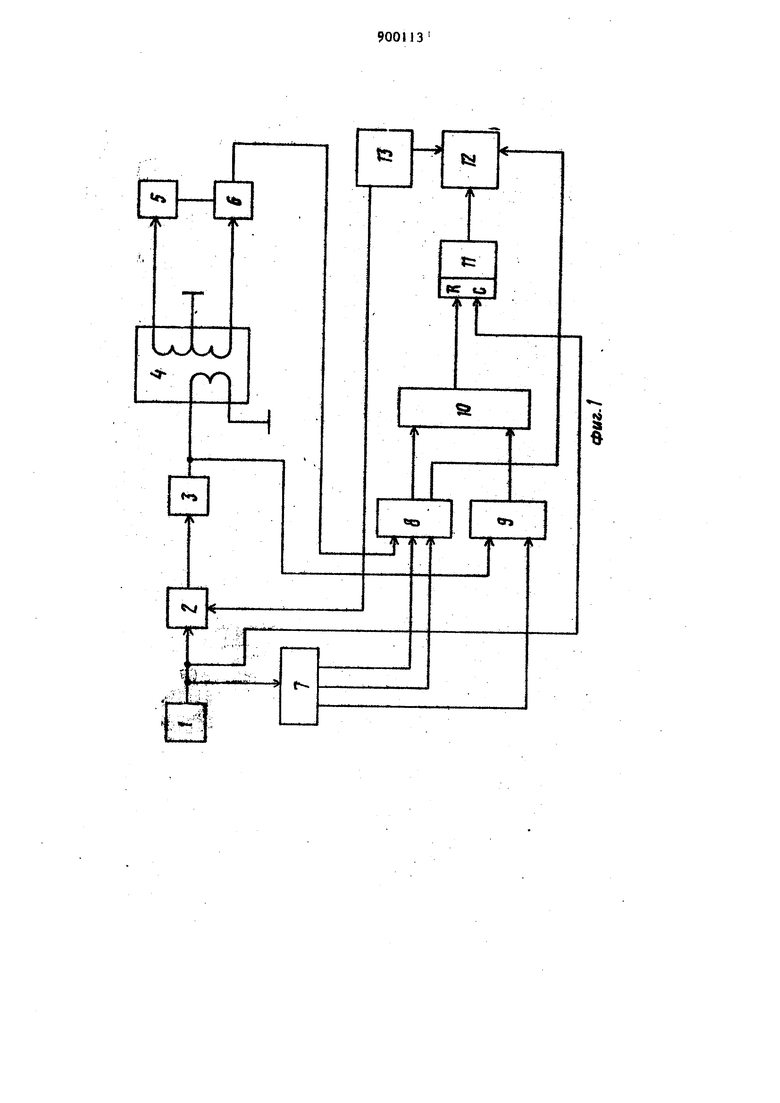
Изобретение относится к навигацион ным приборам, в частностн к электронньм цифровым компасам, и используется в качестве курсоуказателя или преобразователя градусной меры в радианную в бортовых навигационных вычислительных компасах. Известен цифровой компас, используемый в качестве курсоуказателя, со.держащий генератор, магниточувствительный датчик, выполненный на злемейтах Холла, горизонтально расположенный в карданном подвесе, фазовращатель, сумматор, формирователи остроконечных 1шпульсов, преобразователь фаза-интервал и счетчик с выходом на индикатор. В этом компасе сигнал с генератора поступает на один из элементов дат чика непосредственно, а на другой через фазовращатель, фазовый сдвиг которого - 90. Сигналы с элементов датчика поступают на вход сумматора, а с выхода сумматора снимается сигнал амплитуда которого постоянна, а фаза, по отношению к сигналу возбуждения датчика, пропорщюнальна угловому перемещению датчика. Сигналы с выходов сумматора и генератора, (ахдый через свой формирователь остроконечных импульсов , поступают на входы преобразователя фаза-интервал, а с его выхода снимается сигнал, длительность которого пропорциональна угловому перемещению датчика. Затем сигнал с преобразователя поступает в счетчнк, в котором он кодируется и пересчитывается в число импульсов, пропорциональное угловому перемещению датчика f i 3 Недостатком компаса является от-, сутствие возможности представления информации в угловой мере. Наиболее близким к предлагаемому техническим решением является цифровой компас, содержащий генератор, магниточувствктельный датчик, фазовращатель, сумматор, формирователи импульсов, преобразователь фаза-интер- вал и счетчик. Выходы генератора и сумматора через формирователи импульсов и введенные в устройство ячейки И и ИЛИ подклто)чены ко входу сброса в ноль счетчика, причем ко второму вхрду ячейки ИЛИ подключен блок управления 2 . Недостатком компаса является невоз .можность осуществлять измерения полно го угла поворота в любой необходимой системе. Цель изобретения - обеспечение возможности измерения углового перемещения .магниточувствительного датчика в заданной угловой мере. Поставленная цель достигается тем, что цифровой компас, содержащий генератор, магниточувствительный датчик, фазовращатель, сумматор, преобразователь, два формирователя остроконечных импульсов, счетчик и блок управления, снабжен делителем, формирователем последовательностей импульсов, фильтром и блоком памяти, причем выход ге нератора связан с входом формировател последовательностей импульсов, связан с первым входом делителя и ,со вторым входом счетчика, выход делителя через фильтр связан с входом магниточувствительного датчика и первым входом второго формирователя остроконечных импульсов, выход которого связан с вторым входом преобразователя, первый выход формирователя последовательностей импульсов связан с вторым входом второго формирователя остроконечных импульсов, второй и третий выходы свя заны с первым и вторым входами первого формирователя остроконечных импуль сов, первый выход первого формирователя остроконечных импульсов- подсоединен к первому входу преобразователя выход которого подключен к первому . входу счетчика, второй