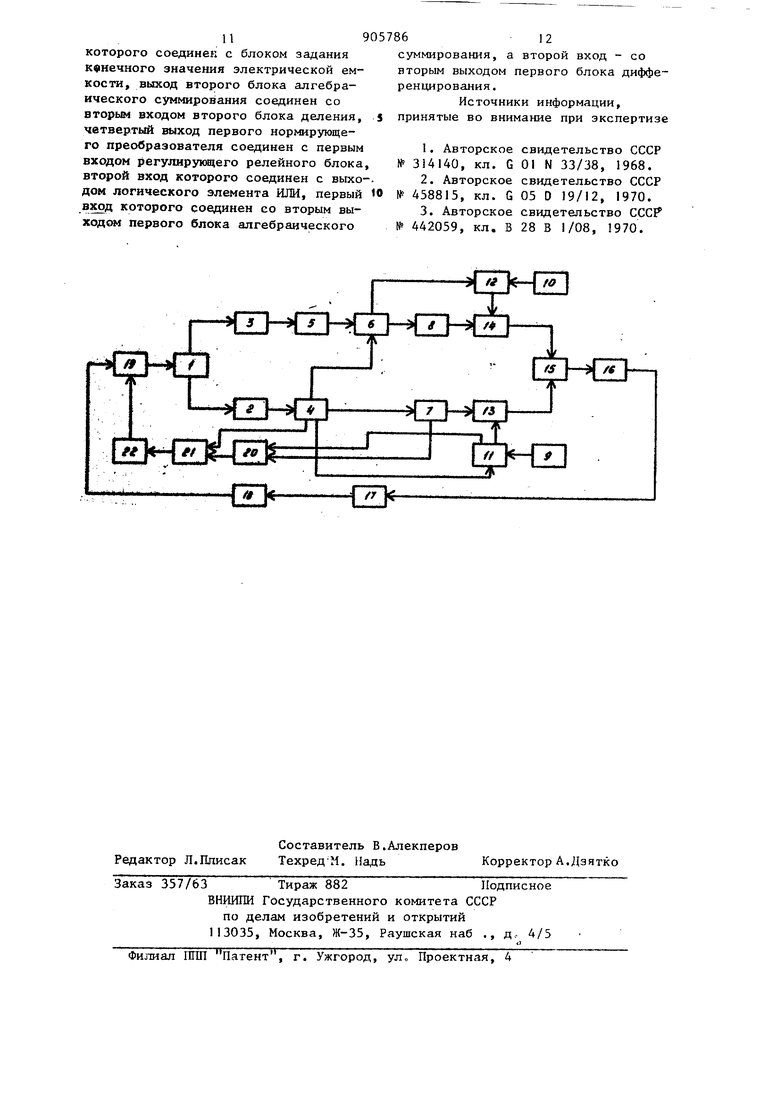
блок, подключенный к блоку управления с исполнительным механизмом включения - выключения вибрации, второй нормиругадий преобразователь, второй блок дифференцирования, подключенный к первому входу второго блока деления, выход которого соединен со вторым входом элемента сравнения 3J. В этом устройстве о параметре структурообразования, как гидратационное схватывание, судят по количеству вьщелившегося тепла - температуре, смеси, которая полностью не отражает физико-химические процессы схватывания. Кроме того, поддержание постоянным отношения скорости схватывания к скорости вспучивания, используемое в известном способе, не обеспечивает синхронизма в одновременном задержании процессов газовыделения и сз1ватывания. Поэтому .данный способ не может обеспечить тр буемое качество готовой продукции. Цель изобретения - повышение качества продукции. Цель достигается тем, что соглас но способу управления процессом стру турообразования при виброударном формовании ячеистобетонных смесей, включающем определение скорости схва тывания, скорости-.изменения высоты подъема смеси, управление режимом ыиброударных воздействий и определение моментов включения и отключени вибратора, дополнительно измеряют на чальный уровень смеси, задают конечное значение высоты вспучивания смеси и конечное значение сигнала, характеризуняцего окончание процесса схватывания, определяют разность меж ду заданным и текущим значениями высоты вспучивания, на основе которо вычисляют время окончания процесса вспучивдния при данной скорости изме нения высоты подъема смеси, определя ют разность между заданным и текущим значениями сигналов, характеризующих процесс схватывания, на основе которых вычисляют время окончания процес са схватывания при данной скорости схватывания, причем управление режимом виброударных воздействий осуществляют по сигналу сравнения вычисленных времен окончания процессов вспучивания и схватывания, а момен1 90 4 включения вибратора определяют после заливки смеси в форму по начальному ypoBHii смеси и момент отключения вибратора - по достижении смеси заданной конечной высоты вспучивания или по установлению значения скорости изменения высоты подъема смеси, равного нулю. Устройство для управления процессом структурообразования при виброударном формовании ячеистобетонных смесей, включающее датчик высоты подъема смеси, который соединен с первым нормирующим преобразователем, первый выход которого подключен к первому блоку дифференцирования, первый выход блока дифференцирования соединен с первым входом первого блока деления, выход которого соединен с первым входом элемента сравнения, выход элемента сравнения через аналоговый регулирующий блок и блок управления подключен к исполнительному механизму изменения режима виброударных воздействий, регулирующий релейный блок, подключенный к блоку управления с исполнительным механизмом включения - выключения вибрации, второй нормирующий преобразователь, второй блок дифференцирования, подключенный к первому входу второго блока деления, выход которого соединен со вторым входом элементасравнения, снабжено емкостным датчиком и корректирующим блоком, блоками алгебраического суммирования, блоком задания конечной высота вспучивания смеси, блоком задания конечного значения электрической емкости и логическим элементом ИЛИ, причем второй выход первого нормирующего преобразователя соединен с первым входом первого блока алгебраического суммирования, второй вход которого соединен с блоком задания конечной высоты вспучивания смеси, первый выход - со вторым входом первого блока деления, емкостной датчик через второй нормирующий преобразователь соединен с первым входом корректирующего блока, второй вход которого соединен с третьим выходом первого нормирующего преобразователя, один выход корректирующего блока соединен со входом второго блока дифференцирования, а другой выход соединен с первым входом второго блока алгебраического суммирования, второй вход которого соединен с блоком задания конечного значения электрической ем кости, выход второго блока алгебраического суммирования соединен со вторым входом BTopornf блока деления, четвертый выход первого нормирующего преобразователя соединен с первым входом регулирующего релей ного блока, второй вход которого соединен с выходом логического злемента ИЛИ, первый, вход которого сое динен со вторым выходом первого блока алгебраического суммирования, а второй вход - со вторым выходом первого блока дифференцирования. На чертеже изображена блок-схема устройства для осуществления предлагаемого способа. Устройство для осуществления спо соба состоит из формы 1 с ячеистобетонной смесью, датчика 2 высоты вспучивания смеси, емкостного датчика 3, нормирунядих преобразователей А и 5, корректирующего блока 6, блоков 7 и 8 дифференцирования, бло ка 9 задания конечного значения высоты вспучивания смеси, блока 10 задания конечного значения электрической емкости, блоков II и 12 алгебраического суммирования, блоков 13 и 14 деления, элемента 15 сравне ния, аналогового регулирующего блока 16, блока 17 управления, исполни тельного механизма 18, виброударной площадки 19, логического элемента 20 ШМ, регулирукйцего релейного бло ка 21, управляющего блока 22, , Устройство работает следуиядим об разом, В форму I с ячеистобетонной смесью устанавливают датчик 2 высоты вспучивания смеси и емкостной датчик 3, который контролирует процесс гидратационного схватывания, Сигналы с датчиков 2 и 3 поступают в нор мирующие преобразователи 4 и 5, где преобразуются в унифицированньй сиг нал постоянного тока 0-5 мА, Выход нормирующего преобразователя 5 соединен с блоком коррекции 6, на второй вход которого подают сигнал с выхода )1ормирующего преобразователя 4. В блоке 6 осуществляется корр ция сигнала емкостного датчика на процесс газообразования в смеси, ко торый также оказывает влияние на из менение величины электрической емКОСТИ, Скорректированный сигнал подается в блок 8. дифференцирования и блок 12 алгебраического суммирования, на второй вход которого поступает сигнал с блока 10 задания конечного значения электрической емкости Cj. Конечное значение (заданное) электрической емкости зависит от величины расчетной активности смеси. В блоке 12 вычисляется разность между заданным значением электрической емкости С j и истинным С в данный момент времени t; , т,е. ход блока 12 алгебраического суммирования соединен со входом блока 14 деления, на второй вход которого поступает, сигнал с блока 8 дифферен- цирования, где определяется скорость процесса схватывания в данный момент времени t., В блоке 14 выполняется операция деления сигнала блока 12 алгебраического суммирования на сигнал блока 8, пропорциональный скорости схватывания смеси. На выходе блока 14 деления сигнал, пропорциональный времени окончания процесса схватывания tig, при данной скорости схватывания. Выход нормирукяцего преобразователя 4 соединен также со входом блока 7 дифференцирования и входом блока 11 алгебраического суммирования, второй вход которого соединен с блоком 9 задания конечной высоты вспучивания h. Заданное значение высоты вспучивания h j устанавливается в зависимости от требуемой по технологии высоты формируемого массива, В блоке 11 вычисляется разность между заданной h и истинной h. в данный момент времени t высотой вспучивания ячеистобетонной смеси. Сигнал с блока 11 алгебраического суммирования, пропорциональный разности сигналов hj-hj, поступает в блок 13 деления. На второй вход блока 13 подается сигнал, пропорциональный скорости вспучивания смеси, с выхода блока 7 дифференцирования. В блоке 13 выполняется операция деления сигнала блока 11 алгебраического суммирования на сигнал блока 7 дифференцирования. На выходе блока 13 сигнал, пропорциональный времени окончания процесса вспучивания , при данной скорости вспучивания. В элементе 15 сравниваются сигналы блоков 13 и 14, Разностный унифицированный сигнал с элемента 15 сравнения поступа- ет на вход аналогового регулирующего блока 16, который посредством бл ка 17 управления и исполнительного механизма 18 изменения режима вибро ударных воздействий производит регулирование режима работы виброударно площадки I9. Включение виброударной площадки 19 осуществляется по сигналу о начальном уровне смеси в форме 1 посл заливки, поступающему с выхода нормирукщего преобразователя 4, в регу лирукядий релейный блок 21 и далее в управляйядий блок 22 с механизмом включения и выключения виброударных воздействий. Отключение виброудйрной площадки 19 осуществляется по сигналу, посту пающему в регулирующий релейный бло 21 через логический элемент 20 ИЛИ либо из блока 11 алгебраического су мирования о достижении высоты вспучивания заданного значения, либо из блока 7 дифференцирования об установившейся скорости вспучивания сме си, равной нулю. Способ заключается в следующем. Перед началом формования изделий в блоке 10 устанавливают заданн значение сигнала, соответствующее окончанию процесса схватывания С, а в блоке 9 устанавливают заданную высоту вспучивания ячеистобетонной смеси hg. После выгрузки.в форму ячеистобетонной смеси в нее помещают дат- . чик для контроля за процессом газовыделения - уровнемер 2 и датчик дл контроля процесса схватывания - емкостной датчик 3. В нррмируют их преобразователях 4 и 5 сигналы преобразуют р унифицированные 0-5 мА. В блоке 8 дифференцирования определяют скорость процесса схватывания, а в блоке 12 алгебраического суммирования определяют разность между заданным значением сигнала, характеризунндим процесс схватывания и истинным в данный момент времени. В блоке 14 путем деления выходного сигнала блока 11, пропорциональ ного разности Ca-C|s, на выходной сигнал блока В,пропорциональный скорости схватывания V, вычисляют время окончания процесса схватывания tSf, при данной скорости схватывания 4-- в блоке 7 дифференцирования определяют скорость вспучивания смеси 6 V а в блоке 11 алгебраического суммирования вычисляют разность между заданной высотой вспучивания h и истинной h в данный момент времени. В блоке 13 путем деления выходного сигнала блока 11, пропорционального разности h-xh, на выходной сигнал блока 7, пропорциональный скорости вспучиваггая смеси Vy , вычисляют время окончания процесса вспучивания t;/,. при данной скорости ..тпЬ- 4i вспучивания V, т,е, Известно, что для получения готовой продукции высокого качества необходимо, чтобы процессь газовыделения (вспучивания) и схватывания заканчивались одновременно. Поэтому на выходе элемента 15, где сравнивают время окончания процесса схватывания tigП1 и данной скорости схватывания VpH и время окончания процесса вспучивания при данной скорости вспучивания Vyi; , будет сигнал, пропорциональный времени рас согласования процессов газовыделения (вспучивания) и схватывания. Сигнал рассогласования с элемента 15 поступает на вход регулирукнцего блока 16, на выходе которого формируется сигнал, управляющий режимом виброударных воздействий, направляя процесс труктурообразования в желаемом направлении. Виброударная установка включается после заливки формы смесью по достижении начального уровня, а выключается при достижении уровня смеси заданного значения либо по установившемуся значению скорости изменения высоты вспучивания, равному нулю. Та1сим образом, определяя в каждый момент времени время окончания процессов газовыделения (вспучивайия) и схватывания при данных условиях протекания процесса структуроo6pa3OBajnw, можно нутам изменения интенсивности виброударных воздействий направить процесс структурообразования так, чтобы газовьщелеие (вспучивание) и схватывание меси заканчивались одновременно. сли же из-за качества сырьевых, маериалов невозможно обеспечить одноременность окончания процессов газоыделения (вспучийания) и схватывания, о система стремится минимизировать ошибку в рассогласовании этих процес сов. Внедрение предлагаемого способа управления процессом структурообразования при виброударном формовании ячеистобетонных смесей и устройства для его осуществления на предприяти промышленности строительных материалов, изготавливающих изделия из ячеистого бетона по виброударной те нологии,позволяет усовершенствовать процесс формования, вести его в оптимальном режиме и получать готовую продукцию более высокого качества. Годовой экономический эффект от внедрения способа управления процес сом структурообразования при виброударном формовании ячеистобетонных смесей и устройства для его осуществления около 25 тыс. руб. по заво 120 тыс. м ду с производительностью ячеистого бетона в год. Формула изобретения 1. Способ управления процессом структурообразования при виброударном формовании ячеистобетонных смесей, включанлций определение скорости схватывания, скорости изменения высоты подъема смеси, управление режимом виброударных воздействий и определение моментов включения и от ключения вибратора, отличающийся тем, что, с целью повы шения качества продукции, дополнительно измеряют начальный уровень смеси, задают конечное значение высоты вспучивания смеси и конечное значение сигнала, характеризующего окончание процесса схватывания определяют разность между заданным и текущим значениями высоты вспучивания, на основе которой°вычисляют время окончания процесса вспучивания при данной скорости изменения высоты подъема смеси, определяют разность мезццу заданным и текущим значениями сигналов, характеризующих процесс схватывания, на основе которых вычисляют время окончания процесса схватывания при данной ско рости схватывания, причем управлени режимом виброударных воздействий ос ществляют по сигналу сравнения вычисленных времен окончания процессо вспучивания и схватывания, а момент включения вибратора определяет после заливки смеси в форму по начальному уровню смеси и момент отключения вибратора - по достижении смеси заданной конечной высоты вспучивания или по установлению значения скорости изменения высоты подъема смеси,равного нулю. - 2. Устройство для управления про- цессом структурообразования при виброударном формовании ячеистобетонных смесей, включаю1чее датчик высоты подъем смеси, который соединен с первым нормирующим преобразователем, первый выход которого подключен к первому блоку дифференцирования, первый выход блока .дифференцирования coe- динен с первым входом первого блока деления, выход которого соединен с первым входом элемента сравнения, выход элемента сравнения через аналоговый регулиругаций блок и блок управления подключен к исполнительному механизму изменения режима виброударных воздействий, регулирующий релейный блок, подключенньой к блоку управления с исполнительным механизмом включения - выключения вибрации, второй нормирующий преобразователь, второй блок дифференцирования, подключенный к первому входу второго блока деления, выход которого соединен со вторым входом элемента сравнения , отличающ,ееся тем, что оно снабжено емкостным датчиком и корректирующим блоком, блоками алгебраического суммирования, блоком задания конечной высоты вспучивания смеси, блоком задания конечного значения электрической емкости и логическим элементом ИЛИ, причем второй выход первого нормирующего преобразователя соединен с первым входом первого блока алгебраического суммирования, второй вход которого соединен с блоком задания конечной высоты вспучивания смеси, первый выход - со вторым входом первого деления, емкостной датчик через второй нормирующий преобразователь соединен с первым входом корректирующего блока, второй вход которого соединен с третьим выходом первого нормирующего преобразователя, один выход корректирующего блока соединен со входом второго блока дифференцирования, а другой выход соединен с первым входом второго блока алгебраического суммирования, второй вход которого соединен с блоком задания конечного значения электрической емкости, выход второго блока алгебраического суммирования соединен со вторым входом второго блока деления, s четвертый выход первого нормирующего преобразователя соединен с первым входом регулирующего релейного блока, второй вход которого соединен с выхо-. дом логического элемента ИЛИ, первый Ю вход которого соединен со вторым выходом первого блока алгебраического 905 612 суммирования, а второй вход - со вторым выходом первого блока дифференцирования . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 314140, кл. G 01 N 33/38, 1968. 2.Авторское свидетельство СССР № 458815, кл. G 05 D 19/12, 1970. 3.Авторское свидетельство ССС № 442059, кл. В 28 В 1/08, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом структурообразования при виброударном формовании ячеистобетонной смеси и устройство для его осуществления | 1985 |
|
SU1294607A1 |
| Способ управления процессом структурообразования при виброударном формовании ячеистобетонной смеси и устройство для его осуществления | 1987 |
|
SU1575114A1 |
| Устройство для автоматическогоупРАВлЕНия пРОцЕССОМ ВибРОфОРМиРОВАНияиздЕлий из ячЕиСТОбЕТОННыХ СМЕСЕй | 1979 |
|
SU795945A1 |
| Устройство для автоматического управления процессом виброформовки ячеисто-бетонных смесей | 1973 |
|
SU442059A1 |
| Устройство для управления процессом виброформования ячеистобетонной смеси | 1979 |
|
SU772850A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВИБРОФОРМОВАНИЯ ЯЧЕИСТОБЕТОННОЙ СМЕСИ | 1992 |
|
RU2027589C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ВИБРОФОРМОВКИ ЯЧЕИСТОБЕТОННОЙ СМЕСИ | 1973 |
|
SU399371A1 |
| ДВУХВАЛЬНЫЙ ВИБРОВОЗБУДИТЕЛЬ С ИЗМЕНЯЕМОЙ АМПЛИТУДОЙ КОЛЕБАНИЙ | 2005 |
|
RU2284869C2 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| СПОСОБ ПРОИЗВОДСТВА ЯЧЕИСТОБЕТОННОЙ СМЕСИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447041C2 |
