( УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ДЛЯ ОБРАБОТКИ ПОЛИМЕРНЫХ МАТЕРИАЛОВ
I
Изобретение относится к электротехнике и может быть использовано при обработке полимерных материалов в случаях, когда обработка требует принудительного изменения скорости электроприводов.
Известны устройства управления агрегатами и технологическими линиями, которые выводят упомянутые электроприводы на .заданный технологический режим с постоянным ускорением, построенные на линейных элементах, например потенциометрах.
Известны устройства, изменяющие величину ускорения в переходных ре-, жимах, которые используют разряд емкости или моторизованные сельсины D1.
Указанные устройства имеют общий недостаток - ступенчатое изменение ускорения в начале, а также в конце разгона и торможения управляемых машин.
Наиболее близким к предлагаемому по технической сущности является устройство, содержащее электродвигатель , соединенный через редуктор с сельсином и кулачками, и конечный выключатель 21.
Недостатком известного устройства является то, что оно имеет ступенча- тое изменение ускорения и замедления управляемым электроприводом как
10 в начале, так и в конце переходных режимов. Это ухудшает качество-обрабатываемого материала, а иногда приводит к обрыву последнего.
Указанный недостаток также вынуж15дает увеличивать время выхода электродвигателя на заданный технологический режим при обработке полимерных материалов, что снижает производительность. Кроме того,замедление электродвигателя
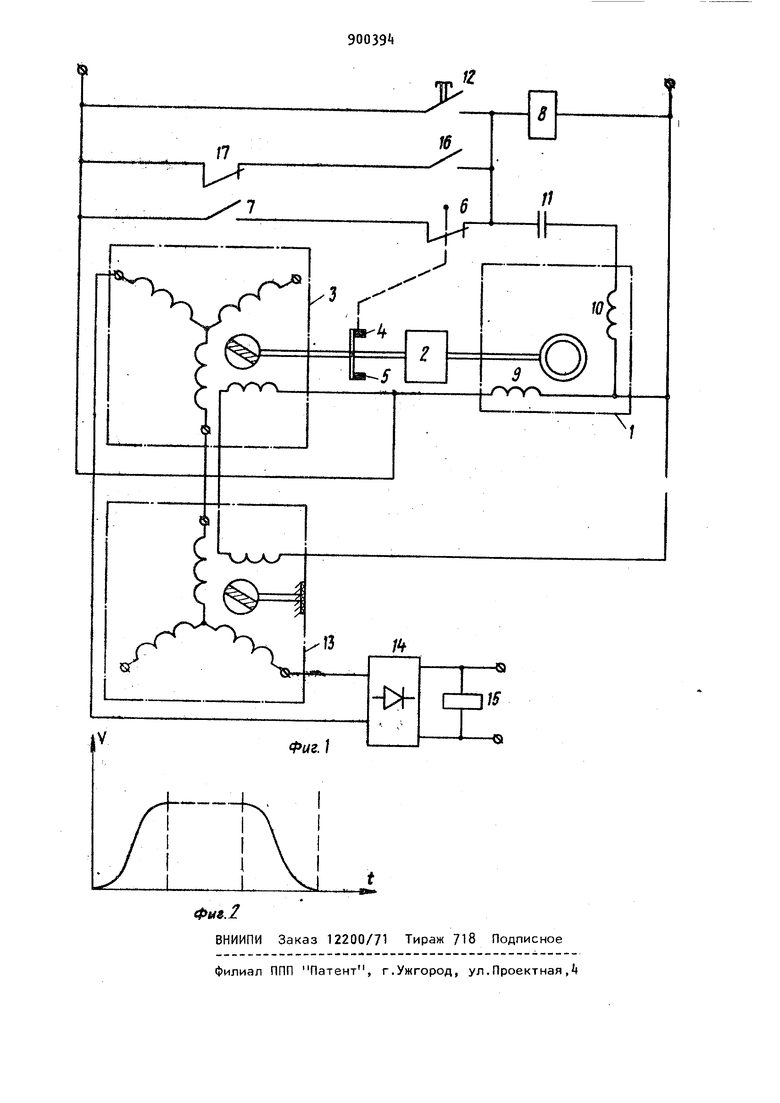
20 требует реверса электродвигателя устройства, что связано с включением ДОПОЛ-. нительной коммутационной аппаратуры снижающей надежность. 3Э Известно, что оптимальным законом управления в данном случае является закон с ограничением 1-й и П-й производной, т.е. S-образный закон, который обеспечивает плавное изменение ускорения и замедления материала при его обработке. Цель изобретения - увеличение производительности указанных машин и повышение качества обработки полимернь1х материалов. Эта цель достигается тем, что в устройство вводится второй сельсин с жесткой связью статора и ротора в положении максимального напряжения двух синхронизирующих обмоток, соеди ненных с аналогичными обмотками первого сельсина, ротор которого соединен с двумя взаимно расположенными под 180°кулачками, связанными с конечным выключателем в положении максимального напряжения включенной пары синхронизирующих обмоток первого сельсина. На фиг. 1 представлена схема устройства управления электропривода ми для обработки полимерных материалов; на фиг. 2 - зависимость изменения скорости обрабатываемого материа ла от времени. Устройство состоит из приборного электродвигателя 1, соединенного через редуктор 2 с ротором сельсина 3 На выходном валу редуктора закрепле ны кулачки и 5, связанные с конеч ным выключателем 6 в положении, соответствующем максимальному напряже нию двух синхронизирующих обмоток. Кулачки смещены относительно друг друга на iSo. Выключатель 6 соедин последовательно с самоблокирующим контактом 7 катушки реле 8, включаю щим электродвигатель 1. Электродвигатель 1 одной обмоткой 9 включен в сеть постоянно, а вторая обмотка 10 через фазосдвигающую емкость 11 включается в сеть с помощью кнопки 12. Ротор и статор сельсина 13 жестко соединены между собой в положении максимального напряжения двух обмоток, которые в свою очередь соединены с обмотками сельсина 3 и выпрямителем И. Обмотки возбуждения обоих сельсинов включены последовательно. На выходе выпрямителя 1+ включено реле 15, а его контакт 16 совмест но с линейным контактом 7 предна; начены для возврата устройства в исходное положение при внезапных остановках машины. Устройство работает следующим образом. В исходном положении управляющая обмотка 10 электродвигателя 1 отключена, а выходное напряжение воздействующих синхронизирующих обмоток сельсина 3 максимально по амплитуде и находится в противофазе напряжению включенных обмоток сельсина 13. Кулачок , связанный с конечным выключателем 6, разрывает цепь реле 8. При нажатии на кнопку 12 получает питание реле 8 и управляющая обмотка 10 электродвигателя 1. Конечный выключатель 6 вместе с самоблокирующим контактом 7 шунтируют кнопку. Электродвигатель будет вращать ротор сельсина 3. Так как в начале уменьшение амплитуды напряжения сельсина 3 будет плавным и незначительным, то и рост результирующего напряжения также будет плавным. При повороте ротора на 90° на выходе сельсина 3 напряжение будет равно нулю, а результирующее напряжение равно максимальному напряжнию двух обмоток сельсина 13- При дальнейшем повороте ротора выходное напряжение сельсина 3 меняет фазу на 180° и складывается с напряжением сельсина 13.При угле поворота ротора, близким к 180 , рост напряжения сельсина замедляется, что обеспечивает плавное уменьшение ускорения. По достижении угла поворота 180 кулачок 5, взаимодействуя с конечным выключателем 6, обесточивает реле 8. Размыкается контакт 7 и отключается электродвигатель. При повторном нажатии на кнопку 12 произойдет замедление скорости материала (без реверса двигателя) до нуля с плавным изменением ускорения. Изменение управляющего напряжения Uy будет происходить согласно уравнению ,l+S,(wt - -|) , где максимальное линейное напряжение одного сельсина; скорость вращенил ротора сельсина, рад/с; время от момригэ работы устройств;), с. 59 Результирующее напряжение, опреде ляющее скорость материала, подается на выпрямитель 14. Реле 15, включенное на выходе выпрямителя своим контактом 16, с помощью линейного контакта 17 обеспечивает возврат устройства в исходное положение при внезапном отключении машины. Учитывая современную тенденцию к созданию поточных технологических линий для обработки полимерных материалов и повышение рабочих скоростей обработки, применение предлагаемого устройства обеспечивает повышение ка чества обработки за счет исключения скачкообразного материала, а также позволяет сократить время разгона и замедления, что повышает производи тельность машин данного класса. Кроме того, предлагаемое устройство повышает надежность управления за счет исключения реверса приборного электродвигателя. Особенно эффективно устройство на электроприводах с циклическим режимом работы, например, на электроприводах сборочных станков. Формула изобретения Устройство управления электроприводами, для обработки полимерных материалов, содержащее электродвигатель, соединенный через редуктор с сельсином и кулачками, и конечный выключатель, отличающеес я тем, что, с целью увеличения производительности управляемых машин и повышения качества обработки полимерных материалов, введен второй сельсин с жесткой связью статора и ротора в положении максимального напряжения двух синхронизирующих обмоток, соединенных с аналогичными обмотками первого сельсина, ротор которого соединен с двумя взаимно расположенными под углом 180 кулачками, , связанными с конечным выключателем в положении максимального напряжения включенной пары синхронизирующих обмоток первого сельсина. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР W 173289, кл. Н 02 Р 7/58, 196. 2.Иванов Г.М., Онищенко Г.Б. Автоматизированный электропривод в химической промышленности. Машиностроение, 1975, с. 260, 261.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электропривода постоянного тока | 1981 |
|
SU964937A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1967 |
|
SU205920A1 |
| Устройство для автоматического удержания вала насосного агрегата | 1981 |
|
SU1029364A1 |
| Электропривод трубопроводной запорной арматуры с устройством для защиты электродвигателя от аварийного режима | 1989 |
|
SU1661903A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Способ динамического торможения шахтных подъемных машин с асинхронным приводом | 1957 |
|
SU109478A1 |
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |