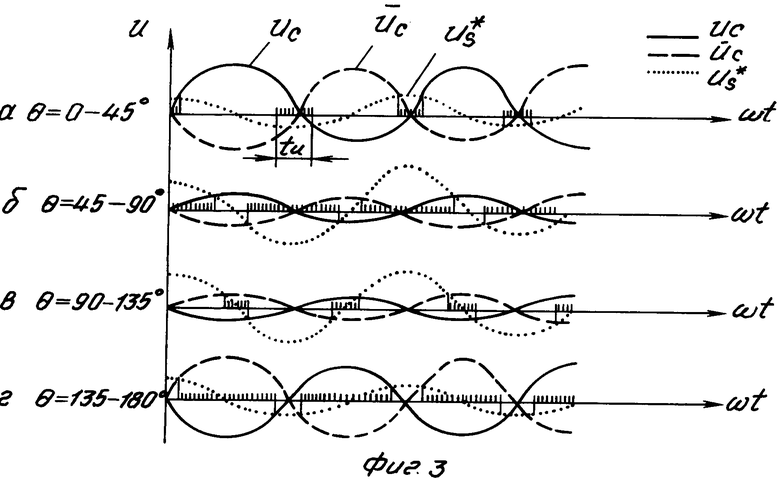
На фиг.1 приведена структурная схема преобразователя угла поворота вала в код; на фиг.2 - схема блока определения квадранта; на фиг.3 - временные диаграммы, поясняющие работу блока определения квадранта.
Преобразователь содержит формирователь старших разрядов, выполненный в виде блока 1 определения квадранта, ключ 2, счетчик 3 импульсов, интегратор 4. компараторы 5 и 6, элементы ИСКЛЮЧАЮЩИЕ ИЛИ 7 и 8, инвертор 9, генератор 10 импульсов, блок 11 электронного нониуса и СКДУ 12.
Блок 1 определения квадранта содержит компараторы 13, 14 и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 15.
Для увеличения быстродействия преобразователя в качестве формирователя старших разрядов может быть использован наряду с блоком 1 определения квадрантов и селектор октантов.
Введение в преобразователь генератора 10 позволяет увеличить точность преобразования. Введение в преобразователь блока 11 электронного нониуса с дополнительным счетчиком позволяет увеличить разрядность преобразователя без повышения тактовой частоты.
Блок 1 формирует два старших разряда кода угла, соответствующие углам 180 и 90о.
В качестве синхронизированного генератора 10 может быть использована микросхема 564ГГ1.
Преобразователь работает следующим образом.
С помощью инвертирующего интегратора 4 сигнал
Us=Umsinθsinωt преобразуется в сигнал
Us* = Um sinθ cosωt (фиг.3а).
Компараторы 5, 6 сравнивают сигналы Uc,  и Us* и выделяют на входе ключа временные интервалы
и Us* и выделяют на входе ключа временные интервалы
tи=  . (3)
. (3)
Временные интервалы заполняются частотой fт (фиг.3б, в,г) и на счетчике 3 импульсов образуется код всех остальных младших разрядов.
Полное время одного цикла преобразования не превышает половины периода несущей частоты и может быть еще уменьшено при использовании в качестве формирователя 1 не формирователя квадрантов, а селектора октантов.
Из формулы (3) следует, что в преобразователе отсутствуют все главнейшие методические погрешности, включая дифференциальную нелинейность, и основной погрешностью является стабильность несущей частоты, которая при стабилизации кварцем может достигать величины порядка 10-6-10-7. Но и эта погрешность может быть уменьшена при синхронизации несущей и тактовой частот, так как код угла
Nθ=  .
.
Как уже упоминалось выше, разрядность преобразования может быть увеличена без повышения тактовой частоты и времени преобразования с помощью использования электронного нониуса.
Инструментальная погрешность определяется в основном погрешностями интегратора и компараторов, что при современной элементной базе позволяет достигать величин порядка 10-5-10-6, т.е. точного преобразования 18-20 двоичных разрядов.
Лучшие современные измерительные приборы и цифровые вольтметры переменного тока имеют точность не более 0,01%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Многоканальный преобразователь угла поворота вала в код | 1980 |
|
SU947895A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1120383A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1119050A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Преобразователь угол-код | 1986 |
|
SU1336242A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
Преобразователь вала в код относится к измерительной технике и автоматике и может быть использован для преобразования сигналов с датчиков типа СКТ. Цель изобретения - увеличение быстродействия и точности, а также разрядности выходного кода. Цель достигается введением последовательно соединенных первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и инвертора, счетчика и блока электронного нониуса и второго компаратора, а также новыми связями. 3 ил.
ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД, содержащий синусно-косинусный датчик угла, синусный и косинусный выходы которого соединены с блоком определения квадранта, выходы которого являются выходами старших разрядов преобразователя, первый компаратор, ключ, интегратор, генератор импульсов, отличающийся тем, что, с целью увеличения его быстродействия и точности, а также разрядности выходного кода, в него введены второй компаратор, два элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, инвертор, счетчик, блок электронного нониуса, косинусный и инверсный косинусный выходы синусно-косинусного датчика угла соединены с прямыми входами соответственно первого и второго компараторов, выходы которых соединены с входами первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого соединен с одним входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого через инвертор соединен с управляющим входом ключа и входом блока электронного нониуса, выход ключа соединен с входом счетчика, выходы которого и выходы блока электронного нониуса являются выходами младших разрядов преобразователя, синусный выход синусно-косинусного датчика угла через интегратор соединен с инверсными входами первого и второго компараторов и непосредственно с входом синхронизации генератора импульсов, выход которого соединен с информационным входом ключа, выход младшего из старших разрядов блока определения квадранта соединен с другим входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ахметжанов А.А | |||
| и др | |||
| Высокоточные преобразователи угловых перемещений | |||
| М.: Энергоатомиздат, 1986, с.114, 115, рис.9.5. | |||
