(54) ПРИВОД ЗАТВОРА СКИПА
| название | год | авторы | номер документа |
|---|---|---|---|
| Секторный затвор | 1981 |
|
SU945048A1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ И ЗАГРУЗКИ СКИПА | 1999 |
|
RU2174094C2 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ СКИПА | 1999 |
|
RU2181689C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ШИБЕРНОГО ЗАТВОРА СКИПА | 1990 |
|
RU2006439C1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ И ЗАГРУЗКИ СКИПА | 1992 |
|
RU2025443C1 |
| Устройство для разгрузки скипа | 1989 |
|
SU1652270A1 |
| УСТРОЙСТВО РАЗГРУЗКИ СКИПА | 2002 |
|
RU2209173C1 |
| Устройство для открывания шиберного затвора скипа | 1976 |
|
SU582170A1 |
| Скип | 1983 |
|
SU1162723A1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ СКИПА | 2008 |
|
RU2372272C1 |
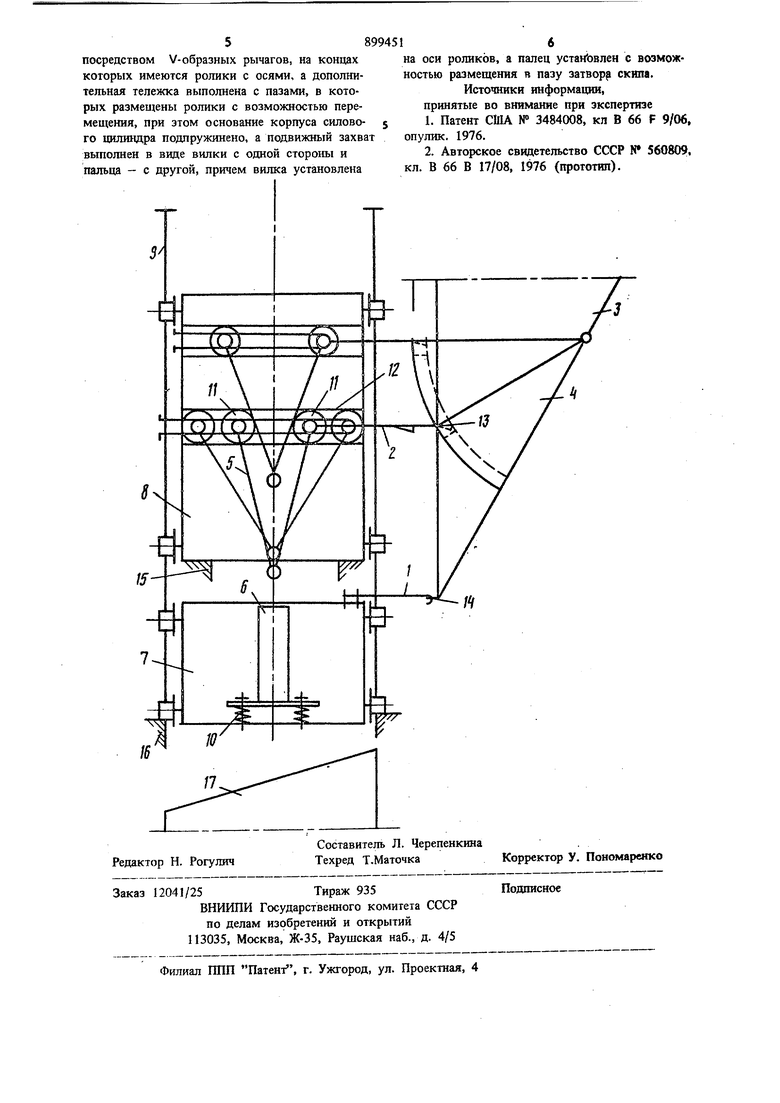
Изобретение относится к горному делу и касается устройства стационарного привода затвора для скипов вертикального подъема. Известен стационарный привод затвора, выполненный в виде силового цилиндра 1. Недостатком такого привода затвора является то, что он обеспечивает открытие только шиберных затворов и не пригоден для работы с секторным затвором. Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство, содержащее два захвата, один из которых неподвижный - контактирует с кузовом или рамой скипа, а другой - подви ный - контактирует с затвором скипа и щарни но связан с рычагами с силовым цилинд| ом, смонтированные на тележке перемещаемой по неподвияшым вертикальным направляющим 2 Недостатком известного устройства является то, что оно обеспечивает принудительного закрытия затворов, что соверщенно необходимо для затворов секторного типа. Цель изобретения - расширение области применения стационарных приводов затворов Эта цель достигается тем, что в приводе затвора скипа, содержащих два захвата, один из которых неподвижный, установленный с возможностью взаимодействия с рамой скипа, а другой - подвижный, установленный с возможностью размещения в пазах затвора скипа и шарнирно связан через рычаги с силовым цилиндром, смонтированным на тележке, перемещаемой по неподвижным вертикальным направляющим, привод затвора снабжен дополнительной тележкой, на которой смонтирован подвижный захват, причем тележки соединены посредством V-образных рычагов, на концах которых имеются ролики с осями, а дополнительная тележка выполнена с пазами, в которых размещены ролики с возможностью перемещения, при зтом основание корпуса силового цилиндра подпружинено, а подвижный захват выполнен в виде вилки с одной стороны к пальца - с другой, причем вилка установлена на оси ро389ликов, а палец установлен с возможностью размещения в пазу затвора CKima. На чертеже изображен фасад предлагаемого привода. Привод затвора содержит два захвата - непода1гжиый I и подвижный 2. Первый коетакти рует с кузовом или рамой скипа 3, второй с затвором 4 скипа 3. Подвижный захват 2 шарнирно связан через рычага 5 с силовым цилиндром 6. Силовой цилиндр 6 и неподвижньш захват расположены на одной тележке 7 а подвижный захват 2 - на другой тележке 8. Причем неподвижностъ захвата 1 и подвижность захвата 2 характеризует возможности их перемещения относительно тележки 7 и тележки 8 соответственно, а также относительно скипа 3. По отношению к копру оба захвата подвижны Обе тележки 7 и 8 перемещаются по вертикальным направляющем 9, неподвижно закреплега{ым на копре, и соединены при помощи рьшагов 5. Рычаги 5 расположены V-образно и об1цим своим концом присоединены к цилиндру 6, основание которого подрессорено посредством 10. Разведешшк в разные стороны верхние концы рычагов 5 оборудованы роликами 11, расположенными между направляющими 12, смонтироватшымй на тележке 8 перпендикулярно направлению ее движения. , На оси ролика 11 со стороны скипа 3 Хмоитироваи подвияаП)п1 захват 2, ОД1Ш конец которого выполнен в виде пальца, контактирующего с пазом 13, в передней стенке затвора 4, а другой его конец выполнен в виде вилки, охватывающей ось противоположного ролика 11. Захват 1 взаимодействует с упором 14, закрепленным на кузове или раме скипа 3.В исходном положении тележка 8 опирается на ограничитель 15 хода, а тележка 7 - на ограничитель 16 хода, смонтированные на копре. Тележку 7 с цилиндром 6 можно располагать над тележкой 8 1шн под ней. Затвор работает следующим образом. При нижнем расположении тележки 7 в исходной позиции она опирается на ограничитель 16 хода, а тележка 8 - на ограничитель 15 хода. Шток цилиндра 6 при этом полностью вдвинут, а пружины 10 разжаты. Скип 3, подходя снизу, захватывает тележку 7, а вместе с ней и весь привод при помощи зпора 14 контактирующего с завхатом . Тележка 8 удерживается над тележкой 7 посредством рычагов 5, подпираемых щтоком шшшщра 6. После того как скип захватил привод, движен их осуществляется совместно. Захват затвора 4,установленного под разгрузку скипа 3, осуществляют при выдвигании штока цил1ШДра 6, раздвиган1Ш рычагов 5 и подаче при этом тптыря захвата 2 в сторону затвора 4 до момента, когда он, войдя в паз 13, упретс В его заднюю стенку. При возрастании усилия на конце упертого в затвор 4 щтыря захвата 2 продолжающейся подаче щтока цилиндра 6 на1шнается движение тележки 8 и затвора 4. При этом сближение роликов 11, требуемое криволинейной траекторией движения рассматриваемого секторного затвора 4, обеспечивают за счет сжатия пруж1ш 10. При открывании затвора щиберного типа сжатие пружин 10 отсутствует, так как tpaeктopия движения такого затвора прямолинейна. Постоянный захват затвора 4 приводом обеспечивает при попеременном и непрекращающемся перемещении штыря захвата 2 и тележки 8. Усилие на щтоке цилиндра 6 выбирается автоматически в зависимости от сопротивления, возникающего со стороны затвора 4. При возрастании усилия перемещается тележка 8, при его снижении штырь захвата 2 подается в направлении затвора 4, чем обеспечивается постоянство захвата затвора приводом. При закрывании затвора осуществляется активный контроль за его движением, т. е. произвол дят операции, аналогичные открыванию, с тем только отличием, что здесь работа привода помогает действию собственного веса затвора 4. Возможность совместного движения привода затвора и скипа 3 исключает аварийные ситуации при переподъеме. Разгрузка скипа может происходить в любой точке запланированной зоны разгрузки. При уходе разгруженного в бункер 17 скипа 3 привод устанавливается в исходное положение для начала нового цикла. Упор 14 монтируется на скипе так, чтобы обеспечивая захват привода при подходе к зоне разгрузки, он не препятствовал уходу скипа вниз. Применение изобретения позволит обеспечить открывание и закрывание шиберных и секторных затворов скипов при автоматическом слежении за движением затвора на всех стадиях его работы в зоне разгрузки. Формула изобретения Привод затвора скипа, включающий два захвата, од}ш из которых - неподвижный, установленный с возможностью взаимодействия с рамой скипа, а другой - подвижный, установленный с возможностью размещения в пазах затвора скипа и шарнирно связан через рычаги с силовым цилиндром, смонтированным на тележке, перемещаемой по неподвижньгм вертикальным направляющим, отличающ и и с я тем, что, с целью расщирения области применения, привод затвора снабжен дополнительной тележкой, на которой смонтирован подвижный захват, причем тележки соединены
