(54) ДИНАМИЧЕСКИЙ АВТОМОБИЛЬНЫЙ ТРЕНАЖЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1365109A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Автомобильный тренажер | 1980 |
|
SU963068A1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| Автоматизированная система управления нагружающим устройством для стендовых испытаний автомобильных энергетических установок | 2015 |
|
RU2640667C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ИССЛЕДОВАНИЯ РАБОТЫ ОПЕРАТОРА | 2002 |
|
RU2215330C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ В ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2369909C2 |
| Устройство для имитации визуальной обстановки в тренажере транспортного средства | 1984 |
|
SU1218416A1 |
I
Изобретение относится к испытательным устройствам для исследования характеристик автомобиля и может быть использовано также для совершенствования вождения автомобиля.
Известен динамический автомобильный тренажер, содержащий цепь управления продольным перемещением макета местности, включающую в себя последовательно соединенные электронную модель двигателя, связанную с педалью подачи топлива, и исполнительный приврд ролика продольного перемещения макета местности, и цепь зшравления вращением макета местности, включающую в себя связанную с рулевым колесом сельсинную следящую систему и исполнительный привод роликов вращения макета местности (1 .
Недостатком известного устройства является отсутствие 13озможности моделирования динамических свойств автомобиля, связанных с элластичностью шин и конструктивными параметрами автомобиля, что в существенной мере снижает точность воспроизведения реальных условий движения и исключает возможность исследования влияния конструктивных параметров автомобиля на его устойчивость и управляемость.
Цель изобретения - повышение точности воспроизведения реальных условий движения автомобиля.
Указанная цель достигается тем, что тренажер снабжен последовательно соединенными связанным с рулевым колесом датчиком угла его поворота, электронной моделью движения автомобиля, преобразователем напряжения и
10 сумматором, причем один из входов злектронной модели движения автомобиля соединен с одним из выходов электронной модели двигателя, один из входов сумматора соединен с выходом сельсинной следящей системы, а вы15ход - с исполнительным приводом цепи управления вращением макета местности.
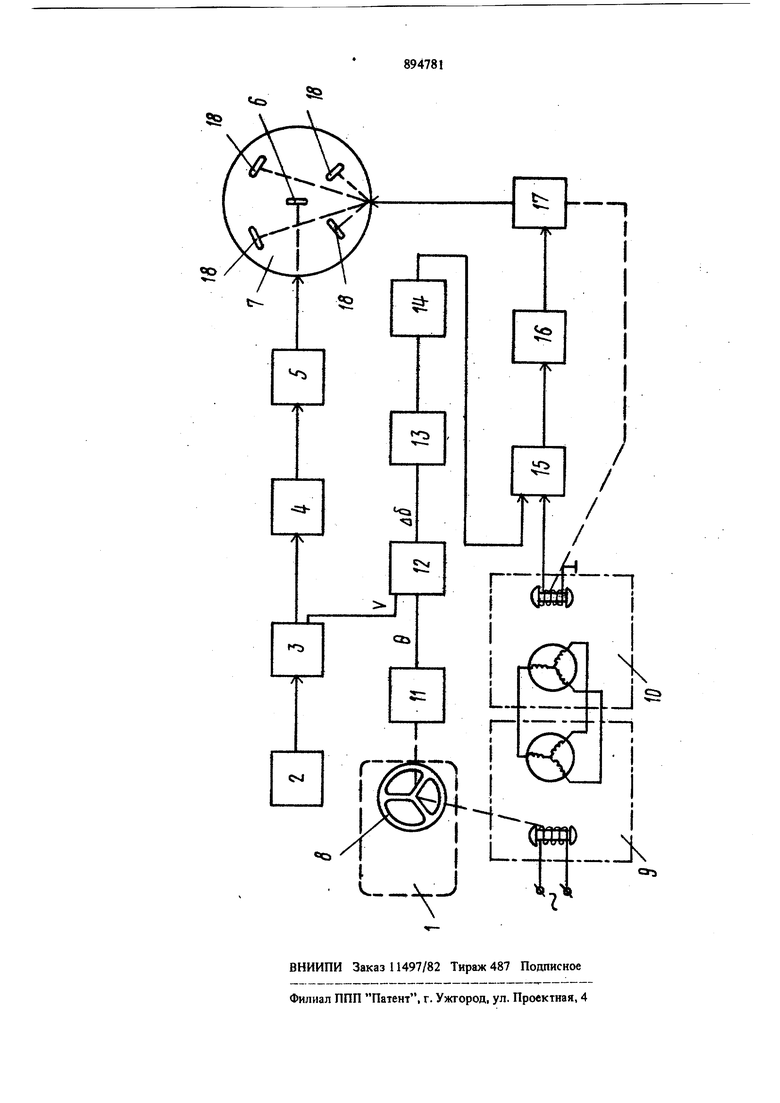
На чертеже представлена блок-схема динамического автомобильного тренажера.
