1
Изобретение относится к электротехнике и может быть использовано для управления бесконтактными электродвигателями постоянного тока.
Известно, что для повышения энергетических показателей в бесконтактных электродвигателях постоянного тока необходимо добиваться максимального приближения формы фаз.ного тока к форме фазной индукции 1 .
Известно устройство для управления бесконтактным двигателем постоянного тока, содержащее коммутатор, к которому подключен двигатель, датчик тока в цепи питания коммутатора и блок релейного включения питания двигателя, к которому подсоединен датчик тока. Посредством релейной обратной связи по току поддерживается его среднее значение на заданном уровне в пределах угла коммутации, что приводит к прямоугольной форме фазного тока. При этом ток на частоте регулирования пульсирует между
заданным верхним и нижним значе,ниями 21 .
Однако этому устройству присущи значительные трудности, связанные с регулированием величины тока, так как при этом необходимо пропорционально изменять верхнее и нижнее значение тока, т.е. уровень включения и отключения реле. При этом релей ный метод регулирования с задан10ной амплитудой пульсаций тока при- водит к изменению частоты переключения реле в функции скорости вращения и нагрузки двигателя. Таким образом, при определенном сочетании
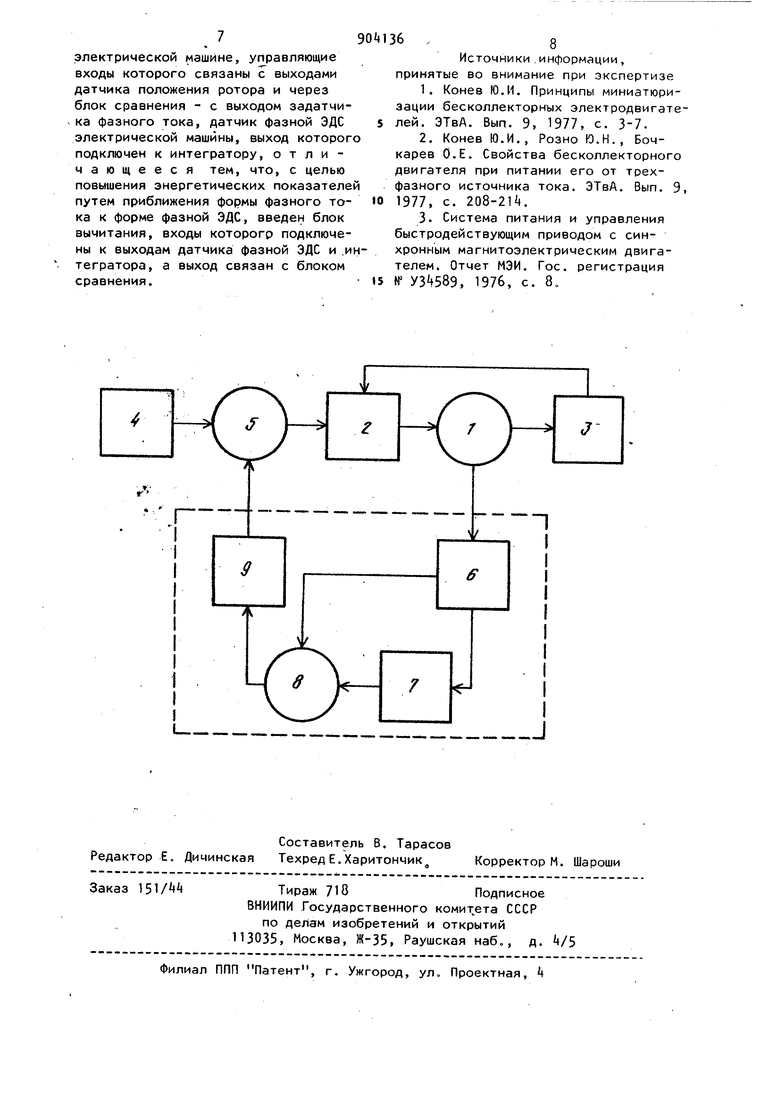
15 скорости вращения и нагрузки потребная частота переключения реле будет превышать частотные возможности элементов, осуществляющих переключение, что вызовет выход их из строя. Увеличивая амплитуду пульсаций- тока на . частоте регулирования, можно устранить это явление, однако такой путь приводит к дополнительным поте3904рям в электрической машине во всех режимах ее работы. Кроме того, форма фазного тока может быть только прямоугольной. Наиболее близким к предлагаемому является устройство для управления бескотактнь1М двигателем постоянного тока, выполненным на основе т-фазной электрической машины, содержащее коммутатор, подключенный к указанной электрической машине, управляющие входы которого связаны с выходами датчика положения ротора и через бло сравнения - с выходом задатчика фазного тока, датчик фазной ЭДС электрической машины, выход которого подключен к интегратору 3. Недостатками известного устройства являются низкие энергетические по казатели из-за несовпадения формы фазного тока и формы фазной индукции. Особенно это характерно для электрической машины с большой кратностью п ускового тока. Цель и.зобретения - повышение энер гетических показателей, преимущественно для электрической машины с большой кратностью пускового тока, путем максимального приближения формы фазного .тока в форме фазной ЭДС. Поставленная цель достигается тем что в устройство для управления бесконтактным электродвигателем постоян ного тока введен блок вычитания, вхо ды которого подключены к выходам дат чика фазной ЭДС и интегратора, а выход является выходом датчика фазного тока. На чертеже представлена Ьлок-схема предлагаемого.устройства. Устройство выполнено на базе т-фазной электрической машины 1 и содержит коммутатор 2, подключенный к электрической машине, управляющие входы которого подключены к датчику 3 положения ротора, а также к задатчику А фазного тока через блок 5 сравнения. Датчик 6 фазной ЭДС элект рической машины выходом подключен к интегратору 7 и к блоку 8 вычитания, к которой подключен выход интегратора 7- Выход блока 8 вычитания связан через усилитель 9 с блоком 5 сравнения, причем выходной сигнал усилителя 9 является сигналом обратной связи по току. Устройство работает следующим образом. Ток в фазах электрической машины из-за влияния противо-ЭДС вращения имеет пульсирующую форму рога тока. Это видно из выражения для тока при опущении нулевой индуктивности фазыUn - EmMsinoC R ср где и (оС) - ток Фазы в функции угла поворота ротора; Un - напряжение питания фазы; Ry((J) - максимальное значение противо-ЭДС вращения в функции угловой скорости; RO, - активное сопротивление Из выражения (1) видно, что .ток имеет наибольшее значение на краях угла коммутации и наименьшее в центре, что противоречит требованию наилучшего взаимодействия тока якоря с потоком индукторац так как момент, развиваемый машиной, определяется для элементарного тока как lj3(oC). B(cC)doC , (2) где MI - элементарный момент для проводника; К - коэффициент пропорциональности;г - радиус взаимодействия; В(оС) - индукция в зоне приводника в функции угла поворота ротора; Т - период коммутации. Следовательно,при углах поворота ротора, соответствующих наименьшему току фазы, индукция и противо-ЭДС наибольшие, а при углах, соответствующих наибольшему току фазы, - наименьшие. Это приводит к снижению результирующего момента при заданном среднем токе. Учет индуктивности фазы приводит к изменению в соотношении между передним и задним броском тока на угле коммутации сдвигу фазы тока относительно фазы ЭДС, усугубляя невыгодные энергетические соотношения. Для устранения этих эффектов целесообразно приближение формы фазного тока к форме фазной ЭДС и совпадение фаз тока и ЭДС. Для этой цели в устройстве выделяется сигнал фазной ЭДС определяется среднее значение этого сигнала и из него вычитается мгновенное значение, т.е. формируется сигнал коррекции фазного тока электрической машины для произвольной скорости вращения. После со ответствующего усиления сигнал коррекции сравнивается (вычитание) с сигналом задатчика среднего тока фа Зы, формируемым в соответствии с потребным моментом. Разница между сигналом задатчика тока и датчиком тока (сигналом коррекции) определяет выходную форму фазного тока. Из структурной схемы для установившейся скорости следует Uij-q( I E sinoCdoC- E sinoC)K - E...S n оС i R где и и сигнал, поступающий с датчика тока; коэффициент усиления усили теля 10; коэффициент усиления коммутатора ; мгновенное значение тока в фазе; период интегрирования, соответствующий углу коммута ции oCie (для однополупериод ного фазного коммутатора (tf 120°). Если произвести указанные действия (интегрирование, раскрытие скобок) и привести выражение к нормиро ванному виду (по отношению к напряжению источника питания U), то получимK3-qB KC -C 5ln«C(qKr1) Г, С) где К, коэффициент запо нения импульса, соответствующий среднему напряже нию, подаваемому на фазу двигател С - коэффициент инте грирования, зави сящий от схемы коммутатора и угл коммутации (для однополупериодного фазного коммутатора В 0,827 120); У |1 i относительное зна -1г 1; чение мгновенного тока в фазе (по отношению к току короткого замыкания) ; - относительное значение максимальной противо-ЭДС вращения. Если подобрать коэффициенты усиления К и q такими, что qK 1, то получим выражение, аналогичное для коллекторного двигателя Кз - В,С Г ; (5) где соответствует среднему значению ЭДС вращения, т.е. скорости двигателя. Пульсации тока на частоте вращения, как и в коллекторной машине будут отсутствовать,а КПД будет определяться выражением jC n,i Ч При q ц 1 можно получить форму фазного тока, приближающуюся к синусоидальной, т.е. еще более повысить энергетические показатели. Однако при этом в определенных условиях будет сказываться влияние индуктивности фазной обмотки (и цепи в целом) на сдвиг фазы тока от ЭДС вращения, тем больше, чем больше отношение Г Тдё , - период широтно-импульсной модуляции; Cj электромагнитная постоянная времени коммутируемой цепи. Использование предлагаемого устройства для управления бесконтактным электродвигателем постоянного тока, особенно с электрической машиной с большой кратностью пускового тока, обеспечивает повышение КПД и момента. Это приводит при реализации к повь1шению удельных энергетических показателей системы в целом. Особенно это важно при реализации интегральногибридных бесконтактных электродвигателей постоянного тока, у которых устройство управления и электрическая машина конструктивно могут быть объединены. Формула изобретения Устройство для управления бесконтактным двигателем постоянного тока, выполненным на основе т-фазной электрической.машины, содержащее коммутатор, подключенный к указанной
лектрической машине, управляющие входы которого связаны с выходами датчика положения ротора и через блок сравнения - с выходом задатмика фазного тока, датчик фазной ЭДС электрической машины, выход которого подключен к интегратору, отличающееся тем, что, с целью повышения энергетических показателей путем приближения формы фазного тока к форме фазной ЭДС, введен блок вычитания, входы которогр подключены к выходам датчика фазной ЭДС и .интегратора, а выход связан с блоком сравнения.
Источники.информации, принятые во внимание при экспертизе
1.Конев Ю,И, Принципы миниатюризации бесколлекторкых электродвигателей. ЭТвА. Вып. 9, 1977, с. 3-7.
2.Конев Ю.И., Розно Ю.Н., Бочкарев О.Е. Свойства бесколлекторного двигателя при питании его от трехфазного источника тока. ЭТвА. Вып. 9,
1977, с. 208-214.
3.Система питания и управления быстродействующим приводом с синхронным магнитоэлектрическим двигателем. Отчет МЭИ. Гос. регистрация
№ , 1976, с. 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый вентильный электродвигатель | 1988 |
|
SU1693706A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Вентильный двигатель | 1983 |
|
SU1130970A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2365025C1 |
| Бесконтактный асинхронизированный вентильный электродвигатель | 1987 |
|
SU1561163A1 |
