Изобретение относится к средствам автоматизации производственного процесса виброформования крупноразмерных массивов, в частности к виброплощадкам с применением вибрационных воздействий при формовании ячеистобетонных изделий из газосиликатных смесей.
Известно устройство для автоматического управления процессом виброформования ячеистобетонной смеси, состоящее из блока определения скорости вспучивания, порогового устройства скорости вспучивания, блока управления, блока определения вязкости, второго блока управления, дополнительного порогового устройства, блока коррекции, виброплощадки [1].
Сигнал с блока определения скорости вспучивания, связанного с виброплощадкой, с установленной на ней формой со смесью поступает на пороговое устройство скорости вспучивания, которое срабатывает при заданной определенной установке скорости вспучивания. Управляющий сигнал с порогового устройства скорости вспучивания поступает на блок управления, вырабатывающий сигнал отклонения виброплощадки. С блока определения вязкости, связанного с виброплощадкой, сигнал поступает на пороговое устройство вязкости, срабатывающее при граничных значениях вязкости. Сигналы с пороговых устройств вязкости поступают на блок управления, который при величине больше верхней границы вязкости увеличивает интенсивность вибрации, а в начале процесса включает привод виброплощадки. При величине вязкости меньше ее границы блок управления уменьшает интенсивность вибрации. Дополнительное пороговое устройство, на вход которого поступает сигнал с блока определения скорости вспучивания, вырабатывает сигнал, управляющий блоком коррекции при заданных скоростях вспучивания, при которых необходимо изменение диапазона поддержания вязкости. Сигнал с порогового устройства вязкости поступает на блок управления, выходными сигналами которого регулируется режим виброплощадки.
Однако это устройство сложно по конструкции. В устройстве скорость вспучивания и вязкость связаны между собой. Кроме того, пороговое устройство скорости, блок управления скорости вспучивания и вязкости, дополнительное пороговое устройство, блок коррекции и другие элементы определяют интенсивность вибрации.
В устройстве отсутствует определение роста вспучивания ячеистого бетона и не регулируется смешивание, что резко снижает качество конечной продукции ячеистого бетона. Запрограммированная скорость вспучивания не может определить равномерность роста вспучивания. В данном изобретении отсутствуют условия структурообразования, так вязкость и скорость вспучивания не могут точно определить рост вспучивания и смешивания ячеисто-бетонной смеси.
Наиболее близким техническим решением к предлагаемому является устройство управления процессом структурообразования при виброударном формовании ячеисто-бетонной смеси, состоящее из датчика уровня и датчика схватывания смеси, размещенных в форме с ячеисто-бетонной смесью, исполнительного механизма, трех нормирующих преобразователей, блока задания конечного значения процесса схватывания, датчика температуры, задатчика температуры, двух электронных ключей, задатчика времени квантования, блока опроса датчиков схватывания и уровня смеси, задатчика предела минимального времени рассогласования окончания процессов схватывания и вспучивания смеси, цифроаналогового преобразователя, семи блоков алгебраического суммирования, счетчика времени, вычислительного блока, блока включения и выключения, двух блоков памяти, двух аналого-цифровых преобразователей, четырех блоков деления и логического элемента И [2].
Однако такое устройство для управления процессом структурообразования имеет ряд существенных недостатков. Устройство очень сложно по своей конструкции из-за наличия большого количества блоков контролируемых и программируемых, что приводит к большим ошибкам и не реальной оценки процесса. Запрограммированная температура, скорость вспучивания, процесс схватывания и вычисление реального процесса не может точно определить момент включения виброударной установки. В данном устройстве отсутствуют условия плавного включения и изменения амплитуды виброформования смеси, а также условия структурообразования. Так, температура, скорость вспучивания, процесс схватывания при сравнении с заданными значениями не могут точно определить рост вспучивания и смешивания ячеисто-бетонной смеси. Качество и конечный результат ячеистобетонной смеси по данной схеме точно не определяется из-за нереальных параметров, а также из-за отсутствия плавного автоматического процесса виброформования ячеисто-бетонной смеси.
Целью изобретения является упрощение конструкции и повышение надежности.
Поставленная цель достигается тем, что устройство управления процессом виброформования ячеистобетонной смеси, содержащее привод виброплощадки, датчики максимального и минимального уровней заполнения формы и схему управления приводом виброплощадки, снабжено первым, вторым и третьим датчиками промежуточного уровня заполнения формы, привод виброплощадки включает электродвигатель постоянного тока, якорь и независимая обмотка возбуждения которого соединены с реле максимального тока и выпрямительными мостами, схема управления приводом виброплощадки выполнена в виде вентиля, трех конденсаторов, восьми резисторов, двух тиристоров и последовательно соединенных диодов и стабилитронов, пяти по числу датчиков уровня потенциометров, трансформатора, переключателя и силового контактора с блоком включения, причем положительный вывод постоянного тока от выпрямительного моста в силовой цепи, выводы переменного тока которого через первый замыкающий контакт контактора соединены с источником питания, подключен к одной из обкладок первого конденсатора и анодам первого тиристора и первого диода, катод которого через второй диод подключен к первым выводам первого и второго резисторов, второй вывод первого резистора подключен к аноду второго тиристора, второй вывод второго резистора подключен к первому выводу третьего резистора, катоду второго стабилитрона и через четвертый резистор к первой базе транзистора, другой вывод третьего резистора подключен к первым выводам пяти потенциометров, другой вывод первого потенциометра подключен через замыкающий контакт датчика минимального уровня в форме к одному из выводов размыкающего контакта первого датчика промежуточного уровня, другой вывод второго потенциометра через замыкающий контакт первого датчика промежуточного уровня подключен к одному из выводов размыкающего контакта второго датчика промежуточного уровня, другой вывод третьего потенциометра через замыкающий контакт второго датчика уровня подключен к одному из выводов размыкающего контакта третьего датчика промежуточного уровня, другой вывод четвертого потенциометра через замыкающий контакт третьего датчика промежуточного уровня подключен к одному из выводов размыкающего контакта датчика максимального уровня, другой вывод пятого потенциометра через замыкающий контакт датчика максимального уровня, параллельно которому включен размыкающий контакт переключателя, и другие выводы размыкающих контактов датчиков уровня подключены к одной из обкладок второго конденсатора и эмиттеру транзистора, вторая база которого через пятый резистор подключена к одному из выводов первичной обмотки трансформатора, первый вывод вторичной обмотки которого подключен к управляющему электроду второго тиристора, катод которого соединен с другим выводом вторичной обмотки трансформатора и управляющим электродом первого тиристора, катод которого, другой вывод первичной обмотки трансформатора, анод второго стабилитрона и другая через седьмой резистор обкладка первого конденсатора подключены к катоду вентиля и положительной клемме якоря электродвигателя, отрицательный вывод выпрямительного моста в силовой цепи подключен к аноду вентиля и отрицательной клемме якоря электродвигателя, параллельно которому и вентилю включены последовательно соединенные третий конденсатор и восьмой резистор. Кроме того, устройство снабжено механизмом прижима бортов формы с конечным выключателем, блок включения выполнен в виде контактора, двух промежуточных реле, кнопок включения и отключения контактора и механизма прижима, причем одни из выводов конечного выключателя, кнопки отключения механизма прижима и размыкающего контакта токового реле в цепи якоря подключены к одному из выводов источника питания, другой вывод конечного выключателя подключен к первому выводу обмотки первого промежуточного реле, другой вывод кнопки отключения механизма прижима через размыкающий контакт датчика максимального уровня подключен к одним из выводов первого замыкающего контакта второго промежуточного реле, кнопки включения механизма прижима, второго замыкающего контакта датчика минимального уровня и через второй замыкающий контакт второго промежуточного реле к первому выводу электромагнита механизма прижима, другие выводы первого замыкающего контакта второго промежуточного реле, кнопки включения механизма прижима и второго замыкающего контакта датчика минимального уровня подключены к первому выводу обмотки второго промежуточного реле, другой вывод размыкающего контакта токового реле в цепи якоря подключен через замыкающий контакт первого промежуточного реле, размыкающий контакт токового реле в цепи обмотки возбуждения, кнопки отключения контактора и включения контактора, параллельно которому включен второй замыкающий контакт контактора, к одному выводу обмотки контактора, другой вывод которого и выводы обмоток электромагнита механизма прижима бортов и двух промежуточных реле подключены к другому выводу источника питания.
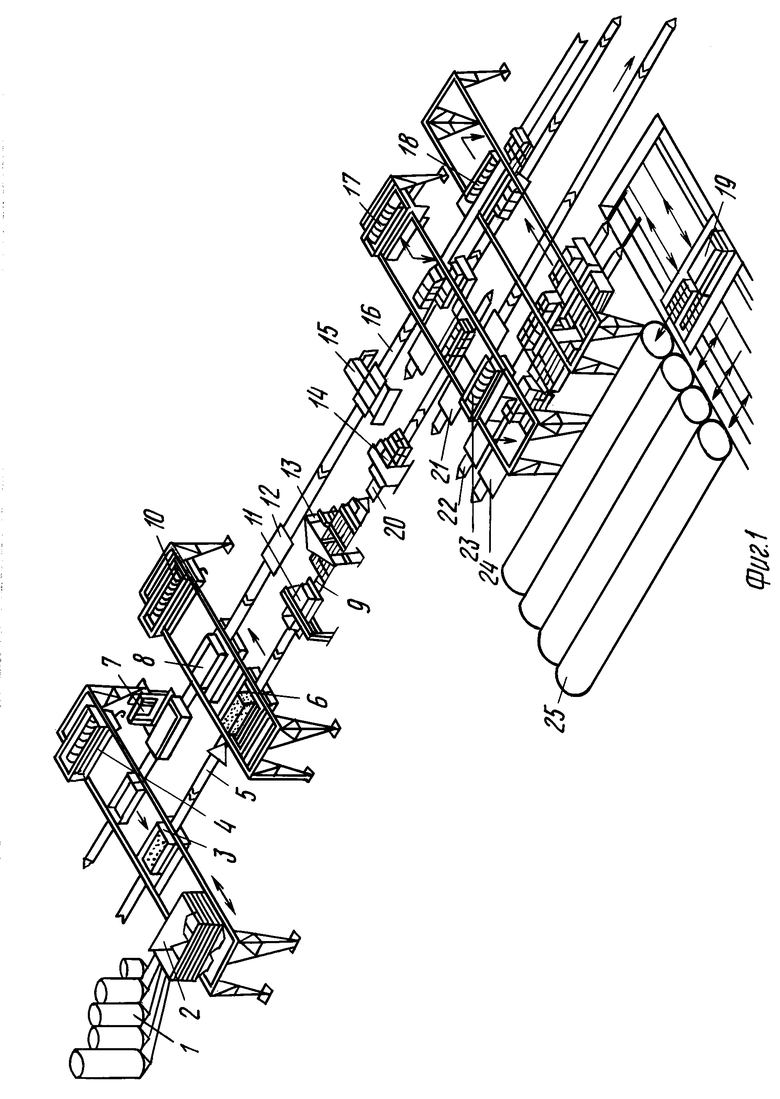
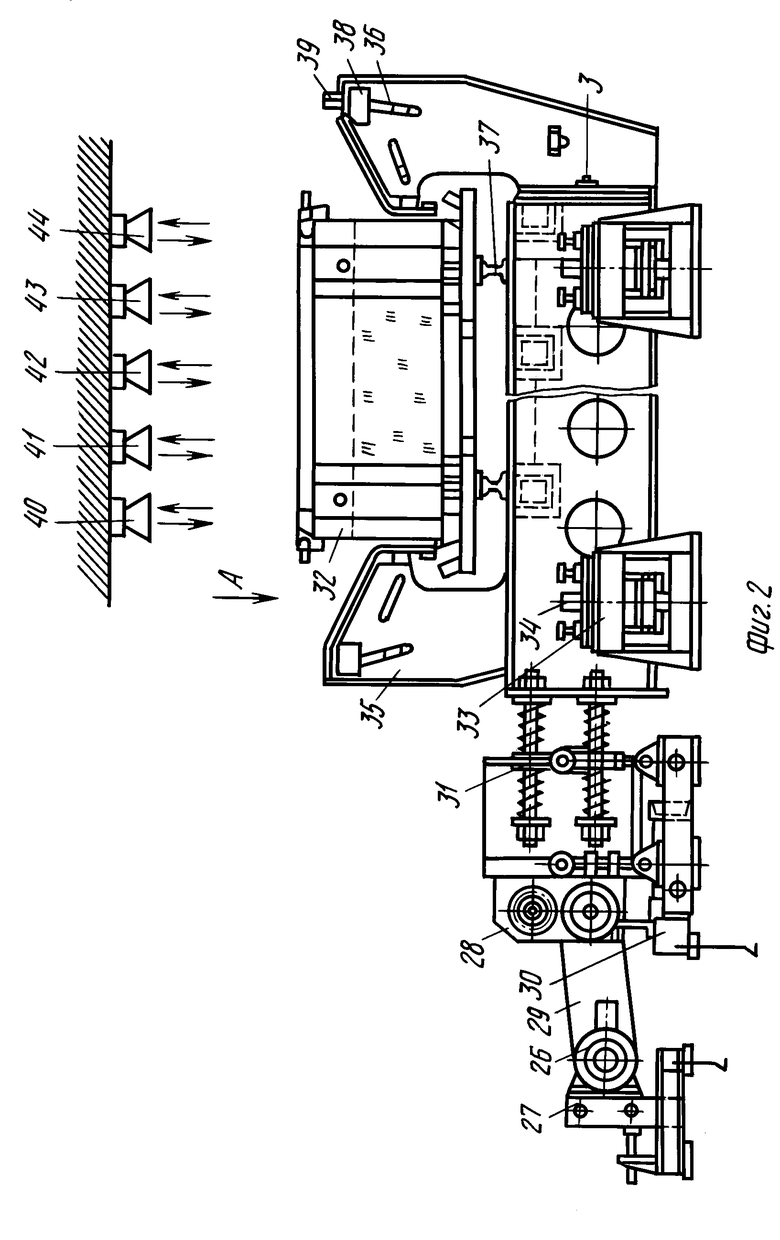
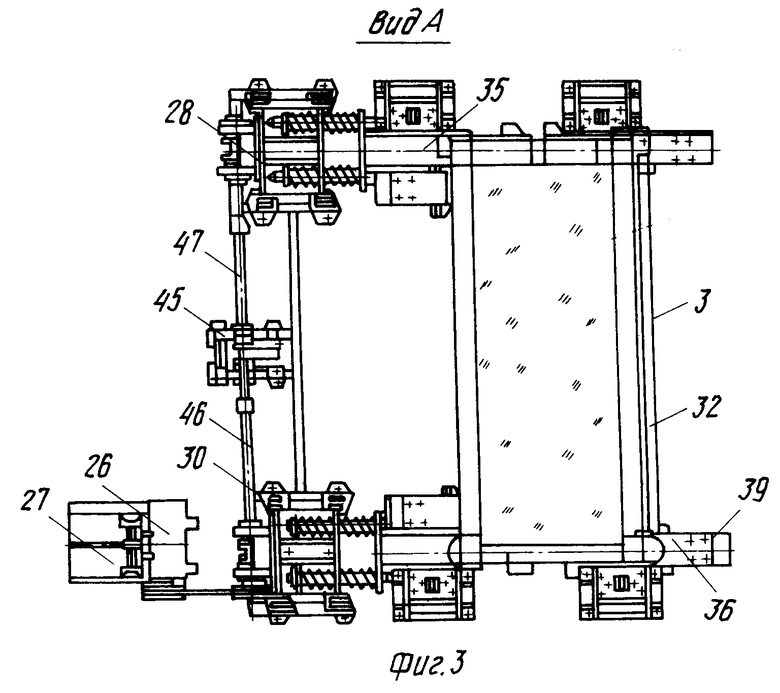
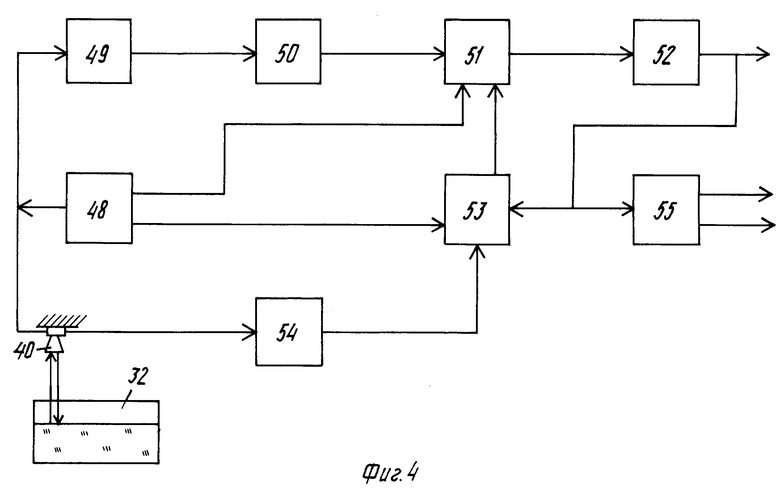
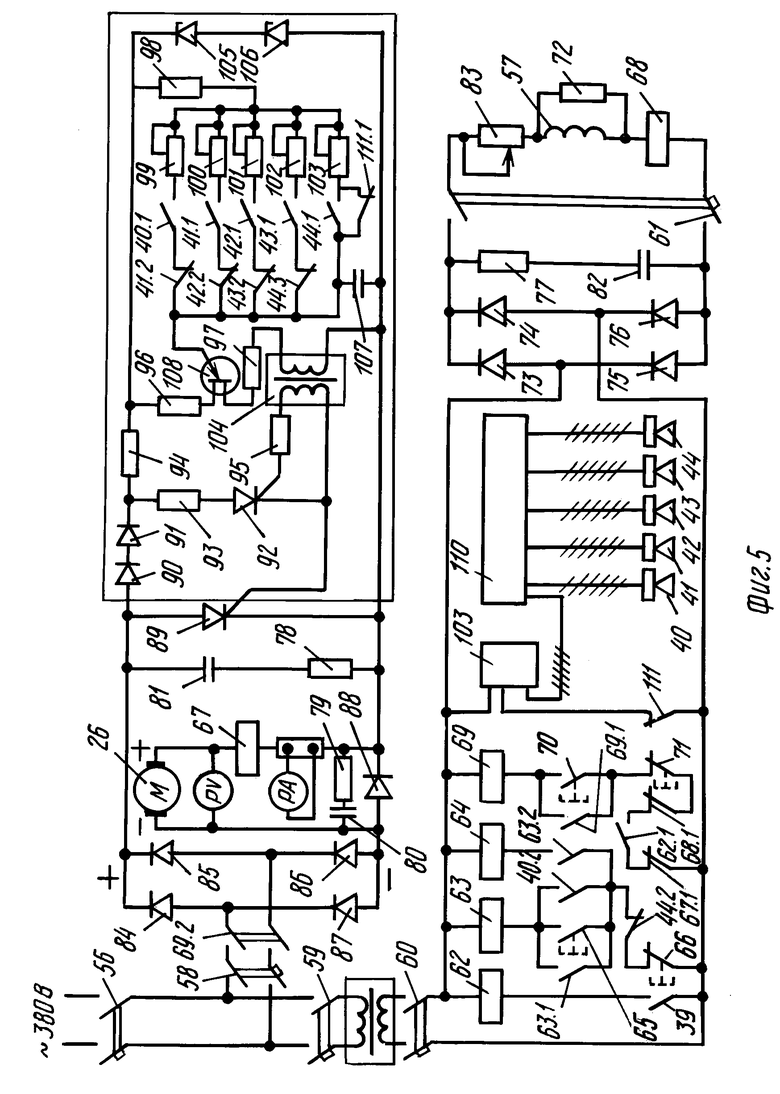
На фиг. 1 показана технологическая линия по производству блоков из ячеистого бетона; на фиг. 2 - виброплощадка, вид сбоку (одно из изделий рабочих органов линии); на фиг. 3 - вид А на фиг. 2; на фиг. 4 - структурная схема датчика уровня; на фиг. 5 - электрическая принципиальная схема устройства управления процессом виброформирования ячеисто-бетонной смеси.
Технологическая линия по производству блоков из ячеистого бетона включает смесеприготовительное отделение 1 (фиг. 1), газобетономешалку 2, виброплощадку 3, манипулятор 4, конвейер 5 выдержки, машину 6 для сборки и разборки форм (две штуки), установку 7 для смазки форм, форму 8 (установка для формирования), транспортирующее устройство 9, манипулятор 10, установку 11 для горизонтальной резки, поддон 12, машину 13 продольной и поперечной резки, установку 14 для снятия горбушки, установку 15 удаления подрезного слоя, конвейер 16 возврата форм, манипуляторы 17 и 18, передаточный мост 19, транспортирующее устройство 20, самоходную тележку 21 (две штуки), манипулятор 22, транспортирующее устройство 23, запарочную вагонетку 24 и автоклавы 25.
Одним из главных органов технологической линии по производству блоков из ячеистого бетона является виброплощадка 3, предназначенная для виброформирования крупноразмерных массивов.
Виброплощадка (фиг. 2) представляет собой машину с горизонтально направленными колебаниями, работающими в околорезонансном режиме. Резонансая частота может изменяться с помощью грузов, входящих в вибратор. Она предназначена для виброформирования крупноразмерных массивов. Частота колебаний регулируется изменением скорости вращения электродвигателя 26 привода. Виброплощадка 3 выполнена из отдельных узлов и секций, составляющих ее основу. Рама 27 представляет собой сварную конструкцию, предназначенную для установки и закрепления болтами электродвигателя 26 постоянного тока, который соединен с вибратором 28 при помощи клиноременной передачи 29. Вибратор 28 устанавливается на раме 30. Резонансная система 31 передает колебательные движения вибробалкам, на которых находятся формы 32 с массивом. Стойка 33 представляет собой сварную конструкцию и служит для установки подвески 34, которая предназначена для регулировки положения рамы в горизонтальной плоскости, а также для установки вибробалок 35 и 36 на четырех стойках 33. Сверху на вибробалки 35 и раму устанавливаются две направляющие 37, которые привариваются к раме. К стойкам 33 крепятся вибробалки 35 и 36, на которых закреплен механизм 38 прижима бортов. Контроль разжатия формы осуществляется при помощи конечного выключателя 39, устанавливаемого на механизме 38 прижима бортов правой вибробалки 36.
Контроль процесс роста массива ячеисто-бетонной смеси осуществляется в автоматическом режиме при помощи датчиков 40 - 44 уровня акустической системы.
Для передачи крутящего момента от вибратора 28 к синхронизатору 45 применяют два карданных вала 46 и 47 (фиг. 3).
В предлагаемом устройстве используют акустическую систему датчиков уровня, которая при помощи датчиков 40 - 44 управляет различным числом оборотов электродвигателя 26.
Принцип действия датчиков основан на локации уровня звуковыми импульсами, проходящими через газовую среду, и на явлении отражения этого импульса от границы раздела газ-контролируемая среда (массив ячеисто-бетонной смеси). Мерой уровня при этом является время распространения звуковых колебаний от источника излучения до контролируемой границы раздела сред и обратно до приемника.
Структурная схема датчиков приведена на фиг. 4.
Генератор 48 вырабатывает электрические импульсы с определенной частотой повторения, которые поступают в ультразвуковые акустические датчики 40. Импульсы после обратного преобразования усиливаются блоком 49. С выхода последнего импульсы подаются на вход накопительного устройства 50, служащего для выделения полезных сигналов на фоне импульсных помех. В накопительном устройстве 50 осуществляется запоминание и суммирование сигналов за шестнадцать периодов тактовой частоты. Формирование унифицированного выходного сигнала осуществляется при помощи компенсационного преобразователя, в состав которого входит схема 51 совпадения, усилительно-преобразующее устройство 52 и элемент 53 обратной связи, представляющий собой блок преобразования напряжения во временной интервал. Формирование выходного сигнала осуществляется путем автоматического слежения элементом 53 за положением отраженного сигнала. Отраженные сигналы с выхода блока 49 и прямоугольные импульсы с выхода элемента 53 подаются на схему 51 совпадения. Кроме того, схема содержит блок 54 температурной компенсации.
Сигнализатор 55 предназначен для сравнивания напряжения, пропорционального значению уровня контролируемой среды, с опорным напряжением, соответствующими верхнему и нижнему уровням сигнализации.
Основой датчиков 40 - 44 является пьезокерамический диск, работающий в режиме изгибных колебаний. Встроенные в эти датчики электронные узлы собраны на печатных платах и представляют собой тиристорный генератор зондирующих импульсов и предусилитель отраженных сигналов.
Схема устройства управления процессом виброформирования ячеисто-бетонной смеси показана на фиг. 5. Электродвигатель 26 постоянного тока обеспечивает включение плавной регулируемой вибрации на данной установке. Питание электропривода осуществляется напряжением 380 В, 50 Гц от двух фаз, защита от коротких замыканий и перегрузок всей системы электропривода осуществляется при помощи автоматического выключателя 56. Защита силовой части электропривода, цепей управления и обмотки возбуждения 57 электродвигателя 26 осуществляется автоматическими выключателями 58 - 61. Включение электропривода осуществляется двумя промежуточными электромагнитными реле 62 и 63.
Непосредственное управление включением разжатия форм 32 производится пневмоприводом при помощи электромагнита 64 в ручном и автоматическом режимах: в ручном режиме кнопками 65 и 66, а в автоматическом режиме акустической системой. Защита электродвигателя 26 от перегрузок осуществляется за счет контроля тока в самом электродвигателе 26 при помощи реле 67 максимального тока, последовательно включенного с питанием электродвигателя 26, а также контроля тока в обмотке возбуждения 57 электродвигателя 26, которая последовательно включена с реле 68 максимального тока.
Непосредственное дистанционное включение в работу системы вибрации производится при помощи контактора 69. Контактор 69 включается вручную кнопкой 70, а остановка кнопкой 71. Дистанционное включение разжатием формы 32 производится кнопкой 65, а остановка - кнопкой 66. При возникших бросках тока в обмотке возбуждения 57 электродвигателя 26 предусмотрено гашение бросков тока за счет параллельно установленного постоянного резистора 72, который сглаживает ток и защищает обмотку возбуждения 57. Питание последней осуществляется выпрямленным постоянным напряжением. Выпрямление напряжения производится при помощи вентилей 73 - 76, соединенных в однофазную мостовую выпрямительную схему. Сглаживание выпрямленного напряжения производится при помощи резисторов 77 и 72 на обмотке возбуждения 57, резистора 78 на силовой части питания, резистора 79 на вводной части питания электродвигателя 26.
Сглаживание также производится за счет конденсаторов 80 - 82, последовательно соединенных соответственно с резисторами 79, 78 и 77. Изменение скорости вращения электродвигателя 26 можно осуществлять непосредственно вручную при помощи панельного реостата 83. Питание электродвигателя 26 и цепи его управления осуществляется выпрямленным напряжением постоянного тока. Выпрямление производится при помощи вентилей 84 - 87, соединенных в однофазную мостовую выпрямительную схему. Вентиль 88 включен в схему постоянного тока на выходе однофазной мостовой схемы, разделяя полюсовку фаз. Управление величиной подачи напряжения на электродвигатель 26 осуществляется силовым тиристором 89. Изменение этой величины напряжения производится блоком управления, включающим диоды 90 и 91, кремниевой планарно-диффузионный тиристор 92, резисторы 93 - 98 и потенциометры 99 - 103, при помощи которых производится подача переменной величины напряжения в ручном и автоматическом режимах на трансформатор 104.
Для поддержания в блоке управления стабильного напряжения 20 В используют стабилитроны 105 и 106, соединенные последовательно. Переменная составляющая исходит от конденсатора 107 и управляет кремниевым планарным однопереходным транзистором 108, который с изменяющейся величиной напряжения запитывает первичную обмотку понижающего трансформатора 104 с ферритовым сердечником.
Кроме того, схема содержит преобразователь 109, предназначенный для преобразования времени запаздывания отраженного импульса относительно посланного зондирующего в выходной унифицированный сигнал постоянного тока, переключатель 110, предназначенный для подключения датчиков 40 - 44 уровня и переключатель 111.
