Устройство относится к средствам механизации графических работ, в частности к приборам для вычерчивания ряда кривых 3-го и k-ro порядков и может быть использовано в проектных и конструкторских организациях при конструировании поверхностей тонкостенных покрытий. Кроме того, оно может быть использовано в учебных целях в высших и средних технических учебных заведениях. Известен механизм для преобразова ния окружности в кривые Зго и t-ro порядка, содержащий шарнирно установ ленный на основании кривошип, неподвижную попр-авляющую с ползуном, связанным с траверсой, кулису с двумя ползунами, один из которых шарнирно связан со свободным концом кривошипа а второй шарнирно установлен на основ НИИ, и рычаг, связанный с траверсой крестообразным ползуном, несущим пишущий штифт J. Недостатки известного прибора невозможность настройки его для преобразования окружности в несимметричные кривые и невозможность преобразования окружности в кривую с разными параметрами. Цель изобретения - расширение диапазона решаемых задач и упрощение настройки. Для достижения этой цели механизм, содержащий шарнирно установленный на основании кривошип, неподвижную направляющую с ползуном, связанным с траверсой, кулису с двумя ползунами, один из которых шарнирно связан со свободным концом кривошипа, а второй шарнирно установлен на основании, и рычаг, связанный с траверсой крестообразным ползуном, несущим пишущий штифт, имеет закрепленный на траверсе переставной ползун, шарнирно связанный с кулисой, траверса имеет дугообразную прорезь и соединена с ползуном направляющей при помощи
390
штифта, установленного в центре прорези, и винта, размещенного в дугообразной прорези, в основании выполнены три горизонтальные прорези, в одной из которых закреплены неподвижный шарнир кривошипа и шарнир ползуна кулисы, в двух других - неподвижная направляющая, а кривошип выполнен телескопическим.
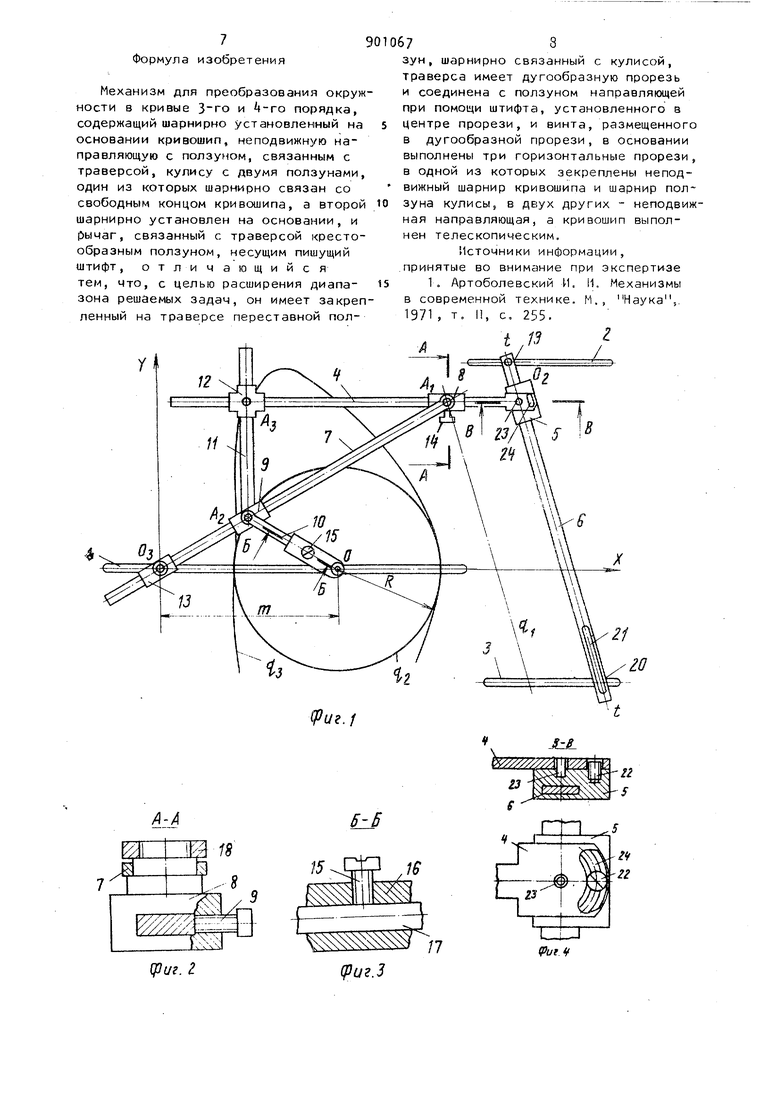
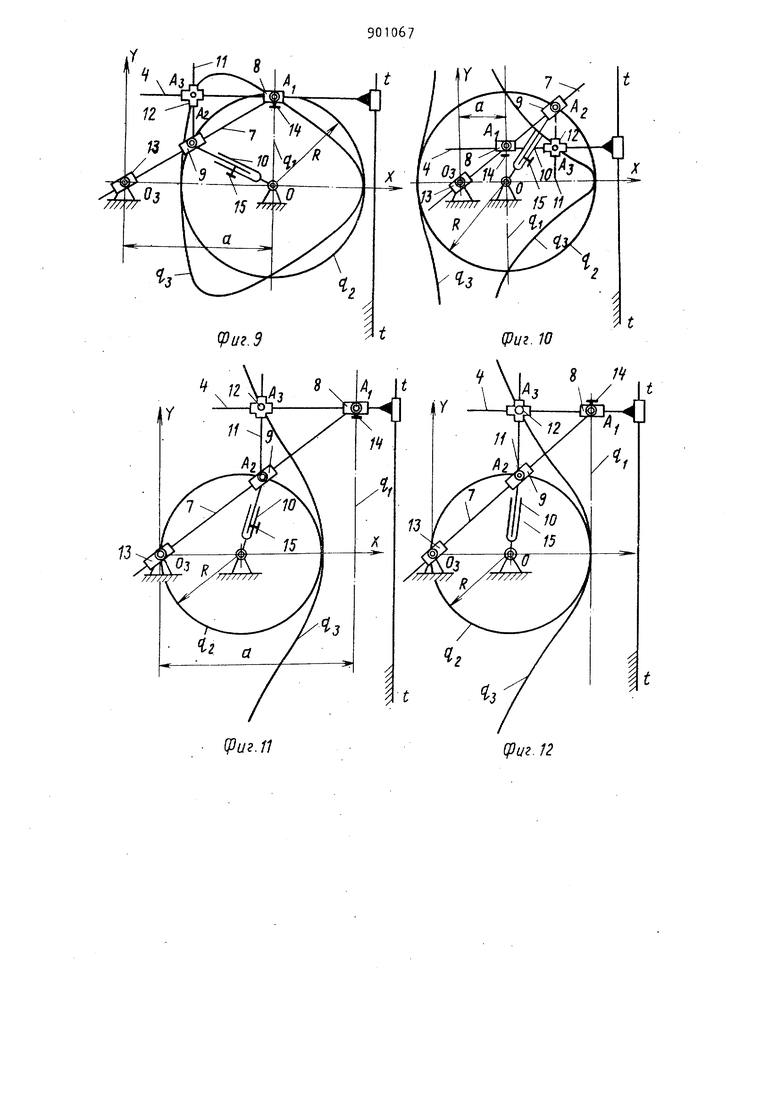
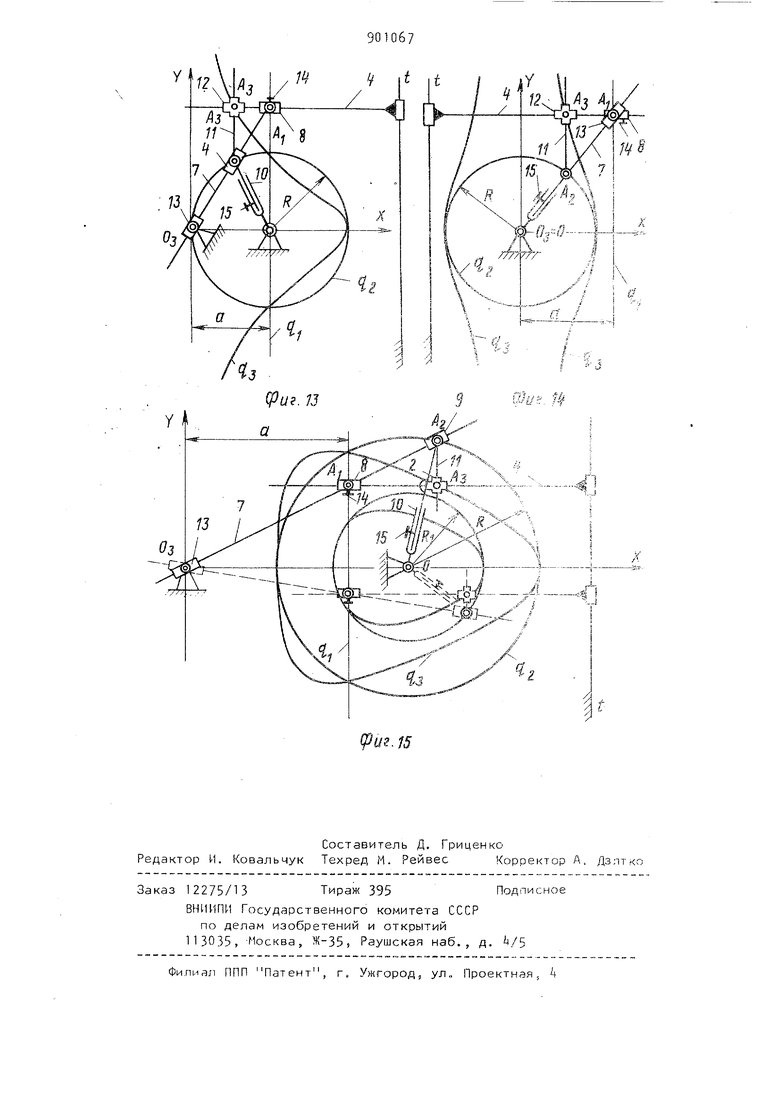
На фиг. 1 изображен предлагаемый механизм,вид сверху; на фиг.2 - разрез А-А на фиг. 1 (узел А; ); на фиг. 3 разрез Б-Б на фиг, 1 (устройство телескопического кривошипа); на фиг. Ц - разрез В-В на фиг о 1; на фиг. 5-7 приведены схемы преобразования окружности, причем на фиг. 5 в несимметричную кривую -го порядка; на фиг. 6 - в симметричную кривую -го порядка; на фиг, 7 в симметричную кривую Зто порядка;. на фиг. 8-15 изображены кинематические схемы механизма для преобразования окружности; на фиг. 8 - в несимметричную кривую -го порядка; на фиг. 9 и 10 - в симметричную кривую 4-го порядка (агвинею Ньютона ); на фиг. 11 - в кривую порядка (аньезиану ); на фиг. 12 - в верзиеру (локон Аньези); на фиг. 13 - EI псевдоверзиеру; на фиг. 1 - в конхоиду Кйльпа, на фиг. 15 в кривую 4-го порядка с различными параметрами.
Предлагаемый мexaниз имеет неподвижное основание, состоящее из трех сквозных прямолинейных горизонтальных прорезей 1-3- Траверса 4 через ползун 5 подвижно связана с неподвижной направляющей 6 (t - t) (фиг,1). Кулиса 7 шарнирно соединена с траверсой k в точке А переставным ползуном 8. Ползун 9 кулисы 7 образует в точке А 2 вращательные пары с кривошипом 10 и рычагом 11. Траверса 4 и рычаг 11 подвижно связаны в точке АЗ крестообразным ползуном 12„ Ползун 13 кулисы 7 и кривошип 10 подви)(но связаны с основанием в точках О- и О с помощью переставных шарниров, жестко закрепленных в прорези 1 Переставной ползун 8 фиксируется на траверсе 4 винтом 14 (фиг 2). Кривошип 10 (фиг. 1 ) имеет телескопическую конструкцию (состоит из двух, вставленных друг в друга частей) , По.сле установки кривошипа заданной длины R винтом 15 обе части 16 и 17 (фиг. 3) жестко скрепляются. Ползун
74
В шарнирно соединяется с кулисой / гайкой 18 (фиг. 2). Направляющая 6 жестко закреплена на основании под углом к прорези 1 с помощью пальцев
19 и 20, вставленных в прорези 2 и 3. Этому способствует прорезь 21 в направляющей 6, Траверса 4 винтом 22 жестко соединена под углом с ползуном 5 (фиг 1 и 4). Ползун 5 снабжен
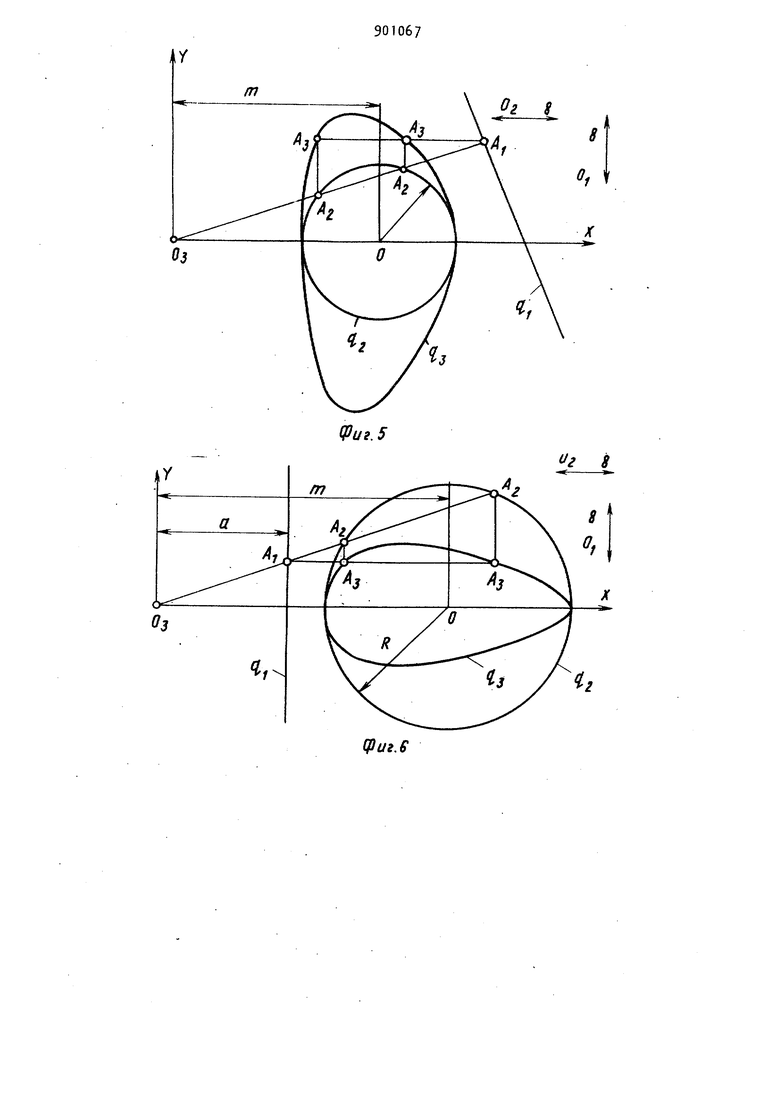
штифтом 23. Траверса имеет сквозной паз 24, выполненный в виде полуокружности с центром, совпадающим с осью штифта 23, которая пересекается с геометрической осью направляющей 6, На фиг о 5 показано преобразование окружности д радиуса R в кривую 4-го порядка. Ось преобразования д. представляет прямую вида А + By + + С 0. Центры преобразования О
и 0-2, несобственные точки, 0 - собственная. Это преобразование Маклорена. Уравнение преобразования кривой д,, относительно декартовой системы координат X Qi имеет вид
( By+C)( А X у ОЛ1)
где А, В, С с m i R - параметры аппарата преобразоваь:ия.