выход магниточувствительного датчика через первый вход сумматора связан с третьим выходом первого формирователя остроконечньпс импульсов, а первый выход связан через фазовращатель с вторым входом сумматора, при этом первый выход блок управления связан с вторым входом де лителя, а второй выход связан с третьим входом блока памяти, к двум другим входам которого подключены выход счетчика и второй выход первого формирователя остроконечных импульсов. На фиг. I представлена блок-схема цифрового компаса, на фиг, 2 - временные диаграммы. Компас содержит генератор I импульсов, делитель 2 с переменным козффициентом деления, фильтр 3 магниточувствительный датчик 4, выполненный на элементах Холла, фазовращатель 5, суммато5 6, формирователь 7 последовательностей импульсов, два формирователя остроконечных импульсов 8 и 9, преобразователь 10 фаза-интервал, счетчик II, блок 12 памяти, блок 13 управления. Электрическая схема компаса работает следующим образом. С выхода генератора 1 на вход делителя 2, формирователя 7 последовательностей импульсов и на вход С счетчика М поступает последовательность прямоугольных импульсов частоты FP . Блок 13 управления задает делителию 2коэффициент деления N;j необходимый 8 данный момент времени, где N - осногамие системы счисления полного угла поворота (градусы, радианы и т.д.); п-порядковый номер основания системы счисления. Сигнал с частотой из делителя 2 поступает на фильтр 3,Где происходит преобразование прямоугольной формы сигнала в синусоидальную. . Сигнал с фильтра 3 поступает на вход магииточувствительного датчика 4,который горизонтально расположен в кардановом подвесе и выполнен в виде двух ортогонально установленных элементах Холла. С одного из этих элементов электрический сигнал поступает на сумматор 6 непосредственно, а с другого - через фазовращатель 5. С выхода сумматора снимается сигнал, амплитуда которого постоянная, а фаза, по отношению к сигналу с фильтра 3, пропорциональна угловому перемещению датчика относительно горизонтальной составляющей магнитного поля Земли. Синусоидальные сигналы с фильтра 3и сумматора 6 (фиг. 2, поз. 14 и 15) поступают на формирователи ост- роконечных импульсов 8 и 9, на другие входы которых с формирователя 7 последовательностей импульсов.поступают три последовательности импульсов (фиг. 2, поз. 16-18), сдвинутые относительно друг друга по фазе. С формирователей 8 и 9 выходят три последовательности остроконечных импульсов, фронты которых привязаны к моментам перехода входного синусоидального сигнала через нуле :; 59 вой уровень в положительном направлении (фиг. 2, поз. 19-21). Причем две такие последовательности (фиг. 2 поз. 19 и 20) поступают на входы пре образователя 10 фаза-интервал, а тре тья - на управляющий блока 12 памяти, тем самьм разрешая запись измеренной величины. С преобразователя 10 фаза-интервал сигнал, представляющий собой импульсную последовательность с частотой длительностью импульса, рав ной рЗзности фаз сигнала с фильтра 3 и сумматора 6 (фиг. 2, позi .22), поступает на обнулякхций вход R счетчика 11, на счетный вход С которого приходит последовательность генерато ра с частотой Рд. За время длительности импульса преобразователя 10 фа за-интервал (фиг. 2 поз. 22J, счетчи II