(5) УСТРОЙСТВО для ВЫДЕЛЕНИЯ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ОБРАЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Устройство для контроля уработки нитей основы и плотности ткани | 1986 |
|
SU1402626A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Акустооптическое устройство для измерения частоты радиосигнала | 1984 |
|
SU1250979A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| Устройство для выделения элементов и контуров изображений объектов | 1980 |
|
SU930326A1 |
| Устройство для распознавания изображений объектов | 1989 |
|
SU1665395A1 |
| Анализатор спектра | 1977 |
|
SU732759A1 |
| РЕЛЕ РАЗНОСТИ ЧАСТОТ | 2002 |
|
RU2222086C1 |
I
Изобретение относится к распознаванию образов, а именно к разделу выделения и кодирования признаков образа, и может быть использовано в системах зрительного восприятия адаптивных роботов.
Известно устройство для выделения признаков при распознавании образов, содержащее матрицу фотоприемников и нескольких слоев аналоговых нейроноподобных элементов с латеральным (боковым) торможением. Элементы в каждом слое группируются таким образом, что каждому из множества их входов соответствует определенный коэффициент связи с другим элементом. Слои соединены между собой на основании заранее заданных характерных зависимостей. Выходы каждого слоя соединены с выходами устройства Я.
Недостаток этого устройства заключается в его конструктивной сложности
Наиболее близким к предлагаемому является устройство, содержащее блок
фотоэлектрического преобразования, приводы которого соединены с блоком управления, а выходы через усилителиограничители и дифференцирующие элементы подключены к сумматору, датчики сигналов синхронизации, соединенные с блоком управления,компараторы, подключенные к соответствующим регистрам, и логический блок 2.
Однако устройство характеризует10ся невысокой надежностью.
Цель изобретения - повышение надежности устройства.
Поставленная цель достигается тем, что в устройство, содержащее
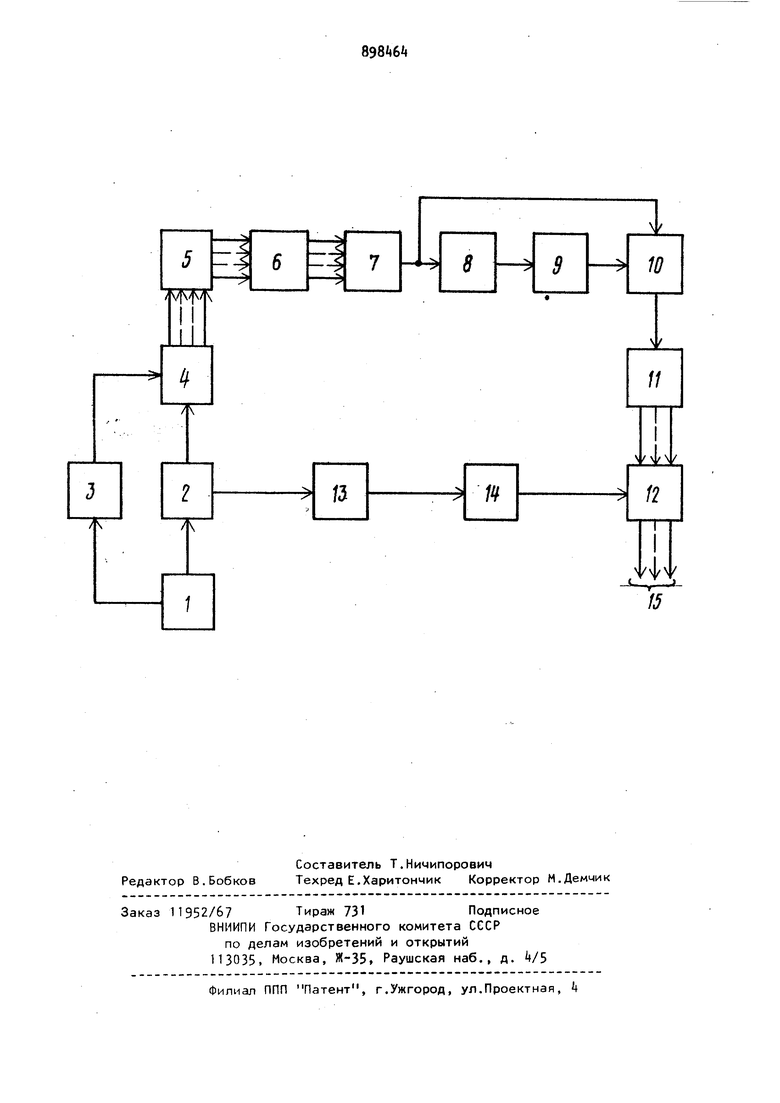
15 усилители-ограничители, соединенные с блоком фотоэлектрического преобразования, приводы которого подключены к блоку управления, сумматор, входы которого соединены с дифферен20цирующими элементами, подключенными к соответствующим усилителям-ограничителям, датчик сигналов, соединенный с приводом блока фотоэлектричес-. 3 кого преобразования, компараторы, подключенные к соответствующим регистрам, выходы которых являются выходом устройства, введены счетчик подключенный к датчику сигналов, и последовательно соединенные элемент задержки, запоминающий элемент И вычитающий элемент, другой вход которого подключен к сумматору, а выход соединен со входами соответст вующих компараторов. На чертеже представлена блок-схема устройства. Устройство содержит блок 1 управ ления, приводы 2 и 3, блок k фотоэлектрического преобразования, выполненный в виде матрицы фотоприемников, усилители-ограничители 5, дифференцирующие элементы 6, сумматор 7, элемент 8 задержки, запомина щий элемент 9, вычитающий элемент 1 компараторы 11, регистры 12, датчик 13 сигналов (угла)и счетчик 1. Устройство работает следующим образом. Блок 1 управления осуществляет операции управления приводами 2 и 3 установки в исходное состояние и синхронизацию работы регистров 12 и счетчика 1+, пуск и остановку устройства. С помощью привода 3 мат рицы k фотоприемников coeepujacT микроколебательные движения (по лиалогии с физиологическим тремором глаз человека и высших животных)в плоскости, параллельной плоскости распо наваемого изображения, в различных направлениях. Изменение направления колебательных движений матрицы осуществляется с помощью привода 2 по командам с блока 1 управления поворотом матрицы k как по часовой, так и против часовой стрелки, дискретно с шагом 5° . Колебательные движения матрицы k фотоприемников приводят к периодическим микроперемещениям изображения на ее элементах. При этом в тех элементах матрицы k, которые пересекают контурные линии изображения , формируются периодически изменяющиеся электрические сигналы, которые усиливаются и ограничиваются усилителями-ограничителями 5. Уровень ограничения усилителей-ограничителей выбран таКИМ, что ширина диаграммы направлен ности каждого элемента матрицы составляет около 10°. Сигналы с выхода усилителей-ограничителей 5 дифференцируются соответствующими элементами 6. Таким образом, элементы 6 пропускают сигналы только с тех элементов матрицы 4, которые пересекают при своих микроперемещениях контурные линии изображения. Эти сигналы суммируются в сумматоре 7 и через элемент 8 задержки поступают на запоминащий элемент 9, где запоминается значение суммарного сигнала при данном направлении микроперемещений матрицы k фотоприемникое. В вычитающем элементе 10 из суммарного сигнала, полученного на данном направлении микроперемещений матрицы k, вычитается суммарный сигнал, полученный на предыдущем направлении микроперемещений. Время задержки, формируемое Б элементе 8 задержки, служит для осуществления устойчивой операции вычитания именно последующего суммарного сигнала из предыдущего и определяется суммарным временем срабатывания вычитающего элемента, компаратора и регистра. Разностный сигнал с вычитающего элемента 10 поступает на входы компараторов 11, где сравнивается с эталонными сигналами. В зависимости от его величины срабатывает компаратор, соот ветствующий наличию определенного признака в изображении на данном направлении микроперемещений матрицы 4 (т.е. с соответствующим эталонным сигналом), Так различным значениям разности соответствуют признаки прямой, дуги окружности и кривой, аналогичной спирали Архимеда, и т.п. Задавая различные пороги срабатывания компараторов, можно настроить устройство на выделение самых разнообразных признаков зрительных образов. Срабатывание каждого компаратора 11 фиксируется соответствующим регистром 12. Одновременно регистрами 12 фиксируется и направление микроперемещений матрицы k, при котором выделен соответствующий признак образа (т.е. код угла, формируемый в счетчике 1 импульсов по сигналам с датчика 13). Кодирование направления колебательных движений матрицы фотоприемников с шагом 5° позволило определять 72 градации направления ориентации линий, что дает возможность выделять признаки кривизны линий (углы, дуги) в широком диапазоне их значений (относительное изменение радиуса кривизны дуг 1-30). Так как признаКИ зрительного образа кодируются величинами приращений сигналов, получаемых при разных направлениях колебательных движений матрицы фотоэлементов, то предлагаемое устройство позволяет осуществлять выделение сложных признаков, каждый из которых имеет свое отличное от других распределение приращений сигналов по прюстранственным координатам образа. Это дает возможность объединить любую комбинацию элементарных признаков в некоторый обобщенный признак, характеризующий тот или иной фрагмент зрительного образа. Предварительное параллельное суммирование сигналов по всем элементам матрицы фотоприемников дает интегральную оценку приращений сигналов, что повышает надежность выделения признаков. , Использование предлагаемого устЬойства обеспечивает увеличение надежности выделения более широкого класса признаков как статических, так и Движущихся образов, инвариантность выделения признаков к размерам и пространственному расположению образа, упрощение процесса распознавания по выделенным признакам.
Формула изобретения Устройство для выделения признаков при распознавании образов, содержащее усилители-ограничителиi соединенные с блоком фотоэлектрического преобразования , приводы которого подключены к блоку управления, сумматор, входы которого соединены с дифференцирующими элементами, подключенными к соответствующим усилителямограничителям, датчик сигналов, соединенный с приводом блока фотоэлектрического преобразования, компараторы, подключенные к соответствующим регистрам, выходы которых являются выходом устройства, отличающееся тем, что, с цельй повы
шения надежности устройства, оно содержит счетчик, подключенный к датчику сигналов, и последовательно соединенные элемент задержки, запоминающий элемент и вычитающий элемент,
другой вход которого подключен к
сумматору, а выход соединен со входами соответствующих компараторов.
Источники информации, принятые во внимание при экспертизе
- 2. Патент США № i 173015, кл. BtO-l fi.i, опублик. 1979 (прототип).
