(54) СИСТЕМА ВНЕШНЕЙ ИНФОРМАЦИИ
РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА ХОЛОДНОЙ
ЛИСТОВОЙ ШТАМПОВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1983 |
|
SU1120283A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1970 |
|
SU264191A1 |
| ДЕФЕКТОСКОП | 2008 |
|
RU2375702C1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Оптико-электронное помехоустойчивое измерительное устройство | 1989 |
|
SU1716324A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ РАКОВЫХ ТКАНЕЙ | 2007 |
|
RU2357771C1 |
| Устройство для контроля подачи листовой заготовки | 1990 |
|
SU1756148A1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| Устройство для обнаружения дефектов поверхности | 1987 |
|
SU1548725A1 |
1
Изобретение относится к обработке металлов давлением и может быть использовано для автоматического контроля работы автоматизированных листоштамповочных комплексов и линий оборудования с применением промышленных роботов и манипуляторов.
Известна система внешней информации робототехнического комплекса холодной листовой штамповки, содержаш,ая датчики положения деталей, каждый из которых посредством индивидуального усилителя электрически соединен с блоком логики, связанным с системой управления роботом 1.
Недостатки этой системы - низкая чув-, ствительность датчиков, небольшие - порядка нескольких миллиметров - их зоны обнаружения, что затрудняет контроль сдваивания тонких заготовок, особенно при коробленых листах, и вынуждает размещать сопла датчиков правильности укладки в штамп непосредственно в матрице штампа, что требует дополнительной его доработки - сверления отверстий для установки в них датчиков. При смене штампуемой детали аналогичная доработка повторяется. Засорение сопел датчиков маслом, стружкой и т.п. приводит к недостоверности контроля. Цель изобретения - повышение надежности работы системы внешней информации робототехнического комплекса холодной
5 листовой штамповки.
С этой целью система внешней информации робототехнического комплекса холодной листовой штамповки, содержашая датчики положения детали, каждый из которых посредством индивидуального усилителя электрически соединен с блоком логики, связанным с системой управления роботом, снабжена последовательно соединенными между собой параметрическим преобразователем переменного напряжения в постоянное, фильтром и компаратором, установленными между каждым датчиком положения детали и блоком логики, а также генератором импульсного тока и блоком автоматической регулировки усиления в виде последовательно соединенных запоминающе20го устройства, схемы сравнения и усилителя рассогласования. Усилитель снабжен регулятором усиления, вход запоминающего устройства связан с выходом фильтра, выход усилителя рассогласования - с входом
г.егулятора усиления усилителя, генератор импульсного тока - с параметрическими преобразователями, а датчики положения детали выполнены в виде фотоприемников и излучателей. Фотоприемники датчиков положения детали связаны посредством соответствующих им усилителей с входами параметрических преобразователей, а излучатели подключены .к генератору импульсного тока.
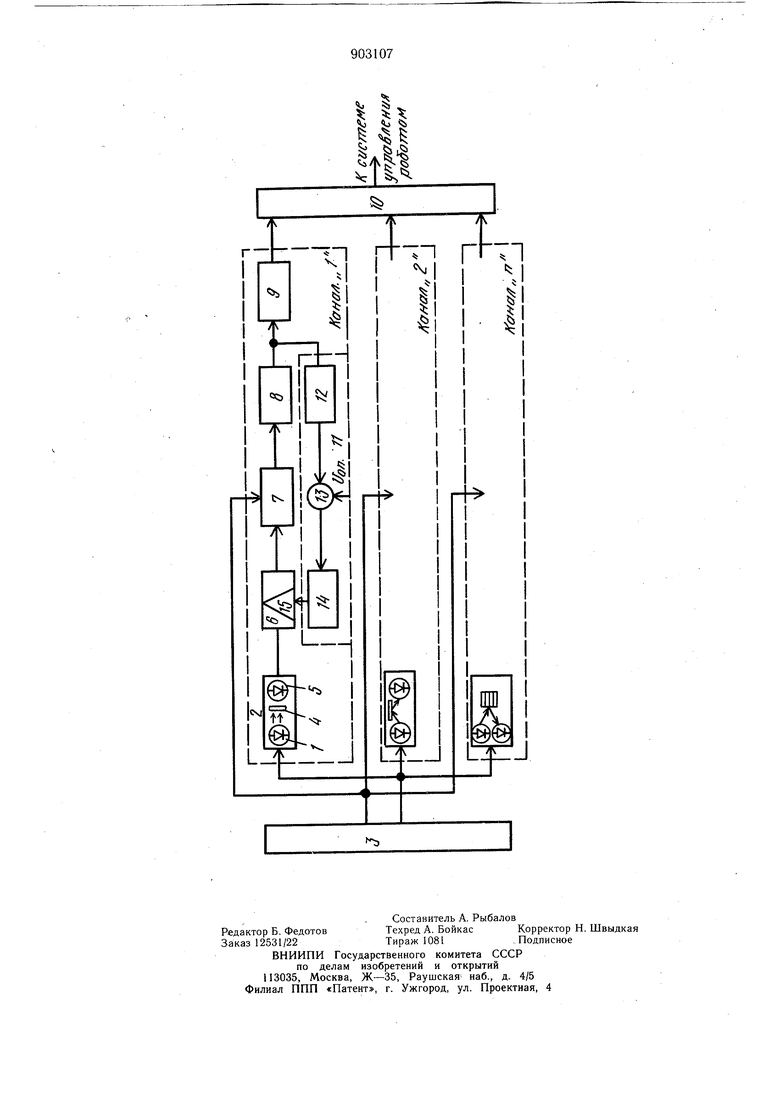
На чертеже изображена блок-схема системы внешней информации робототехнического комплекса холодной листовой штамповки.
Излучатели 1 датчиков 2 положения детали . подключены к генератору импульсного тока 3. В зависимости от назначения датчики могут работать по принципу прерывания светового потока деталью 4 или его отражения от детали или ее торца. Во всех случаях световой поток должен восприниматься фотоприемником 5.
На принципе прерывания светового потока деталью основано действие датчика положения детали в штампе. В этом случае излучатель 1 и приемник 5 разделены и выполнены в отдельных модулях, которые установлены над штампуемой деталью 4 по диагонали навстречу друг другу вне зоны работы пресса. Датчики предназначены дляфиксации светового потока деталью, если таковое происходит. В зависимости от конфигурации детали может быть установлено несколько таких пар.
На принципе отражения светового потока от детали основано действие датчиков выноса детали и облоя из зоны пресса. В этом случае, как и во всех остальных, излучатель t и приемник 5 выполнены в одном модуле. Оба датчика установлены в схвате робота и предназначены для фиксации отрал енного от детали или облоя светового потока.
На этом же принципе, но при отражении светового потока от торца детали основано действие датчиков уровня подаваемых деталей в загрузочном устройстве и сдваивания деталей в схвате робота. В этом случае датчик устанавливают в подающем устройстве и он фиксирует световой поток, отраженный от торца верхней детали, а установленный тут же датчик сдваивания фиксирует световой поток, отраженный от торца второй детали, если таковая оказывается в схвате робота.
Фотоприемники 5 всех датчиков 2 подключены каждый на вход своего усилителя 6.
Параметрический преобразователь 7 после усилителя б выполняет временную селек-. цию сигнала и преобразует переменное напряжение в постоянное. Его временные характеристики определяются синхросигналом с генератора импульсного тока 3.
Инерционный фильтр 8 выделяет среднее значение выходного сигнала преобразователя 7.
Компаратор 9 усиливает сигнал постоянного напряжения и преобразует его в дискретную форму.
Блок логики 10 обрабатывает дискретные сигналы и вырабатывает команду на останов комплекса в случае аварийной ситуации - нарушения положения детали на какой-либо позиции.
Блок 11 автоматической регулировки усиления оптимизирует соотношение уровйей срабатывания и сигнала.
Запоминающее устройство 12 сохраняет значение сигнала в течение той части цикла работы комплекса, когда на приемник соответствующего канала не падает световой поток.
Схема сравнения 13 сравнивает значение сигнала с заданным значением опорного напряжения.
Усилитель рассогласования 14 управляет усилителем б, регулируя регулятором 15 величину коэффициента усиления.
Система управления роботом управляет .т зиционировганием робота и останавливает его в случае аварийной ситуации - нарушения положения детали на любой позиции контроля.
Число каналов системы определяется числом позиций комплекса, на которых производится контроль.
Система внешней информации на примере одного канала работает следующим образом. Модулированное излучение излучателя Г, например светодиода, оптронного датчика 2, сформированное генератором импульсного тока 3, в зависимости от положения детали относительно датчика попадает или не попадает на приемник 5, например фотодиод. В фотоприемнике 5 модулированное излучение преобразуется в переменный электрический ток, который поступает на
0 вход усилителя б, в котором происходит усиление по высокой частоте. В системе применен апериодический усилитель, полоса пропускания которого согласована с частотой модуляции светового потока. Нижняя и верхняя частоты среза усилителя высокой частоты выбраны так, чтобы промышленные световые помехи и помехи электрического характера оказались за пределами полосы его пропускания.
В связи с тем, что излучатель работает
0 в импульсном режиме и, следовательно, световой поток его модулирован, появляется возможность произвести дополнительную селекцию по признакам, характерным для данного вида модуляции. Указанная селекция осуществляется параметрическим
преобразователем 7, на управляющий вход которого подается синхросигнал с генератора импульсного тока 3. В случае совпаде.ния временных характеристик рабочего
сигнала и синхросигнала, т.е. совпадения частоты, фазы и скважности, на выходе преобразователя образуется напряжение, среднее значение которого отличается от нуля и является полезным сигналом. В любом другом случае напряжение на выходе преобразователя будет существенно меньше. Оно может также отсутствовать или даже иметь другую полярность (при несовпадении фаз). Оно будет нулевым при переменном напряжении, частота которого равна частоте биении между сигналом и синхросигналом (при несовпадении частот). Инерционный фильтр 8 после преобразователя 7 подавляет переменное напряжение, выделяя только среднее значение на выходе преобразователя, осуществляя тем самым дополнительную селекцию сигнала в канале. В компараторе 9 сигнал усиливается и преЬбразуется в дискретную форму, после чего поступает в блок логики 10, где обрабатываются дискретные сигналь и вырабатывается команда для системы управления роботом на останов комплекса, если комбинация сигналов на входе блока соответствует аварийной ситуации, т.е. на какой-то позиции комплекса деталь заняла неправильное положение.
Одновременно сигнал с фильтра 8 попадает в блок 11 автоматической регулировки усиления - на вход аналогового запоминающего устройства 12, на выходе которого сохраняется значение сигнала в течение той части цикла работы комплекса, когда световой поток не попадает на фотоприемник данного канала. Затем сравнивающее устройство 13 сравнивает сигнал с заданным значением (с опорным напряжением). Полученный сигнал рассогласования попадает в усилитель рассогласования 14, выход которого управляется регулятором усиления 15, дополнительно введенным в усилитель 6. В блоке автоматической регулировки усиления оптимизируются соотношения уровня срабатывания и уровня сигнала. Блок автоматической регулировки усиления регулирует усиление таким образом, 41J превышение уровня сигнала над порогом срабатывания остается примерно постоянным. При этом уровень помех снижается настолько наскблько величина полезного сигнала превышала бы номинальное значение при отсутствии автоматической регулировки усиления. Линейность усиления
во всем динамическом диапазоне изменений входного сигнала предохраняет от перекрестных помех за счет модуляции сигнала мощной помехой в случае насыщения элементов.
. Использование описанного изобретения позволит повысить надежность работы системы внешней информации робототехнического комплекса холодной листовой штамповки.
Формула изобретения
Система внешней информации робототехнического комплекса холодной листовой штамповки, содержащая датчики положения детали, каждый из которых посредством индивидуального усилителя электрически соединен с блоком логики, связанным с системой управления роботом, отличающаяся тем, что, с целью повышения kaдeжнocти
0 работы, она снабжена последовательно соединенными между собой параметрическим преобразователем переменного напряжения в постоянное, фильтром и компаратором, установленными между каждым датчиком положения деталей и блоком логики, а также генератором импульсного тока и блоком автоматической регулировки усиления в виде последовательно соединенных запоминающего устройства, схемы сравнения и усилителя рассогласования, при этом усилитель снабжен регулятором усиления, вход запоминающего устройства связан с выходом фильтра, выход усилителя рассогласования - с входом регулятора усиления усилителя, генератор импульсного тока - с параметрическими преобразователями, а датчики
5 положения деталей выполнены в виде фотоприемников и излучателей, при этом фотоприемники датчиков положения деталей связаны посредством соответствующих им усилителей с входами параметрических преобразователей, а излучатели подключены к
генератору импульсного тока.
Источники информации, принятые во внимание при экспертизе 1. Пневмосистема преобразующего устройства модели УАМ-288. РТМ по применению струйных датчиков . внешней информации для комплексов пресс-робот, Воронеж ЭНИКМАШ, 1978, с. 30, 47, 55 (прототип).