производит подсчет импульсов гене ратора, тем самьм осуществляет преоб разование число-импульсного кода в необходимый информационный , кото рый поступает на вход блока 12 памяти и заполняется в моменты действия разрешающего импульса (фиг. 2, поз. т. е. перед приходом заднего фронта импульса преобразователя фаза-интер|Вал. Отсчет углового перемещения датчи ка в необходимой системе счета возмо жен благодаря выбору коэффициента де ления делителя 2, который задается блоком 13 управления. Частота генератора определяется и условия max NFO - f. ---J / где Рл, - рабочая частотй магниточувст вительного датчика. Остроконечные импульсы, сформированные в моменты перехода сигналов с фильтра 3 и сумматора 6 в положительном направлении, привязаны к двум последовательностям остроконечных импульсов с разными фазами. Это приводит к устраиению эффекта наложения импульсов друг на друга при малых углах изменения курса и следовательно повышает точность отчета. Формула изобретения Цифровой компас, содержащий генератор, магниточувствительный датчик, фазовращатель, сумматор, преобразователь, два формирователя остроконечных импульсов, счетчик и блок управления, отличающийся тем, что, с целью обеспечения возможности измерения углового перенещения магниточув-ствительного датчика в заданной угловой мере, цифровой компас снабжен делителем, формирователем последовательностей импульсов, фильтром и блоком памяти, причем выход генератора связан с входом формирователя последовательностей импульсов, с первым входом делителя и со вторым входом счетчика, выход делителя через фильтр связан с входом магниточувствительного датчика и первым входом второго формирователя остроконечных импульсов, выход которого связан с вторым входом преобразователя, первый выход формирователя последовательностей импульсов связан jC вторым входом второго формирователя остроконечных импульсов, второй н третий выходы связаны с пеовым и вторым входами первого формирователя остроконечных импульсов, первый выход первого формирователя остроконечных импульсов подсоединён к первому входу преобразователя, выход которого подключен к первому входу счетчика, второй выход магниточувствительного датчика через первый вход сумматора связан с третьим входом первого формирователя остроконечных импульсов, а первый выход связан через фазовращатель со вторым входом сумматора, при этом первый выход блока управления связан с вторым входом делителя, а второй выход связан с третьим входом блока памяти, к двум другим входам которогсГ подключены выход счетчика и второй выход первого формирователя остроконечных импульсов. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3197880, кл. 33-204, 1965. 2.Авторское свидетельство СССР 581371, кл. G 01 С 17/32, 26.11.75 (прототип).
И
V/ vy /л /
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой компас | 1975 |
|
SU581371A1 |
| Преобразователь азимута инклинометра | 1981 |
|
SU1002547A1 |
| Устройство для измерения скорости и направления течения | 1987 |
|
SU1520451A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU792276A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU1013998A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1784836A1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |