00
а
ел
СО
Изобретение относится к учебно- тренировочной технике и предназначено для подготовки водителей транспорных средств в лабораторных условиях.
Цель изобретения - повышение эффективности обучения путем приближения условий движения к реальным.
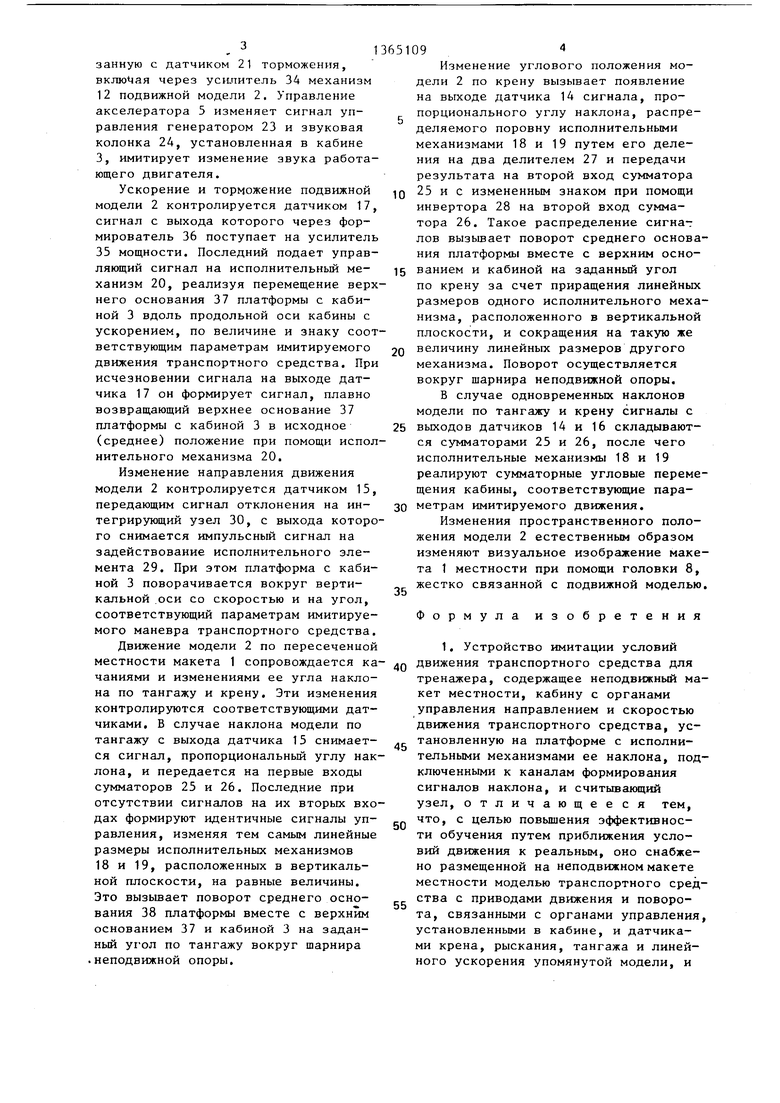
На фиг. 1 дана функциональная схема устройства; на фиг. 2 - кинематическая схема платформы.
Устройство (фиг. 1) содержит неподвижный макет 1 местности, на котором располагается модель 2 транспортного средства, выполненная в виде дитанционно управляемой тележки, кабину 3, установленную на платформе 4 и снабженную органами управления (акселератором 5, переключателем 6 коробки передач, выключателем 7 сцепления) . На модели 2- установлены считывающий узел (оптическая головка 8), связанный через преобразователь 9 сигнала с проекционным узлом 10, установленным в кабине 3. Головка 8, преобразователь 9 и узел 10 составляют приемно-передающий блок. На модели 2 установлены также механизмы 11-13 движения, торможения и поворота модели, а также датчики 14-17 крена, рыскания, тангажа и линейного ускорения соответственно. Платформа 4 снабжена исполнительными механизмами 18 и 19 наклона, а также исполнительным механизмом 20 линейного перемещения. В кабине 3 установлены датчик 21 торможения и датчик 22 положения руля. К акселератору 5 подключен генератор 23 со звуковой колонкой 24 на его выходе.
Устройство содержит также каналы формирования сигналов наклона, в которые входят сумматоры 25 и 26 и делитель 27, выход которого подключен к одному входу сумматора 25 непосредственно, а к одному входу сумматора 26 через инвертор 28. Исполнительный элемент 29 рыскания платформы связан через интегрирующий узел 30 с датчиком 15. Акселератор 5 и переключатель 6 через масштабный усилитель 31 и ключевой элемент 32 связаны с механизмом 11 модели 2, а датчики 21 и 22 через усилители 33 и 34 соответственно - с механизмами 12 и 13. Механизм 20- связан с датчиком 17 через усилитель 35 мощности и формирователь 36 сигнала возврата кабины 3 в исходное состояние, который
выполнен в виде дифференцирующей цепи.
Платформа (фиг. 2) содержит верхнее 37, среднее 36 и нижнее 39 основания, разделенные между собой шарнирами 40 и роликами 41. Между основаниями 38 и 39 установлены исполнительные механизмы 18 и 19 наклона.
0 На верхнем основании установлен механизм 20, а нижнее связано с исполнительным элементом 42 рыскания.
Устройство работает следующим образом.
г Визуальное изображение участка местности, расположенного перед моделью 2, передается при помощи головки 8 в преобразователь 9 и предъявляется водителю. Обучаемый водитель,
0 находящийся в кабине 3 тренажера, изучает визуальную обстановку местонахождения транспортного средства и по команде преподавателя начинает движение. С этой целью он выжимает
5 педаль, механически связанную с выключателем 7, и при помощи рычага, связанного с переключателем 6, выбирает требуемую передачу движения, задавая тем самым один из коэффициентов
0 усиления для масштабного усилителя 31. Отпуская педаль сцепления и нажимая акселератор 5, обучаемый замыкает выключатель 7, при этом срабатывает элемент 32 и сигнал с выхода акселератора 5, усиленный усилителем 31, поступает на механизм 11 модели 2. При этом модель 2 приводится в движение и начинает перемещаться по макету 1. Обучаемый контролирует
Q траекторию и скорость движения транспортного средства по характеру и динамике изменения визуальных изображений участка местности, при необходимости изменяя положение педали ак5 селератора и рулевого колеса. Сигнал с выхода акселератора 5, изменяясь, меняет скорость вращения двигателя механизма 11, и соответственно скорость движения модели 2. Изменение
Q положения рулевого колеса вызьшает появление сигнала на выходе датчика 22, который после усиления усилителем 33 передается на механизм 13 модели. При этом изменяется угол поворота
g управляемой колесной пары и подвижная модель изменяет направление движения. В случае необходимости замедлить движение или остановиться водитель нажимает на педаль тормоза, свя, - 1
занную с датчиком 21 торможения, через ус1шитель 34 механизм 12 подвижной модели 2. Управление акселератора 5 изменяет сигнал управления генератором 23 и звуковая колонка 24, установленная в кабине 3, имитирует изменение звука работающего двигателя.
Ускорение и торможение подвижной модели 2 контролируется датчиком 17, сигнал с выхода которого через формирователь 36 поступает на усилитель 35 мощности. Последний подает управляющий сигнал на исполнительный механизм 20, реализуя перемещение верх него основания 37 платформы с кабиной 3 вдоль продольной оси кабины с ускорением, по величине и знаку соот ветствующим параметрам имитируемого движения транспортного средства. При исчезновении сигнала на выходе датчика 17 он формирует сигнал, плавно возвращающий верхнее основание 37 платформы с кабиной 3 в исходное (среднее) положение при помощи испол нительного механизма 20,
Изменение направления движения модели 2 контролируется датчиком 15, передающим сигнал отклонения на интегрирующий узел 30, с выхода которо го снимается импульсный сигнал на задействование исполнительного элемента 29. При этом платформа с кабиной 3 поворачивается вокруг вертикальной .оси со скоростью и на угол, соответствующий параметрам имитируемого маневра транспортного средства.
Движение модели 2 по пересеченной местности макета 1 сопровождается ка чаниями и изменениями ее угла наклона по тангажу и крену. Эти изменения контролируются соответствующими датчиками. В случае наклона модели по тангажу с выхода датчика 15 снимается сигнал, пропорциональный углу нак лона, и передается на первые входы сумматоров 25 и 26. Последние при отсутствии сигналов на их вторых вхо дах формируют идентичные сигналы управления, изменяя тем самым линейные размеры исполнительных механизмов 18 и 19, расположенных в вертикальной плоскости, на равные величины. Это вызьшает поворот среднего основания 38 платформы вместе с верхним основанием 37 и кабиной 3 на заданный угол по тангажу вокруг шарнира неподвижной опоры.
65109
Изменение углового положения модели 2 по крену вызывает появление на выходе датчика 14 сигнала, пропорционального углу наклона, распре- 5
деляемого поровну исполнительными
механизмами 18 и 19 путем его деления на два делителем 27 и передачи результата на второй вход сумматора
Q 25 и с измененным знаком при помощи инвертора 28 на второй вход сумматора 26. Такое распределение сигналов вызьшает поворот среднего основания платформы вместе с верхним осно15 ванием и кабиной на заданный угол по крену за счет приращения линейных размеров одного исполнительного механизма, расположенного в вертикальной плоскости, и сокращения на такую же
20 величину линейных размеров другого механизма. Поворот осуществляется вокруг шарнира неподвижной опоры.
В случае одновременных наклонов модели по тангажу и крену сигналы с
25 выходов датчиков 14 и 16 складываются сумматорами 25 и 26, после чего исполнительные механизмы 18 и 19 реалируют сумматорные угловые перемещения кабины, соответствующие пара30 метрам имитируемого движения.
Изменения пространственного положения модели 2 естественным образом изменяют визуальное изображение макета 1 местности при помощи головки 8,
жестко связанной с подвижной моделью. Jo
Формула изобретения
1. Устройство имитации условий
40 движения транспортного средства для
тренажера, содержащее неподвижный макет местности, кабину с органами управления направлением и скоростью движения транспортного средства, ус- . тановленную на платформе с исполнительными механизмами ее наклона, подключенными к каналам формирования сигналов наклона, и считывающий узел, отличающееся тем, - что, с целью повьппения эффективности обучения путем приближения условий движения к реальным, оно снабжено размещенной на неподвижном макете местности моделью транспортного средства с приводами движения и поворота, связанными с органами управления, установленными в кабине, и датчиками крена, рыскания, тангажа и линейного ускорения упомянутой модели, и
25
38
же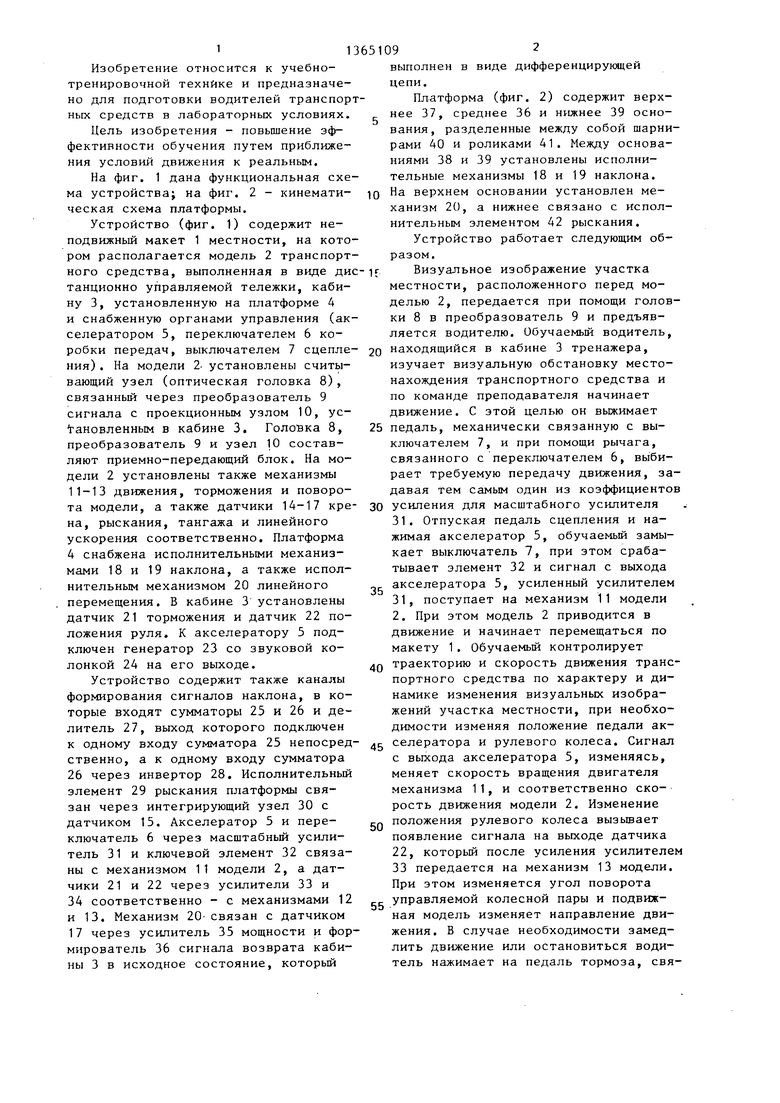
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1990 |
|
SU1798810A2 |
| Устройство для имитации визуальной обстановки в тренажере транспортного средства | 1984 |
|
SU1218416A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| Тренажер транспортного средства | 1977 |
|
SU720471A1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
Изобретение относится к области учебно-тренировочной техники, предназначено для обучения водителей транспортных средств в лабораторных условиях и имеет своей целью повышение эффективности обучения путем приближения условий движения к реальным. Устройство включает в себя установленную на неподвижном макете 1 местности подвижную модель 2 транспортного средства с механизмами 11-13 движения, торможения и поворота, управляемыми дистанционно обучаемым из кабины 3, установленной на платформе 4. Платформа снабжена исполнительными механизмами 18,19 наклона, исполнительным механизмом 20 ее линейного перемещения и исполнительным элементом 29 рыскания, который через интегрирующий узел 20 управляется от датчика 15 рыскания модели 2. Наклон платформы 4 с кабиной 3 формируется по сигналам от датчиков 14 и 16 крена и тангажа модели. Большое число степеней свобод перемещения кабины повышает адекватность имитируемых перемещений и ускорений реальным ловиям движения. 1 з.п. ф-лы, 2 ил. сл
J5
W
фиг. 2
| Устройство имитации условий движения транспортного средства на тренажере | 1976 |
|
SU588553A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
