(54) СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕВДУ ОПТИЧЕСКИ ПРОЗРАЧНЬИИ ПОВЕРХНОСТЖШ И ЭЛЕКТРОННО. ОПТИЧЕСКОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) ДЛЯ РЕАЛИЗАЦИИ СПОСОБА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения расстояния до отражающей поверхности и устройство для его осуществления | 1985 |
|
SU1539527A1 |
| Устройство для измерения расстояний между отражающими поверхностями | 1984 |
|
SU1180697A1 |
| Способ измерения расстояния до отражающей поверхности | 1987 |
|
SU1516788A1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
| Устройство для измерения рабочего отрезка объективов | 1981 |
|
SU1004796A1 |
| Способ измерения положения объекта и устройство для его осуществления | 1988 |
|
SU1539525A1 |
| Фотоэлектрическое устройство для измерения угла наклона объекта | 1977 |
|
SU690289A1 |
| Способ измерения рабочего отрезка объективов и устройство для его осуществления | 1979 |
|
SU879357A1 |
| Фотоэлектрическое устройство контроля положения объекта | 1970 |
|
SU474674A1 |
| Способ измерения коэффициента передачи модуляции оптических систем | 1978 |
|
SU779837A1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения расстояния между оптически прозрачными поверхностями, например, толщины линзы, стенки стеклянной трубки, расстояния между линзами в объективе.
Наиболее близким техническим решением к изобретению является способ измерения расстояния между оптически прозрачными поверхностями при помощи оптических средств, заключающийся в том, что-перемещают изображение тест-объекта в направлении измеряемого расстояния и фиксируют момент фокусировки изображения тестобъекта на первой поверхности 1 3«
В данном способе формируют неподвижное изображение вспомогательного тест-объекта и фиксируют совмещение изображений тест-объекта и вспомогательного тест-объекта.
Известно электронно-оптическое устройство (вариант 1) для измерения расстояний между оптически прозрачными поверхностями, содержащее тестобъект в виде осветителя и диафрагмы, установленные последовательно по ходу светового потока, полупрозрачный элемент, сканирующий объектив с приводом, анализирующую диафрагму и фотоприемник, счётчик и соединенный
10 с ним блок индикации. Устройство также содержит вспомогательный источник света, дополнительньтй фотоприемник, растровый датчик перемещений, схему задержки и блок логики.
15
Известно электронно-оптическое устройство (вариант 2) для измерения расстояния между оптически прозрачными поверхностями, реализующее способ, содержащее тест-объект в ви20де осветителя и диафрагмы, установленные по ходу светового потока, полупрозрачный элемент, сканирующий объектив с приводом, анализирующую
диафрагму и фотоприемник, растровый датчик перемещений, соединенный с приводом, сЧетчик и блок индикации, подключенный к счетчику. Устройство также содержит вспомогательный источник света, дополнительный фотоприемник, схему задержки и блок логики.
Недостатком способа и устройства является малая точность измере ния, так как расстояния могут быть вычислены косвенным путем, при условии, когда одна из поверхностей имеет фиксированную кривизну.
Цель изобретения - повышение точ- ности измерения.
Указанная цель достигается тем, что фиксируют момент фокусировки изображения тест-объекта на второй поверхности и по временному инт рвалу между этими фокусировками судят об измеряемом расстоянии.
Кроме того, с целыо повышения точности при измерении толщины стенок цилиндрических изделий типа стеклянных трубок, совершающих колебательные движения, изображение тестобъекта строят одномерным в плоскости, перпендикулярной образующим изделия, с протяженностью, превышающей амплитуду колебаний изделия.
Указанная цель достигается тем, что устройство (вариант 1) снабжено блоком определения направления перемещения, входом, связанным с приводом объектива, соединенными последовательно блоком нахождения максимума, триггером, элементом И, генератором, выход которого соединен с входом элемента И, вход блока нахождения максимума пoдкJПOчeн к фотоприемнику, а выход элемента И соединен с входом счетчика, выход блока определения направления перемещения подключен к второму входу триггера.
Кроме того, с целью повышения точности измерения цилиндрических изделий диафрагмы выполнены щелевыми.
Указанная цель в устройстве {вариант 2) достигается тем, что устройство снабжено датчиком начала отсчета, соединенными последовательно блоком нахождения максимума, триггером и элементом И, вход блока нахождения максимума подключен к фотоприемнику, выход элемента И соединен с входом счетч1 а, вход датчика начала отсчета соединен с приводом, а выход - с вторым входом триггера, выход растрового датчика перемещений подключен к соответствующе- му входу элемента И.
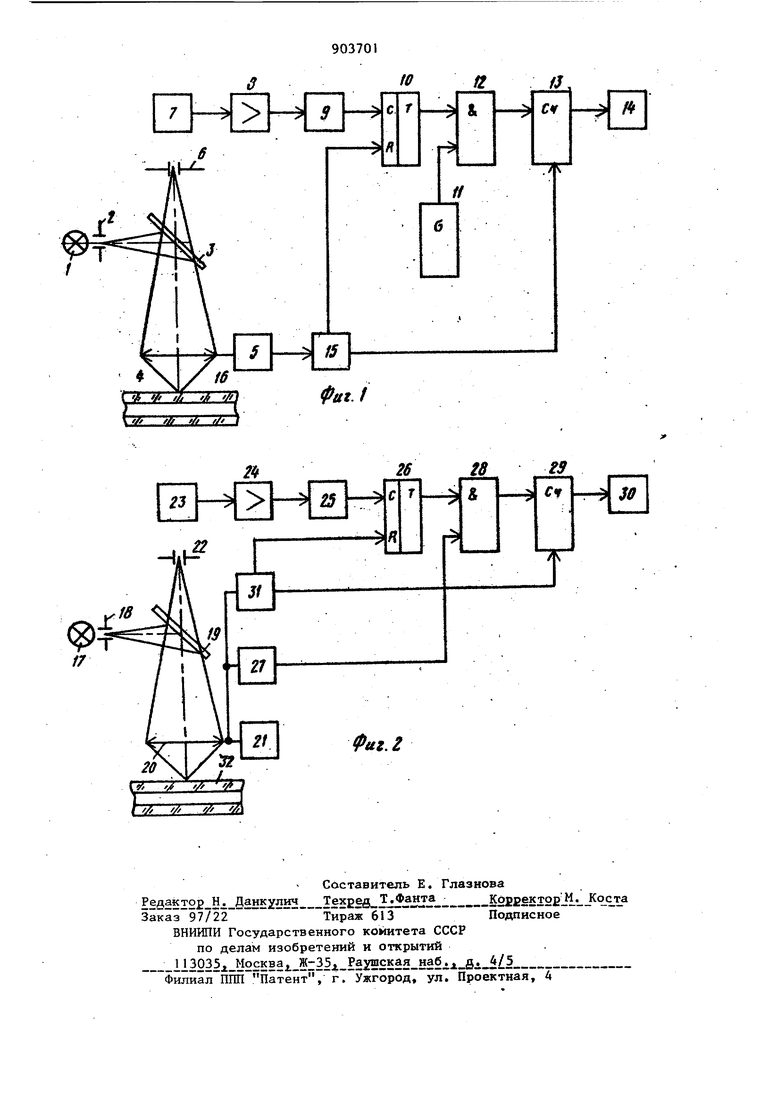
На фиг. 1 представлена функциональная схема устройства (вариант 1).
Устройство (вариант 1) содержи осветитель I, щелевую диафрагму 2, полупрозрачный элемент 3, сканирующий объектив 4, привод 5, анализирующую щелевую диафрагму 6, фотоприемник 7, усилитель 8, блок 9 нахождения максимума, триггер 10, генератор П, элемент 12 И, счетчик 13, блок 14 индикации, блок 15 определения направления перемещений, которым измеряется толщина стенки контролируемой стеклянной трубки 16.
Устройство (вариант 1) реализует способ измерения росстояния между оптически прозрачными поверхностями следующим образом.
Сканирующее изображешие щелевой диафрагмы 2 строится полупрозрачным элементом 3 и микрообъективом 4,
совершающим осциллирующие колебания с постоянной скоростью с помощью привода 5. При фокусировании изображения щелевой диафрагмы на одной из поверхностей контролируемой трубки , 16 отраженное изображение переносится oбъeкт шoм 4 в плоскость анализа,- где установлена анализирующая диафрагма 6. На выходе фотоприемника 7 формируется максимальный электрический сигнал, усиливаемый усилителем 8 и выделяемый блоком 9 нахождения максимума. Сигнал с выхода блока 9 переключает триггер 10 в состояние логическая 1. На выход элемента И 12 начинают проходить импульсы с генератора 11, которые перечитываются счетчиком 13.
При фокусировании изображения щелевой диафрагмы на вторую поверхность стеклянной трубки 16 на выходе блока 9 формируется второй импульс, перебрасывающий триггер 10 в состояние логический О, при котором на выход элемента И 12 импульсы не проходят.
в счетчике 13 фиксируется результат измерений, который индицируется блоком 14 индикации.
При изменении направления сканирования микрообъектива 4 блок 15
определения направления перемещения формирует сигнал, сбрасывающими триггер 10 в состояние логический О. При этом устройство подготовлено к очередному циклу измерений. Изменение положения контролируемой трубки 16 не создает дополнительной погреш ности измерений из-за построения пр тяженного изображения щелевой диафрагмой 2 и анализа анализирующей ди афрагмой 6. Реализация способа и устройства для его осуществления позволяет повысить точность измерений толщины стенок стеклянных трубок в процессе вытяжки, что позволяет в сочетании с системами регулирования обеспечит более высокое качество выпускаемой продукции. Устройство (вариант 1) работает следующим образом. Изображение щелевой диафрагмы 2, построенное с помощью полупрозрачного элемента 3 и сканирующего объе тива 4, отраженное от поверхности стеклянной трубки 16, анализируется анализирующей.диафрагмой 6. При перемещении сканирующего объ ектива 4, перемещаемого с постоянно скоростью приводом 5 в одно из край них положений, на выходе блока 15 определения направления перемещения формируется сигнал сброс, сбрасывающий триггер 10 и счетчик 13. В процессе сканирования, при фокусировании изображения щелевой диа рагмы 2 на первую поверхность стеклянной трубки 16, на выходе фотопри .емника 7 формируется максимальный электрический сигнал, усиливаемый усилителем 8. При этом блок 9 на:хождения максимума формирует первый импульсный сигнал, перебрасывающий триггер 10 в состояние логическая 1. На выход элемента 12 И начинают проходить импульсы с генератора 11, которые подсчитываются счетчиком 13 При фокусировании изображения щелевой диафрагмы 2 на вторую поверхность стеклянной трубки 16 на выходе блока 9 нахождения максимума формируется второй импульсный сиг-, нал, перебрасывающий триггер 10 в , состояние.логический О. Прохождени импульсов с генератора 11 на вход счетчика 23 прекращается, и в счетчике 13 фиксируется результат, пропорциональный толщине стенки стеклянной трубки 16, который индицируется блоком 14 индикации. Устройство может работать как в старт-стопном так и в непрерывном режиме. Колебания стеклянной трубки 16 в направлении, перпендикулярном направлению оптической оси сканирующего объектива 4, возможны в пределах изображения щелевой диафрагмы 2. На фиг. 2 представлена функцио- нальная схема устройства (вари ант 2). Устройство, (вариант 2) содержит осветитель 17, щелевую диафрагму 18, полупрозрачный элемент 19, сканирующий объектив 20, привод 21, анализирующую диафрагму 22, фотоприемник 23, усилитель 24, блок 25 нахождения максимума, триггер 26, растровый датчик 27 перемещений, элемент И 28, счетчик 29, блок 30 индикации, датчик 31 начала отсчета, которьм измеряется тол-цина стенки стеклянной трубки 32. Устройство (вариант 2)работает следующим образом. Изображение щелевой диафрагмы 18, построенное с помощью полупрозрачного элемента 19 и сканирующего объектива 20, отраженное от поверхности стеклянной трубки 32, анализируется анализирующей диафрагмой 22. При перемещении сканирующего объектива 20, перемещаемого приводом 21 в крайнее положение, на выходе датчика 31 начала отсчета формируется сигнал сброс, сбрасывающий триггер 26 и счетчик 29. В процессе сканирования при фокусировании изображения щелевой диафрагмы 18 на первую поверхность стеклянной трубки 32 на выходе фотоприемника 23 формируется максимальный электрический сигнал, усиливаемый усилителем 24. При этом блок 25 нахождения максимума формирует первый импульсный сигнал, перебрасывающий триггер 26 в состояние логичес кая Г . На выход элемента И 28 начинают проходить импульсы с растрового датчика 27 перемещений, которые подсчитываются счетчиком 29. При фокусировании изображения 1целевой диафрагмы 18 на вторую поверхность стеклянной трубки 32 на выходе блока 25 нахождения максимума формируется второй импульсный сигнал, перебрасывающий триггер 26 в состояние логический О. Прохождение импульсов с растрового датчика 27 перемещений на вход счетчика 29 прекращается, и в счетчике фиксируется результат, пропо циональный Толщине стенки стеклянной трубки 32, который индицируется блоком 30 индикации. Таким образом, в результате того, что в предлагаемом способе изображение диафрагмы строится протяженным, перпендикулярно образующим контролируемого объекта , а устройство снабже но блоками обработки информации, повышается точность измерения расстояния между оптически прозрачными поверхностями. Формула изобретения 1.Способ измерения расстояния между оптически прозрачными поверхностями при помощи оптических средст заключающийся в том, что перемещают изображение тест-объекта в направлении измеряемого расстояния и фиксируют момент фокусировки изображения тест-объекта на первой поверхности, отличающийся тем, что, с целью повышения точности измерения фиксируют момент фокусировки изображения тест-объекта на второй поверхности и по временному интервалу между этими фокусировками судят об измеряемом расстоянии. 2.Способ по п. f, отличающийся тем, что,с целью повышения точности при измерении толщины стенок цилиндрических издели типа стеклянных трубок, совершающих колебательные движения, изображение тест-объекта строят одномерным в плоскости, перпендшсулярной образующим изделия, с протяженностью, превьш1ающей амплитуду колебания изделия. 3. Электронно-оптическое устройство для измерения расстояний между оптически-прозрачными поверхностями содержащее тест-объект в виде осветителя и диафрагмы, установленные . последовательно по ходу светового потока, полупрозрачный элемент. сканирующий объектив с приводом, анализирующую диафрагму и фотоприемник, счетчик и соединенный с ним блок индикации, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерений, оно снабжено блоком определения направления перемещения, входом, связанным с приводсй объектива, соединенными последовательно блоком нахождения максимума, триггером, элементом И, генератором, выход которого соединен с вторым входом элемента И, вход блока нахождения максимума подключен к фотоприемнику, а выход элемента И соединен с входом счетчика, выход блока определения направления перемещения подключен к второму ВХОДУ триггера. 4.Устройство по п. 3, отличающееся тем, что, с целью повышения точности измерений цилиндрических изделий типа стеклянных трубок, совершающих колебательные движения, диафрагмы вьпюлнены щелевыми . 5.Электронно-оптическое устройство для измерения расстояния между оптически прозрачнь1ми поверхностями, содержащее тест-объект в виде осветителя и диафрагмы, установленные по ходу светового потока, полупрозрачный элемент, сканирующий объектив с приводом, анализируютрую диафрагму и фотоприемник, растровый датчик перемещений, соединенш.1й с приводом, счетчик и блок индикации, подключенный к счетчику, отличающееся тем, что, с целью повышения точности измерений, оно снабжено датчиком начала отсчета, соединенными последовательно блоком нахождения максимума, триггером и элементом И, вход блока нахождения максимума подключен к фотоприемнику, выход элемента И соединен с входом счетчика, вход датчика начала отсчета соединен с приводом, а выходс вторьм входом триггера, выход растрового датчика перемещений подключен к соответствующему входу элемента И. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3652164, кл. G 01 В 9/00, 1972 (прототип),
2tt
26
t8
t9