Придавая различные значения параметрам, получают большой набор кривых линий с Так, если В О, а, получают симметричную относительно оси X кривую 4-го порядка, называемую агвинеей Ньютона (фиг. 6)
2. а 2- 2 iа, 2. 2
ах +х у -2а тх+а (т -R ) О (2)
При m R, т.е., если центр 0 принадлежит преобразуемой окружности g кривая g, четвертого порядка С 1) распадается на кривую Зто порядка вида
2- 2. () (x-2R) А ху 0 (3 )
и ее асимптоту х 0.
При В О, С/А-- а из ( 3 ) получают семейство кривых типа верзиер (фиг. 7)
о 72 ,2 ... ., 2
ax-t-xy
Овеществление в материале модели аппарата преобразования приводит к получению 8-звенного механизма для преобразования окружности в кривые и 4-го порядка (фиг. 1). На фиг, 8 приведена кинематическая схема механизма для воспроизведения несимметричных, а на фиг. 9-15 - си метричных кривых. Механизм работает следующим образом. Закрепляют основание с прорезями 1 - 3 на чертежной доске. В прорези 1 wecTKO фиксируют шарниры О и Оа, а в прорезях 2 и 3 закрепляют направля ющую 6 (t - t) (фиг.1 ). При движении траверсы Ц кулиса 7, входящая во вра щательные пары с ползунами 9 и 13, пepeмell aeтcя, вращаясь вокруг оси А. При этом кривошип 10, образующий вращательные пары с ползуном 9 и рычагом 11 вращается вокруг Неподвижн й оси. Рычаг 11, перемещаясь, приводит в движение ползун 12, а пишущий штифт, вставленный в А-,описывает кривую Qj, в которую преобразуется окружность д радиуса R, описываемая осью шарнира Aj.. Ось шарнира А перемещается по оси преобразовани Настройка механизма для воспроизведения кривых разного вида и с раз, ными параметрами проста. При заданных параметрах R, m и оси преобразования д(фиг, 5),уравнение которой Ах + By 4- С О (А, В и С - постоянные) настройка механи ма сводится к следующему. Геометрическая ось прорези 1 совмещается с координатной осью х. Переставной шарнир ползуна 13 (фиг.1 в прорези 1 фиксируется так, чтобы его ось совпала с началом координат Oj. Шарнир О фиксируется на расстоянии m от точки О. Части 16 и 17 кри вошипа 10 скрепляют винтом 15 так, чтобы его длина стала равной R. Перемещая пальцы 19 и 20 в прорезях 2, 3 и 21, устанавливают направляющую 6 по угломер к оси X (- А/В К tg ) и закрепляют ее неподвижно с помощью пальцев 19 и 20. Поворотом вокруг штифта 23 траверсу А устанавливают параллельно оси х и жестко фиксируют на ползуне 5 винтом 22 (фиг. 1 л k}. Ползун 8 с помо щью винта закрепляют так чтобы ось шарнира пересекалась прямой д. Механизм настроен для преобразования окружности gj в кривую д. Кинематическая схема настроенного, механизма показана на фиг. 8. В зависимости от значения параметров преобразования R, т, А, В и G (фиг.8 механизм воспроизводит семейство пропорциональных подобных или соприкасающихся в одной точке кривых. На фиг. 9 приведена кинематическая схема механизма для преобразования окружности в симметричную кривую k-ro порядка (2) - агвинею Ньютона. На фиг. 10 показан механизм, воспроизводящий агвинею Ньютона, когда ООа а R. Настройка механизма (фиг. 9 иIjO) осуществляется аналогично описанной. Отличием является то, что направляющая t - t параллельна оси i), а траверса k параллельна оси X. Механизм (фиг. 8) воспроизводит несимметричные кривые 3-го порядка (3) при 00,j . R.Если в механизме, настроенном для воспроизведения агвинеи Ньютона (фиг. 9 и 10), выдержать условие 005 R, то он воспроизводит семейство верзиер (фиг. 7). При а 7 2R пишущий штифт механизма писывает семейство аньезиан (фиг.11), при а 2R - локон Аньези (фиг.12) уравнением ( у)х - 8R о (5) Если механизм воспроизводит емейство псевдоверзиер,а при а R севдоверзиеру (фиг. 13) с уравнением ( у)х - 2R О (6) При 00з О (фиг. 9) механизм тановится 6-звенным (звенья 9 и 10 ри.этом излишни) и вычерчивает сеейство конхоид Кюльпа (фиг. И) с уравнением 2. а 2. У )х - а R При а R механизм преобразует кружность д в конхоиду Кюльпа дУ)х - R На фиг. 15 приведена кинематичекая схема механизма, воспроизводяего агвинею Ньютона с различным пааметром R. Применение предлагаемого механиза позволяет значительно расширить иапазон решаемых задач, что очень ажно .при конструировании поверхнотей оболочек, включающих 8 себя переисленные выше кривые. Формула изобретения Механизм для преобразоваиизч окруж ности 8 кривые и -го порядка, содержащий шарнирно установленный на основании кривошип, неподвижную направляющую с ползуном, связанным с траверсой, кулису с двумя ползунами, один из которых шарнирно связан со свободным концом кривошипа, а второй шарнирно установлен на основании, и рычаг, связанный с траверсой крестообразным ползуном, несущим пишущий штифт, отли ч ающий с я тем, что, с целью расширения диапазона решаемых задач, он имеет закреп ленный на траверсе переставной пол78зун, шарнирно связанный с кулисой, траверса имеет дугообразную прорезь и соединена с ползуном направляющей при помощи штифта, установленного в центре прорези, и винта, размещенного в дугообразной прорези, в основании выполнены три горизонтальные прорези, в одной из которых зекреплены неподвижный шарнир кривошипа и шарнир ползуна кулисы, в двух других - неподвижная направляющая, а кривошип выполнен телескопическим. Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. 11. Механизмы в современной технике. М., Наука,, 1971 , т. II, с, 255.
дзиг. г
(риг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для воспроизведения виртуальной параболы Крамера | 1983 |
|
SU1094758A1 |
| Прибор для вычерчивания кривых 3-го порядка | 1972 |
|
SU686904A1 |
| Прибор для вычерчивания кривых 3-го и 4-го порядков | 1974 |
|
SU686906A1 |
| Прибор для воспроизведения эллипса и гиперболы | 1980 |
|
SU901069A1 |
| Прибор для черчения и огибания кривых | 1990 |
|
SU1818256A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| Чертежный прибор | 1980 |
|
SU895723A1 |
| Механизм для воспроизведения лемнискаты Жероно | 1981 |
|
SU992234A1 |
| Прибор для вычерчивания кривых 2-го порядка | 1976 |
|
SU682395A1 |
| Шарнирно-рычажный механизм для воспроизведения кривых | 1983 |
|
SU1113284A1 |

Оз
/ 8
г
Cpui.6
EL
U.11
(риг. П
