1
Изобретение относится к весоизмерительной технике, в частности, к устройствам для весового непрерывного дозирования сыпучих материалов.
Известны устройства для непрерывного весового дозирования сыпучих материалов, содержащие питатель с приводом, датчики веса и скорости ленты конвейера, блок перемножения сигналов, задатчик, элемент сравнения и регулятор 1.
Эти устройства не обеспечивают требуемой точности, особенно при неравномерной подаче материала питателем.
Прототипом изобретения является весо- вой дозатор непрерывного действия, содержащий питатель с приводом, грузоприемный механизм с приводом, контргрузом, преобразователем силы и преобразователем скорости ленты, выход которого соединен с первым входом блока вьшисления производительности, подключенного к первому входу регулятора, второй вход которого соединен с задатчиком производительности, а выход связан с приводами грузоприемного механизма и питателя 2.
Недостатком известного дозатора является низкая точность дозирования, обусловленная в основном погрешностью взвешивания материала на грузоприемном механизме. В этом случае точность измерения
массового расхода в основном определяется абсолютной погрешностью преобразователя силы, которая зависит от его наибольшего предела измерения, а также от коле.баний температуры и влажности в технологических помешениях, достигаюш,их значительных перепадов.
Целью изобретения является повышение точности дозирования.
Указанная цель достигается тем, что в весовой дозатор непрерывного действия введены задатчик аналогового сигнала, блок алгебраического суммирования и блок деления, причем вход блока деления подключен к выходу преобразователя силы, а выход соединен с первым входом блока алгебраического суммирования, ко второму входу которого подсоединен выход задатчика аналогового сигнала; при этом выход
блока алгебраического суммирования соединен со вторым входом блока вычисления производительности.
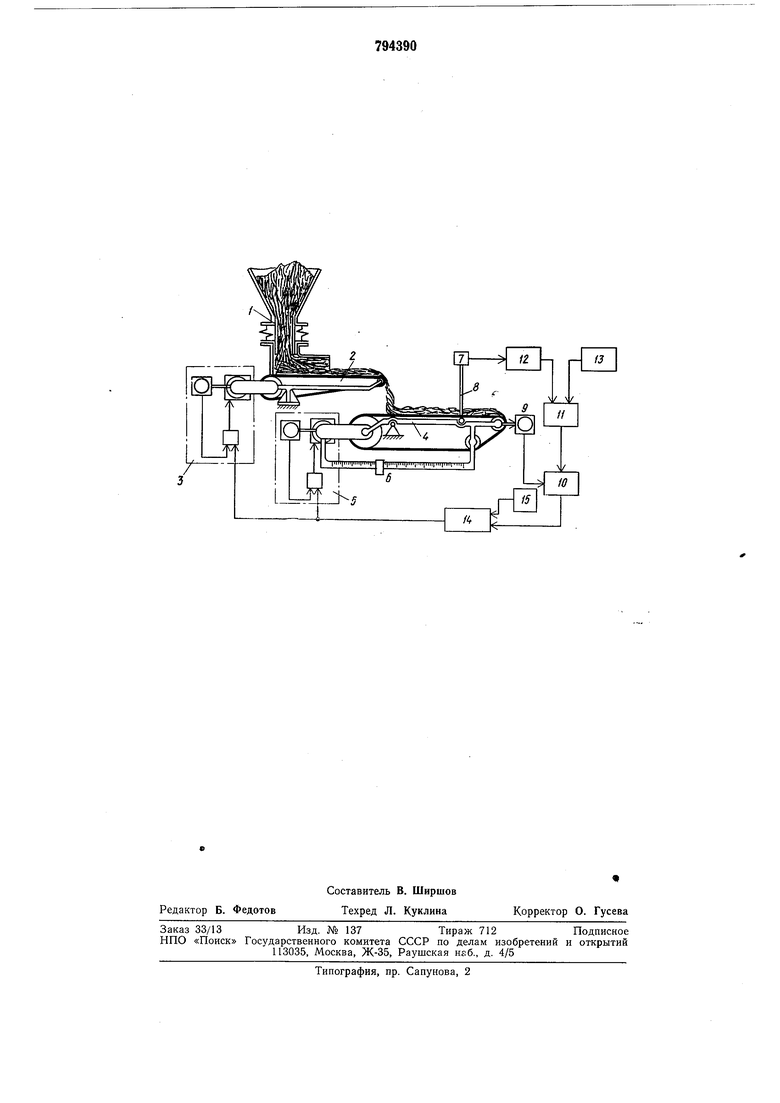
На чертеже представлена схема весового дозатора непрерывного действия.
Дозатор содержит загрузочную емкость 1, установленную над питателем 2 с приводом 3, грузоприемный механизм 4 с приводом 5 и контргрузом б, преобразователь 7 силы, связанный через тягу 8 с грузоприемным механизмом 4, преобразователь 9 скорости ленты, выход которого соединен с первым входом блока 10 вычисления производительности, на второй вход которого подключен выход блока 11 алгебраического суммирования. Первый вход блока 11 алгебраического суммирования соединен через блок 12 деления на постоянный коэффициент к выходу преобразователя 7 силы, второй вход блока 11 связан с задатчиком 13 аналогового сигнала. Выход блока 10 вычисления производительности соединен с первым входом регулятора 14, ко второму входу которого подключен задатчик 15 производительности. Выход регулятора 14 соединен с входами привода 5 грузоприемного устройства и привода 3 питателя.
Дозатор работает следующим образом. Сыпучий материал из загрузочной емкости 1 питателем 2 подается на грузоприемный механизм 4, контргрузом 6 которого уравновешивается как масса самого механизма, так и часть массы полезной нагрззки материала. Оставшаяся часть массы, являющаяся переменной и зависящая от флюктуации потока материала на грузоприемном механизме 4, измеряется преобразователем 7 силы.
Поскольку грузоприемный механизм 4 передает на преобразователь 7 меньшее усилие, это позволяет использовать преобразователи силы с меньшей величиной наибольшей предельной нагрузки, т. е. повысить разрешающую способность.
Сигнал с выхода преобразователя 7 силы поступает на блок 12, где он нормируется, а затем поступает на блок 11 алгебраического суммирования, где происходит его суммирование с аналоговым постоянным сигналом, поступающим с выхода задатчика 13 аналогового сигнала. Сформированный в блоке И сигнал, представляющий собой сумму переменной и постоянной составляющих и характеризующий массу материала на ленте грузоприемного устройства, поступает на один из входов блока 10 вычнсления производительности, на другой
вход которого подается сигнал от преобразователя 9 скорости ленты грузоприемного устройства. Сформированный в блоке 10 сигнал текущей производительности сравнивается в регуляторе 14 с сигналом задания, поступающим от задатчика 15. При наличии рассогласования сигналов регулятор 14 вырабатывает управляющее воздействие, которое, поступая одновременно на
привод 5 грузоприемного устройства и привод 3 питателя, устраняет отклонение производительности.
Формула изобретения
Весовой дозатор непрерывного действия, содержащий питатель с приводом, грузоприемный механизм с приводом, контргрузом, преобразователем силы и преобразователем скорости ленты, выход которого соединен с первым входом блока вычисления рроизводительности, подключенного к первому входу регулятора, второй вход которого соединен с задатчиком производительности, а выход связан с приводами грузоприемного механизма и питателя, о тличающийся тем, что с целью повышения точности дозирования, в него введены задатчик аналогового сигнала, блок алгебраического суммирования и блок деления, причем вход блока деления подключен к выходу преобразователя силы, а выход соеединен с первым входом блока алгебраического суммирования, ко второму входу
которого подсоединен выход задатчика аналогового сигнала, при этом выход блока алгебраического суммирования соединен со вторым входом блока вычисления производительности.
Источники информации,
принятые во внимание при экспертизе 1. Карлин Е. Б. Средства автоматизации для измерения и дозирования массы, М., Машиностроение, 1971, с. 172-185.
2. Патент Великобритании № 1093111, кл. G 1W, опубл. 1963 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор непрерывного действия | 1979 |
|
SU798739A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU746197A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Пневматический весовой дозатор непрерывного действия | 1979 |
|
SU792081A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Устройство для непрерывного весового дозирования сыпучих материалов | 1980 |
|
SU892225A1 |
| Устройство контроля тарировки дозаторов | 1976 |
|
SU651203A1 |
| Дозатор непрерывного действия | 1979 |
|
SU826292A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU932266A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |