Изобретение относится к техническим устройствам для обучения водителей транспортных средств.
Цель изобретения - повьшение эффективности работы тренажера за счет повышения-качества имитации динамических воздействий на обучаемого и зрительной обстановки для достижения адекватности тренажера реальному транспортному средству.
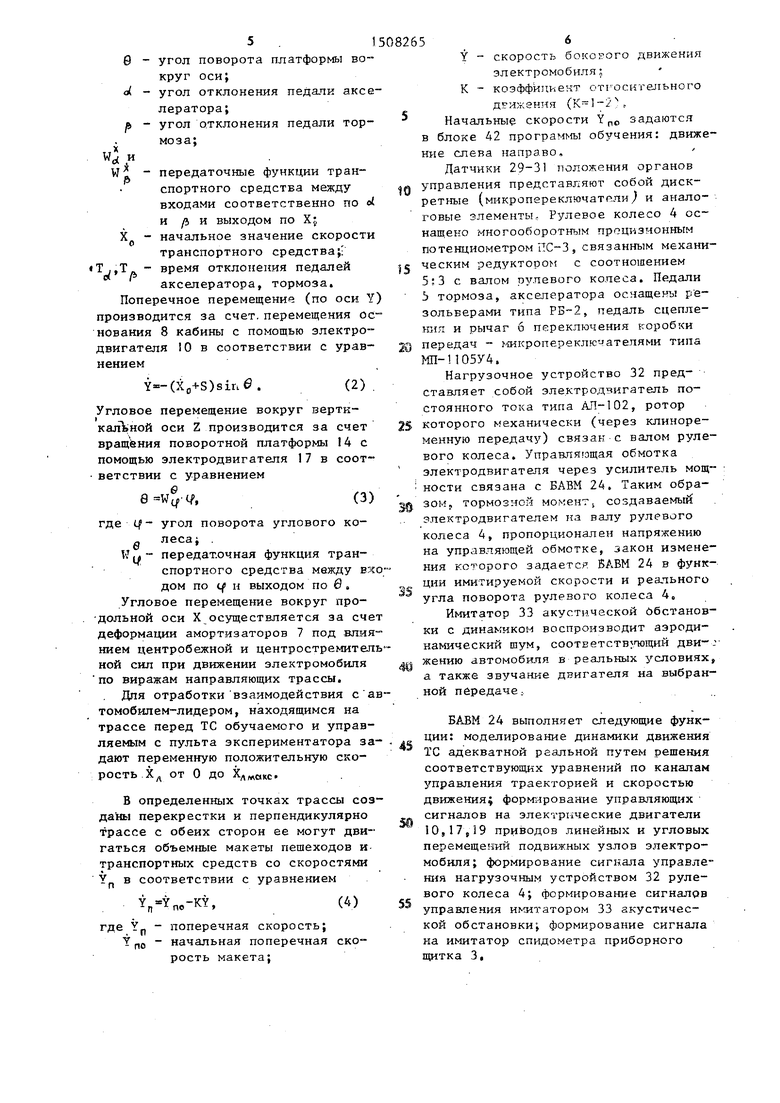
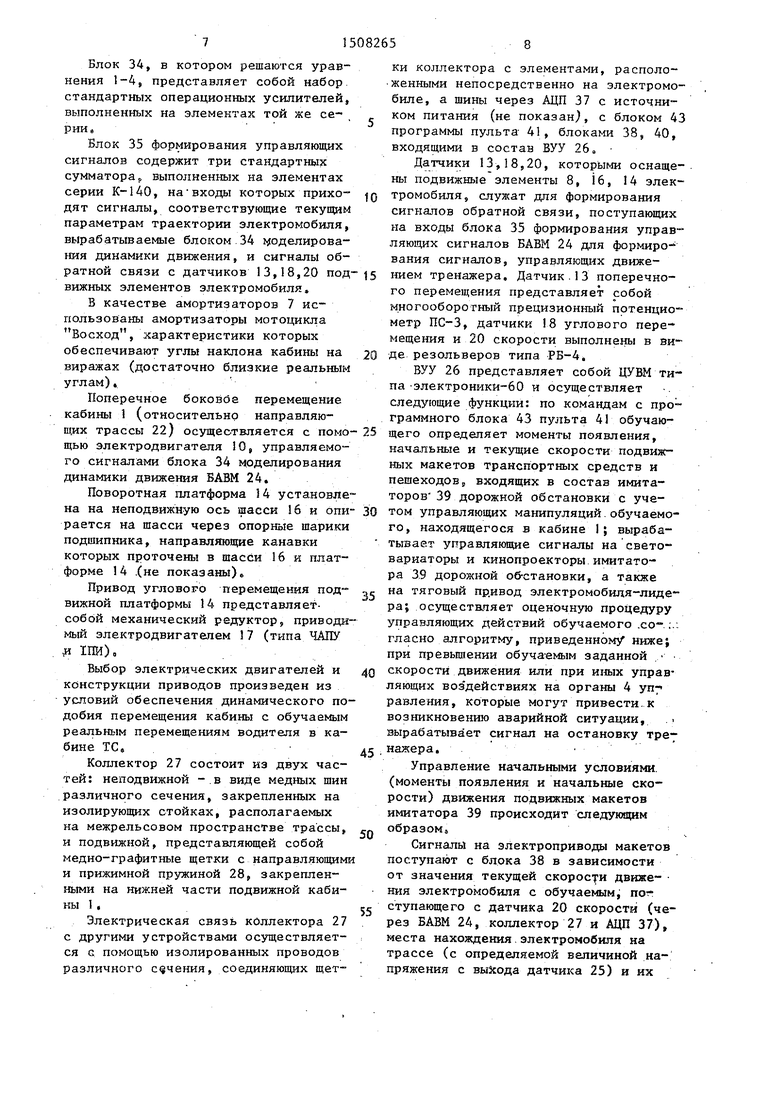
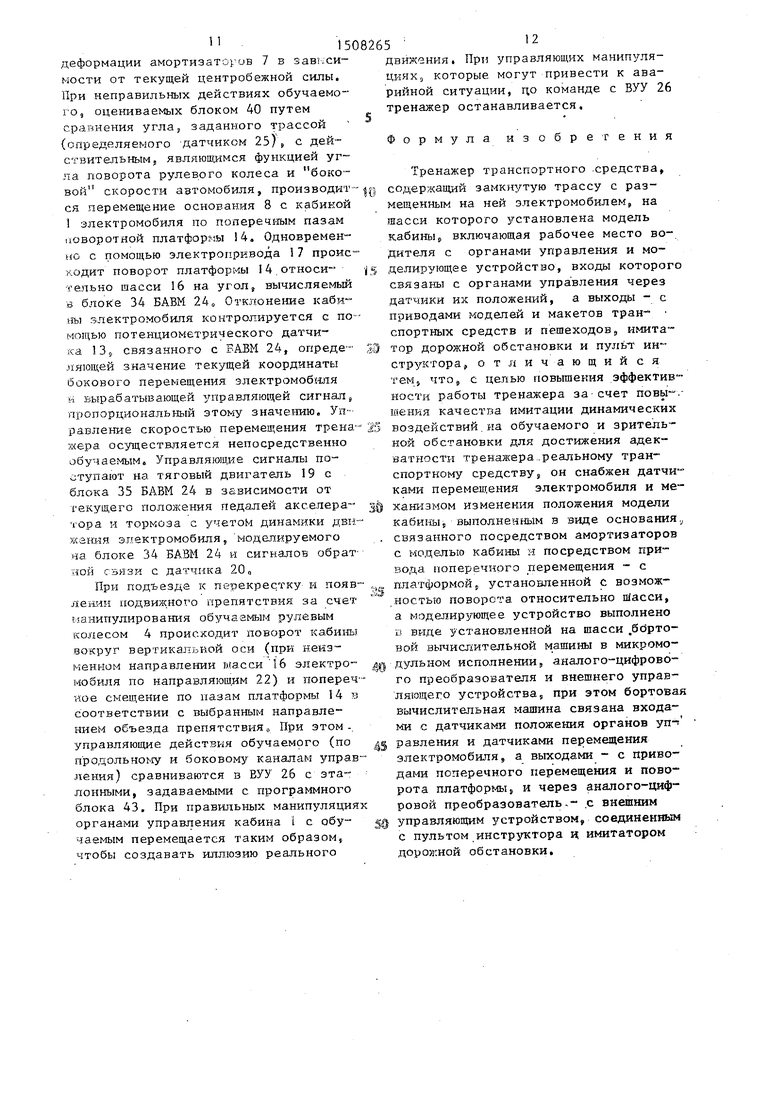
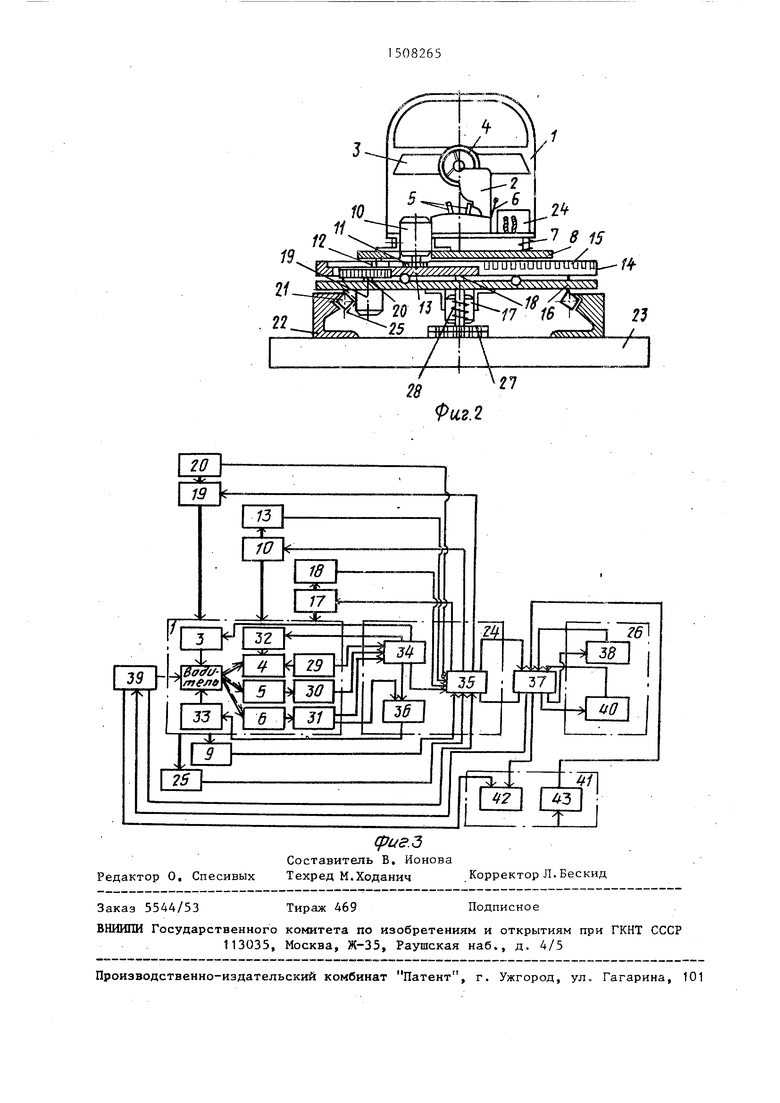
На фиг. 1 представлен общий вид подвижной кабины тренажера; на фиг, 2 - кинематическая с х:ема кабины разрез; на фиг, 3 - структурная блок-схема тренажера.
Тренажер содержит модель кабины 1 транспортного средства, оборудованную креслом 2 водителя, приборным щитком 3 с имитаторами приборов и указателем поворотов, стандартными органами управления, включающими ру левое колесо 4, педали 5 акселератора, тормоза, сцепления и рычаг 6 переключения коробки передач. Кабина 1 установлена посредством четырех амортизаторов 7 на основании 8 с возмолс- ностью ее поворота вокруг продольной ОСИ X в малых отклонениях при движении по наклонной поверхности трассы (например, на виражах) и оснащена датчиком 9 углового положения. Основание 8 оборудовано электромеханическим приводом поперечного перемещения относительно траектории движе- ния, включающим электродвигатель 10 с приводной шестерней 11, четыре опорных ролика 12 и датчик 13 поперечного (вдоль оси Y) перемещения. Ролики 12 входят в продольные фигурные пазы (типа ласточкина хвоста) поворотной платформы 14, в одном из которых нарезана зубчатая рейка (гребенка) 15, находящаяся в зацеплении
o
0
0
циальных уравнений движения транспортного средства и формирования управляющих сигналов на электроприводы и на приборный щиток 3, Кроме того, шасси оборудовано датчиками - щупом 25 со свободно катящимися направляющими роликами для определения местонахождения электромобиля на трассе и угла поворота трассы.
Дпя передачи сигнала с электромобиля на внешние управляющие устройства 26 (ВУУ) служит коллектор 27 с прижимной пружиной 28.
Органы управления 4-6 кабины 1 оборудованы электрическими, датчиками их положения 29-31 (фиг.З), а рулевое колесо 4 дополнительно оборудовано электромеханическим нагрузочным устройством 32. Кроме того, кабина 1 оборудована имитатором 33 акустической обстановки с динамиком,
БАВМ 24 включает в себя блок 34 моделирования динамики движения, блок 5 35 формирования управляющих сигналов на электродвигатели 10, 17, 19, блок 36 формирования сигнала на имитатор 33 акустической обстановки, БАВМ 24 через коллектор 27 связана с АЦП 37, соединенным с внешним управляющим устройством 26, ВУУ 26 включает блок 38 формирования управляющих сигналов имитатора 39 дорожной обстановки и блок 40 контроля действий обучаемого.
Пульт 41 обучающего (инструктора) содержит блок 42 индикации и блок 43 программы обучения, . ,
Кинематическая схема подвижной кабины тренажера обеспечивает 4 степени свободы относительно неподвижного основания. Связанная система 0,X,Y-,Z расположена в центре тяжести моделируемого на тренажере транспортного
0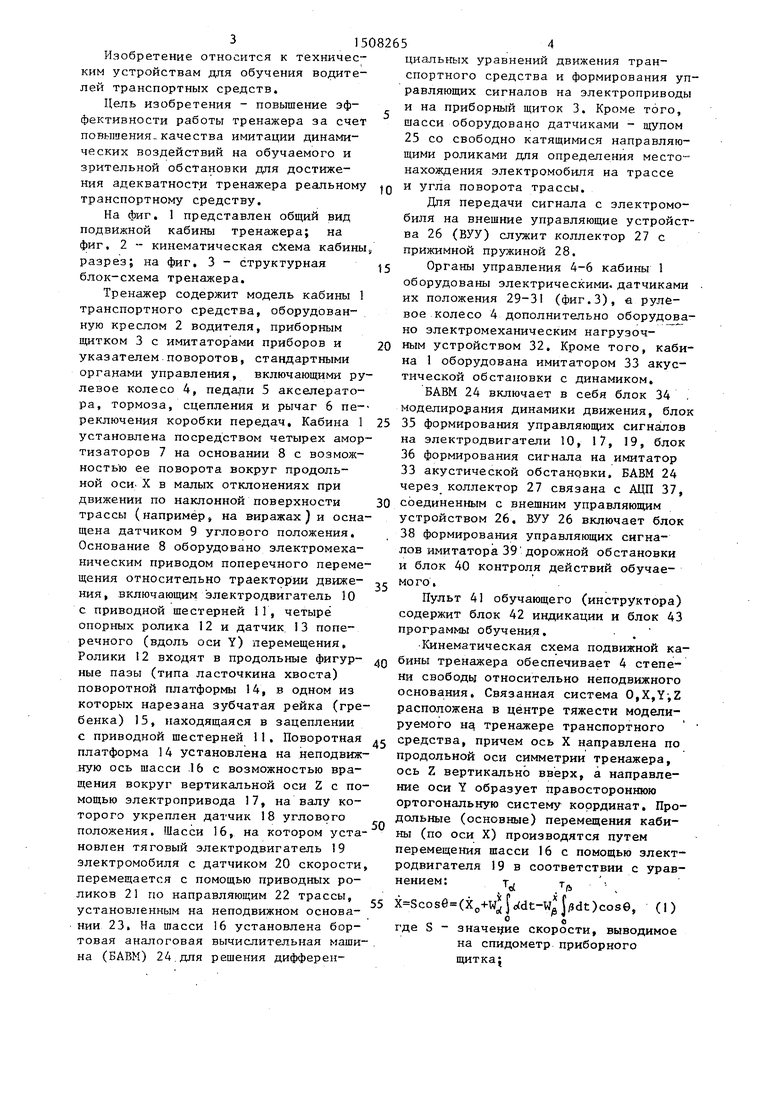
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1978 |
|
SU826394A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Автомобильный тренажер | 1980 |
|
SU963068A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| Устройство для обучения водителей транспортных средств | 1979 |
|
SU896663A1 |
| ИМИТАТОР ДОРОЖНЫЙ ТРЕНАЖЁРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652696C2 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
Изобретение относится к техническим устройствам обучения водителей транспортных средств , в частности, автомобилей. Цель изобретения - повышение эффективности работы тренажера за счет повышения качества имитации динамических воздействий на обучаемого и зрительной обстановки для достижения адекватности тренажера реальному транспортному средству. Кабина электромобиля посредством амортизаторов 7 размещена на основании 8, оборудованном приводом поперечного перемещения относительно траектории движения и установленном на поворотной платформе с возможностью вращения вокруг вертикальной оси, а моделирующее устройство выполнено в виде установленной на шасси электромобиля бортовой вычислительной машины 24 в микромодульном исполнении, аналого-цифрового преобразователя, внешнего управляющего устройства. При этом бортовая вычислительная машина 24 связана входами с датчиками положения органов управления и перемещения кабины, а выходами - с приводами перемещений кабины и через узел токосъема - с внешним управляющим устройством, связанным с пультом инструктора и имитатором дорожной обстановки. При работе на тренажере воспроизводятся более полные к реальной обстановке динамические и информационные воздействия на обучаемого. 3 ил.
с приводной шестерней 11, Поворотная д средства, причем ось X направлена по платформа 14 установлена на неподвиж- продольной оси симметрии тренажера, ную ось шасси .16 с возможностью вращения вокруг вертикальной оси Z с помощью электропривода 17, на валу которого укреплен датчик 18 углового положения. Шасси 16, на котором установлен тяговый электродвигатель 19 электромобиля с датчиком 20 скорости, перемещается с помощью приводных роось Z вертикально вверх, а направление оси Y образует правостороннюю ортогональную систему координат. Продольные (основные) перемещения кабины (по оси X) производятся путем перемещения шасси 16 с помощью электродвигателя 19 в соответствии с уравнением: TW т,
ft
ft
ликов 21 по направляющим 22 трассы, 5X Scose(xX io(dt-wM dt)cose, (I)
установленным на неподвижном основа-о ч /
НИИ 23, На шасси 16 установлена бор-где S - значение скорости, выводимое
товая аналоговая вычислительная маши-.на спидометр приборного
на (БАВМ) 24.для решения дифферен-щитка
средства, причем ось X направлена по продольной оси симметрии тренажера,
ось Z вертикально вверх, а направление оси Y образует правостороннюю ортогональную систему координат. Продольные (основные) перемещения кабины (по оси X) производятся путем перемещения шасси 16 с помощью электродвигателя 19 в соответствии с уравнением: TW т,
ft
X Scose(xX io(dt-wM dt)cose, (I)
0 - угол поворота платформы вокруг оси;
« - угол отклонения педали акселератора;
f - угол отклонения педали тормоза;
W - передаточные функции тран- Р
спортного средства между
входами соответственно по о( и /i и выходом по X; Х - начальное значение скорости
транспортного средства; Т ,,Т - время отклонения педалей
акселератора, тормоза. Поперечное перемещение (по оси Y) производится за счет, перемещения ос нования 8 кабины с помощью электродвигателя 10 в соответствии с уравнением
(X0+5)8 in е.
Угловое перемещение вокруг верти- калЛной оси Z производится за счет вращения поворотной платформы 14 с помощью электродвигателя 17 в соот- ветствии с уравнением
,
где (- угол поворота углового коg леса;
W.- передаточная функция транспортного средства между входом по cf н выходом по 0 . Угловое перемещение вокруг про- дольной оси X осуществляется за счет деформации амортизаторов 7 под влиянием центробежной и центростремитель ной сил при движении электромобиля по виражам направляющих трассы.
Дпя отработки взаимодействия с автомобилем-лидером, находящимся на трассе перед ТС обучаемого и управляемым с пульта экспериментатора задают переменную положительную скорость Хд от О до Хд«,о.кс.
В определенных точках трассы соз- да ны перекрестки и перпендикулярно трассе с обеих сторон ее могут двигаться объемные макеты пешеходов и- транспортных средств со скоростями Ур в соответствии с уравнением
,-KY,(4)
где I
V
поперечная скорость;
fio - начальная поперечная скорость макета;
)
от ь
в-
Y - скорость бокового движения
электромобиля; К коэффициент отг осл гельного
ДРИЖ9КНЯ ( ,
Начальные скорости Y j, задаются в блоке 42 программы обучения: движение слева направо.
Датчики 29-31 положения органов д управления представляют собой дискретные (микропереключатели и говые злементЫе Рулевое колесо 4 ос нащено многооборотным прецизионным потенциометром ПС-3 , связанным механике ческим редуктороь с соотношением 5;3 с валом рулевого колеса. Педали Ь тормоза, акселератора оснащены р е- зольверами типа , педаль сцепле- нля и рычаг б переключения коробки передач ьшкропереклгсчателями типа МП-П05У4.
Нагрузочное устройство 32 представляет собой электродвигатель постоянного тока типа АП-102, ротор 2S которого механически (через клиноре- менную передачу) связан с валом рулевого колеса. Упраапяющая обмотка электродвигателя через усилитель мощ- ности связана с БАВМ 24, Таким обра- зом, тормозной моментJ создаваемый электродвигателем на валу рулевого колеса 4, пропорционален напряжению на управляющей обмотке, закон изменения которого задается БАБМ 24 в функции имитируемой скорости и реального угла поворота рулевого колеса 4,
Имитатор 33 акустической ббстанов- ки с динамиком воспроизводит аэродинамический шум, cooтвeтcтв o ций дви - л« жению автомобиля в реальных условиях, 4У,j
а также звучание двигателя на выбранной передаче;
БАБМ 24 выполняет следующие функции: моделирование динамики движения ТС адекватной реальной путем решения соответствующих уравнений по каналам управления траекторией и скоростью движения форм1-1рование управляющих yg. сигналов на электрические двигатели 10,17,19 приводов линейных и угловых перемещений подвижных узлов электромобиля; формирование сигнала управления нагрузочным устройством 32 рулевого колеса 4; формирование сигналов управления имитатором 33 акустической обстановки; формирование сигнала на имитатор спидометра приборного щитка 3,
sS
Блок 34, в котором решаются уравнения 1-4, представляет собой набор стандартных операционных усилителей, выполненных на элементах той же се- ,
РИИв
Блок 35 формирования управляющих сигналов содержит три стандартных сумматора (, выполненных на элементах серии К-140, на входы которых приходят сигналы, соответствующие текущим параметрам траектории электромобиля, вырабатываемые блоком.34 г оделирова- кия динамики движения, и сигналы обратной связи с датчиков 13,18,20 подвижных элементов электромобиля
В качестве амортизаторов 7 использованы амортизаторы мотоцикла Восход, характеристики которых обеспечивают углы наклона кабины на виражах (достаточно близкие реальным углам).
Поперечное боковбе перемещение кабины 1 (относительно направляющих трассы 22) осуществляется с помощью электродвигателя 10, управляемого сигналами блока 34 моделирования динамики движения БАЕМ 24.
Поворотная платформа 14 установлена на неподвижную ось шасси 16 и опирается на шасси через опорные шарики подшипника, направляющие канавки которых проточены в шасси 16 и платформе 14 .(не показаны)
Привод углового перемещения под вижной платформы 14 представляет- собой механический редуктор, приводимый электродвигателем 17 (типа ЧАДУ Л 1ПИ),
Выбор электрических двигателей и конструкции приводов произведен из условий обеспечения динамического подобия перемещения кабины с обучаемым реальным перемещениям водителя в кабине ТС,
Коллектор 27 состоит из двух частей: неподвижной -.в виде медных шин различного сечения, закрепленных на изолирующих стойках, располагаемых на межрельсовом пространстве трассы, и подвижной, представляющей собой медно-графитные щетки с направляющим и прижимной пружиной 28, закрепленными на нижней части подвижной кабины 1 .
Электрическая связь коллектора 27 с другими устройствами осуществляется G помощью изолированных проводов различного сучения, соединяющих щет
0
5
0
5
0
5
0
5
ки коллектора с элементами, располо- женными непосредственно на электромобиле, а шины через АЦП 37 с источником питания (не показан), с блоком 43 программы пульта 41, блоками 38, 40, входящими в состав ВУУ 26
Датчики 13,18,20, которыми оснащены подвижные элементы 8, Id, 14 электромобиля, служат для формирования сигналов обратной связи, поступающих на входы блока 35 формирования управляющих сигналов БАВМ 24 для формиро- вания сигналов, управляющих движением тренажера. Датчик.13 поперечного перемещения представляет собой многооборотный прецизионный потенциометр ПС-3, датчики 18 углового перемещения и 20 скорости выполнены в виде резольверов типа РБ-4.
ВУУ 26 представляет собой ЦУВМ типа -электроники-бО и осуществляет следующие функции: по командам с программного блока 43 пульта 41 обучающего определяет моменты появления, начальные и текущие скорости подвижных макетов транспортных средств и пешеходовр входящих в состав имитаторов 39 дорожной обстановки с учетом управляющих манипуляций.обучаемого, находящегося в кабине I; вырабатывает управляющие сигналы на свето- вариаторы и кинопроекторы имитатора 3.9 дорожной об-становки, а также на тяговый привод электромобиля-лидера; осуществляет оценочную процедуру управляющих действий обучаемого .со-. ;.: гласно алгоритму, приведенном/ ниже; при превьш1ении обуча-емым заданной . скорости движения или при иных управляющих воздействиях на органы 4 уп7 равления, которые могут привести.к возникновению аварийной ситуации, вырабатывает сигнал на остановку тре ,нажера,
Управление начальными условиями, (моменты появления и начальные скорости) движения подвижных макетов имитатора 39 происходит следующим образом
Сигналы на электроприводы макетов поступают с блока 38 в зависимости от значения текущей скорости движения электромобиля с обучаемым, nor ступающего с датчика 20 скорости (через БАВМ 24, коллектор 27 и АЦП 37), места нахождения электромобиля на трассе (с определяемой величиной напряжения с выхода датчика 25) и их
начальных скоростей, задаваемых программой занятий с блока 43,
ВУУ 26 включает блок 40 контроля действий обучаемого, на выходы которого (через Коллектор 27 и АЦП 37) поступают сигналы с датчиков 29-31 положения органов управления. В блоке 40 контроля производится сравнение текущих манипуляций обучаемого с эталонными, определяемыми выбранной программой обучения. Алгоритм оценки выбран по таким органам управления, как рулевое колесо, педали тормоза и акселератора:
.. т,
По5|Д -ПРИ,
р
Q
п
T, РЭТ РГ
о&ц
ЭТ
де Q. - показатели качества управления;
п.г . - общее число действий обучаемого соответствующим органам управления; ошибочные действия данным органом;
общее время действия .данньш органом управления; эталонная интенсивность действий обучаемого органом управления;
текущая интенсивность действия обучаемого органом управдения,
Дпя сцепления коробки передач и истемы сигнализации значения показаелей Q . рассчитываются как J
о5щ
ош
-сб-щ
Р.Г
р .
где Т
(6)
Tpgrn ТоШ - - rfr -
oSta, ofin
дш - время ошибочных действий.
п.
- Сложность конкретного задания дополнительно оценивается коэффициентом
К- (7)
Т S
где п j - число эталонных действий
органов управления; S - протяженность трассы. Эталонные значения получаются на основе обработки результатов серии проездов по трассе высококвалифицированных инструкторов.
Тренажер работает следующим образом.
Электромобиль с обучаемым, находя- - ния (вплоть до перемены знака ско- щимся в кресле 2 кабины 1, перемеща- рости и полной остановки),
При прохождении закругленной трассы кабина 1 с обучаемым наклоняется
ется по направляющим 22 с регулируемой скоростью внутри затемненной трассы. Программный блок 43 и ВУУ 26
относительно продольной оси за счет
10
«5
(5)
25
35
50
задают обучаемом программу двкженк:: а также различные дорожно-транспортные ситуации 5 например :гнезапное -гор- можение автомобиля-лидера, выезд транспортного средства на перекресток при запрещающем сигнале светофора, неожиданное появление пешехода на проезжей части, С помощью свето- вариатора и имитатора спидометра, установленного в приборном щитке 3, . управляемых соответственно ВУУ 26 и БАВМ 24, достигается иллюзия яовы- шеиной скорости движения. Макеты пешеходов и транспортных средств перемещаются по командам с ВУЗ 26 с учетом управляющих манипуляций обучаемого путем подачи соответствующих сигналов, формируемых блоком 37 на их электрические приводы Имитатор 23, управляемый БАВМ 24, воссоздает акустическую обстановку, адекватную реальной г в зависимости ог параметров имитируемого движения электромобиля с обучаегфш.
Обучаемый имеет возможность объехать появляющуюся помеху справа или слева (исходя из конкретной ситуации) за счет управления относительным движением помехи, причем восприятие этого маневра не отличается от реального из-за высокой степени точности ярименяег «з1х следящих приводов подвижных макетов.
Управление относительным движением макетов (с учетом управляющих действий обучаемого) производится следующим образом6
При появлении макета в поле зрения обучаемого.лрсщедний пытается его объехать, вращая рулевое колесо 4 в ту или иную сторону, либо проскочить (пропустить), воздействуя на педали 5 акселератора (тормоза). При этом сигналы с датчика 29 положения рулевого колеса 4 (либо с датчика 30 положения педалей 3) проходят через соответствующие блоки БАВМ 24 и через коллектор 27 и АЦП 37 поступают на блок 38, где суммируются (по модулю) с сигналами начальной скорости движения макета„ В зависимости от сигнала рассогласования макет увеличивает либо уменьшает скорость движеотносительно продольной оси за счет
деформации амортизатор-ив 7 в завг;си- NsocTH от текущей центробежной силы. При неправильных действиях обучаемого, оцениваемых блоком 40 путем сравнения угла, заданного трассой (определяемого -датчиком 25) с действительным, являющимся функцией угла поворота рулевого колеса и боковой скорости автомобиля, производится перемещение основания 8 с кабиной 1 злектромобиля по поперечным пазам поворотной платфор;мы 4. Одновременно с помощью электропривода 17 проис ходит поворот платформы 14. относи- тельно шасси 16 на угол вычисляемый в блоке 34 БАВМ 24„ Отклонение кабины злектромобиля контролируется с по- мощью потенцнометрического датчи ка 13,, связанного с БАВМ 24, опреде- ляющей значение текущей координаты бокового перемещения электромобх ля и вырабатывающей зтфавляющей сигналj пропорциональный этому значению. Управление скоростью перемещения трена мера осуществляется непосредственно обучаемым Управляющие сигналы поступают на тяговый двигатель 19 с блока 35 БАВМ 24 в зависимости от текущего полол ения педалей ак с ел ер а- Ч Ора и тормоза с учетом динамики двн- жания электромобиля, модел:ируемого на блоке 34 ВАВМ 24 и сигналов обратной связи с датчика 20„
При подъезде к перекрестку и появ-
леаии подвижного препятствия за счет
манипулирования обучаемым рулевым колесом 4 происходит поворот каби1а1 вокруг вертикальной оси (при неиз- NseHHoM направлении шасси 16 электро- мобиля по направляющим 22) и поперечное смещение по пазам платформы 14 в с оответствии с выбранным направлением объезда препятствия,, При этом., управляющие действия обучаемого (по п poдoльнo 4y и боковому каналам управления) сравниваются в ВУУ 26 с эталонными, задаваемыми с программного блока 43. При правильнь Х манипуляциях органами управления кабина 1 с обу-
чаемым перемещается таким образом, чтобы создавать иллюзию реального
движения. При управляющих манипуля- циихэ которые могут привести к аварийной ситуации, до команде с ВУУ 26 тренажер останавливается.
Формула изобретения
Тренажер транспортного .средства, содержащий замкнутую трассу с размещенным на ней электромобилем, на шасси которого установлена модель кабины i, включающая рабочее место водителя с органами управления и моделирующее устройство, входы которог связаны с органами управления через датчики их положений, а выходы - с приводами моделей и макетов транспортных средств и пешеходов 9 имитатор дорожной обстановки и пульт инструктора, отличающийся TeMj 4TOj, с целью повышения эффектив нести работы тренажера за-счет повышения качества имитации динамических воздействий.на обучаемого и зрительной обстановки для достижения адекватности треналсера..реальному транспортному средству, он снабжен датчи ками перемещения электромобиля и механизмом изменения положения модели кабинъ 5 выполненным в виде основаииЯ связанного посредством амортизаторов с модельш кабины н посредством привода поперечного перемещения - с платформой, установленной с возможностью поворота относительно Шасси, а моделирующее устройство выполнено D виде установленной на шасси .бортовой вычислительной машины в микромодульном исполнении, аналого-цифрового преобразователя и внешнего управляющего устройства, при этом бортова вычислительная машина связана входами с датчиками положения органов управлекия и датчиками перемещения электромобиля, а выходами - с приводами поперечного перемещения и поворота платформы и через аналого-цифровой преобразователь.™ с внешним управляющим з стройством, соединенным с пультом инструктора ц имитатором дорожной обстановки.
IjJI- HllfJ -
I /.
| Тренажер транспортного средства | 1978 |
|
SU826394A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