Тренажер содержит кабину 1, оборудован20ную всеми приборами реального автомобиля, педаль 2 подачи топлива, соединенную с электронной Моделью 3 двигателя, связанную через усилитель 4 сигнала продольной скорости и 3 . исполнительный пртсвод 5 с роликом 6 продол ного перемещения ьакета 7 местности, рулевое колесо 8, связанное с сельсин-датчиком 9, соединенным трансфорк аторной связью с сельсин-приемником 10, кроме того, рулевое копесо соединено с датчиком 11 угла поворота рулевого колеса, выход которого связан электро1шой моделью 12 движения автомобшш соединенной через модулятор 13 и усилитель 14 модулированного сигнала с одним из входов сумматора 15, соединенного через усилител 16 управляющего сигнала с исполнительным пр водом 17 роликов 18 вращения макета местности, связанным с ротором сельсина-приемник Также один из выходов электронной модели двигателя соединен с одним из входов электронной модели 12 движения автомобиля, а сельсин-приелтик 10 соединен с сумматором 1 Устройство работает следующим образом. Воднте;п, находящийся в кабине 1, изменением угла наклона педали 2 подачи топлива с помощью электронной модели 3 двигателя формирует сигнал, пропорциональный скорости продольного движения автомобиля. По одному из каналов этот сигнал подается на усилитель 4 продольной скорости, а затем на привод 5 ролика 6 продольного перемещения макета местности. При вращении ролика 6 макет 7 местности перемещается с заданной скоростью, создавая иллюзию продольного движения при проецировании на экран дорожных ситуаций, изображенных на макете 7 местности. Кроме того, сигнал продольной скорости подается с электронной модели двигателя на первый вход электронной модели 12 движения автомобиля. На второй вход модели 12 через датшк 11 угла поворота рулевого колеса подается информация об угле поворота колеса 8 Электронная модель Движения автомобиля наб рана, например, на аналогичной вычислительной мащине по уравнениям, описывающим динамику автомобиля. В процессе решения системы вырабатывается корректирующий сигнал (разность углов увода между передней и задней осями автомобиля), который преобразуется модулятором из аналоговой формы в перемен ное напряжение с частотой 50 Гц, проходит через усилитель 14 модулированного сигнала и подается на один из входов сумматора 15. На другой вход сумматора от колеса 8 через включенную в трансформаторном режиме сельсинную пару - сельсин-датчик 9 и сельсинприемник 10 - подается информация об изменении угла поворота рулевого колеса. Суммарное напряжение является управляющим сигналом, энергетический уровень которого повышается усилителем 16 управляющего сигнала, до уровня управляющего воздействия, которое с помощью привода 17 поворачивает одновременно ролики 18 и ротор сельсинапрнемника 10,отрабатывая сигнал обратной связи в сельсинной следящей системе. Под воздействием сигнала продольного даиження и сигнала бокового движения диск макета 7 местности приобретает поступательное и вращательное движения в результате создания иллюзии общего случая движегшя автомобиля. Использование устройства позволяет за счет учета динамических свойств автомобиля повысить точность воспроизведения реальных условий движения автомобиля и исследовать влияние параметров автомобиля на его эксплуатационно-технические свойства. Формула изобретения Динамический автомобильный тренажер, содержащий цепь управления продольным перемещением макета местности, включающую в себя последовательно соединенные электронную модель двигателя, связанную с педалью подачи топлива, и исполнительный привод ролика продольного перемещения макета местности, и цепь управления вращением макета местности, включающую в себя связанную с рулевым колесом сельсинную следящую систему и исполнительный привод роликов вращения макета местности, отличающийс я тем, что, с целью повышения точности воспроизведения реальных условий движения автомобиля, он снабжен последотательно соединенными связанным с рулевым колесом датчиком угла его поворота, электронши моделью движения автомобиля, преобразователем напряжения и сумматором, причем один из входов электронной модели движения автомобиля соединен с одним из выходов электронной модели двигателя,один из входов сумматора соединен с выходом сельсииной следящей системы, а выход - с исполнительным приводом цепи управлеюш враще1 ием макета местности. Исгачники информации, принятые во внимание при экспертизе 1. Пособие для технического обслуживания электроники АТ-70 фирмы AOZ. ЧССР, 1973 (прототип).