Устройство работает следующим образом.
Питание всего устройства (электропривода) осуществляется напряжением переменного тока от двух фаз через автоматический выключатель 56, который необходимо включить, также включаются автоматические выключатели 59 и 60, обеспечивающие защиту цепи управления от коротких замыканий и перегрузок через понижающий трансформатор. Питание силовой части электропривода осуществляется через автоматический выключатель 58, который перед началом работы включается и обеспечивает защиту всей силовой части от коротких замыканий и перегрузок. На виброплощадке 3 (фиг. 2) устанавливается форма 32 с зашитым в нее ячеисто-бетонным массивом. Форма 32 на виброплощадке перед включением должна быть зажата четырьмя вибробалками 36 при помощи механизма 38 прижима бортов. Контроль зажатия формы производится при помощи конечного выключателя 39, который при зажатых балках срабатывает и замыкает свои нормально открытые контакты в цепи питания первого промежуточного реле 62. Реле 62 свои замыкающие контакты 62.1 замыкает и подготавливает цепь для работы контактора 69. При помощи кнопки 70 включается контактор 69, который своими контактами 69.1 блокирует контакты кнопки 70, а также одновременно замыкает свои силовые контакты 69.2 и запитывает силовую часть комплекса электропривода. Включенный автоматический выключатель 61 подает напряжение на однофазный мостовой выпрямительный блок, включающий четыре вентиля 73 - 76. Выпрямленное напряжение с минусовой фазой непосредственно поступает на клемму электродвигателя 26 постоянного тока, а также на схему управления. Выпрямленное напряжение с плюсовой фазы может поступить на клемму электродвигателя 26 только через управляемый тиристор 89. Открывание последнего производится только при помощи потенциометра 103 и схемы управления.
Схема управления работает следующим образом.
Питание схемы управления осуществляется через диоды 90 и 91, обеспечивающие защиту от нарушения полюсовки фаз, и резисторы 93 и 94, которые обеспечивают понижение напряжения. Стабильное поддержание напряжения в пределах 22 В осуществляется за счет последовательно соединенных стабилитронов 105 и 106. Скорость зарядки конденсатора 107 регулируется переменным потенциометром 103 до величины открывания транзистора 108, скорость открывания которого также зависит от напряжения на его базах и может изменяться за счет резисторов 96 и 97, если менять их величину. Изменяя переменным потенциометром 103 подачу напряжения на конденсатор 107 и постепенно открывая транзистор 108, подают переменную составляющую, исходящую из конденсатора 107 на ферритовый трансформатор 104 через резистор 97. Пониженное напряжение с вторичной обмотки трансформатора 104 через резистор 95 поступает на управляющий электрод второго тиристора 92. Этот тиристор открывается и на его выходе появляется более длительный по сравнению с управляющим импульс, который включает силовой тиристор 89. Через последний напряжение поступает на электродвигатель 26. Величина подачи напряжения на электродвигатель 26 регулируется переменным потенциометром 103 через замыкающие блок-контакты 111.1 переключателя 111. Контроль за величиной подаваемого напряжения ведется визуально при помощи вольтметра РУ. Нагрузка, потребляемая электродвигателем 26, контролируется автоматически за счет реле 67 максимального тока и визуально амперметром РА. Как только заработал электродвигатель 26, передается вращение через клиноременную передачу 29 на вибратор 28, а через резонансную систему 31 - колебательные движения вибробалкам 35 и 36, на которых находятся формы 32 с массивом. Частота колебаний формы 32 зависит от скорости вращения электродвигателя 26, который работает в зависимости от величины сопротивления переменного потенциометра 103. При изменении величины сопротивления, например потенциометра 99, вручную меняется скорость вращения электродвигателя 26 и соответственно меняется частота вибрации формы 32. Для получения максимального числа оборотов электродвигателя 26 необходимо пользоваться панельным реостатом 83. Он позволяет изменять величину сопротивления в обмотке возбуждения 57, а также скорость вращения электродвигателя 26 от номинальных до максимальных чисел оборотов. Визуальный контроль за работой электропривода можно осуществлять при помощи амперметра РА, питающегося через шунт, контролирующего потребляемую нагрузку, а вольтметра РУ, при помощи которого можно регулировать скорость вращения электродвигателя за счет подаваемого на него напряжения. Остановка работы электродвигателя 26 осуществляется нажатием на кнопку 71. При этом разрывается цепь питания контактора 69, а он размыкает свои нормально открытые контакты 69.1 и 69.2. При размыкании контактов 69.2, обесточивается силовая часть комплекса данного устройства.
Работа устройства заключается в изменении числа вибрации от нуля до максимума в заданных пределах. Процесс изменения частоты вибрации обеспечивает равномерное, ускоренное виброформирование структуры ячеисто-бетонной смеси. В зависимости от роста ячеисто-бетонной смеси меняется число оборотов электродвигателя 26.
В автоматическом режиме устройство управления процессом виброформирования ячеисто-бетонной смеси работает следующим образом.
В акустической системе датчики 40 - 44 настраиваются на разную величину заполнения ячеисто-бетонной смесью формы 32: датчик 40 на - минимальную величину, датчик 44 - на максимальную величину заполнения формы 32. Датчики 41 - 43 соответственно настроены на равные промежутки заполнения формы 32 ячеисто-бетонной смесью. Форма 32, заполненная ячеисто-бетонным массивом, передвигается по технологической линии на виброплощадку 3. Включают переключатель 111, включается в работе система в режиме автоматики, при этом передающий измерительный преобразователь 109 получает питание через включенный тумблер. Акустическая система вступает в работу. Одновременно размыкающие контакты 111.1 переключателя 111 разрываются, обеспечивая работу автоматики. Принцип действия датчиков основан на локации уровня звуковыми импульсами, проходящими через газовую среду, и на явлении отражения этого импульса от границы раздела газ-контролируемая среда. Мерой уровня при этом является время распространения звуковых колебаний от датчиков 40 - 44 до контактируемой границы раздела сред и обратно до датчиков 40 - 44. В последних встроены акустические преобразователи, предназначенные для преобразования подводимых электрических импульсов в акустические и преобразования отраженных импульсов обратно в электрические. Основой акустических преобразователей является пьезокерамический диск, работающий в режиме изгибных колебаний. Форма 32 поступает на виброплощадку 3 с залитым ячеисто-бетонным массивом.
Акустический датчик 40, настроенный на минимальную величину ячеисто-бетонного массива, срабатывает и замыкает свои нормально открытые контакты 40.2 в цепи питания второго реле 63. Одновременно датчик 40 замыкает свои нормально открытые контакты 40.1 в цепи питания резистора, при помощи которого подается переменная величина напряжения. Промежуточное реле 63 срабатывает и замыкает свои нормально открытые контакты 63.1, блокируя кнопку 65 и блок-контакты 40.2. Одновременно реле 63 замыкает замыкающие контакты 63.2. , запитывающие электромагнит 64, управляющий разжатием и сжатием формы 32. Получив питание, электромагнит 64 пневмоприводом и механизмом 38 прижима бортов четырьмя вибробалками 35 зажимает форму 32 на виброплощадке 3. Контроль зажатия формы 32 производит конечный выключатель 39, который при зажатых балках 36 срабатывает и замыкает свой замыкающий контакт 39.1 в цепи питания промежуточного реле 62. Последнее замыкает свои замыкающие контакты 62.1 и этим подготавливается цепь для работы контактора 69. Все предварительные операции произведены, виброплощадка 3 готова работать в автоматическом режиме. При помощи кнопки 70 включается контактор 69, который своими контактами 69.1 блокирует контакты кнопки 70, а также одновременно замыкает свои силовые контакты 69.2 и этим запитывает силовую часть комплекса электропривода. Также подается напряжение на однофазный мостовой выпрямительный мост, включающий четыре вентиля 73 - 76, запитывающие обмотку возбуждения 57. Выпрямительное напряжение с силового блока из четырех вентилей 84 - 87 с минусовой фазой непосредственно поступает на клемму электродвигателя 26, а также на схему управления. Выпрямленное напряжение с плюсовой фазой может поступить на клемму электродвигателя 26 только через управляемый тиристор 89. При замыкании контакта 40.1 происходит минимальное открывание тиристора 89 и на положительную клемму электродвигателя подается минимальное напряжение. Электродвигатель 26 начинает работать на минимальном числе оборотов (заранее заданных через потенциометр 99). Как только заработал электродвигатель 26, передается вращение через клиноременную передачу 29 на вибратор 28, а через резонансную систему 31 колебательные движения передаются вибробалкам 35 и 36, на которых находится форма 32 с массивом. Скорость вспучивания ячеисто-бетонной смеси возрастает равномерно с ростом вибрации формы 32. При достижении вспучивания ячеисто-бетонной смеси 2/5 всей величины формы срабатывает акустический датчик 41, который разрывает свои размыкающие контакты 41.2 в цепи питания потенциометра 99 и замыкает свои замыкающие контакты 41.1 в цепи питания потенциометра 100. Установленная величина сопротивления потенциометра 100 определяет величину открывания силового тиристора 89. Открывание силового тиристора 89 и определяет подачу напряжения на электродвигатель 26 постоянного тока, а соответственно, и его скорость вращения.
Скорость вращения электродвигателя 26 увеличится на 1/5 величины и соответственно увеличится вибрация формы 32 через виброплощадку 3. Увеличение частоты вибрации формы 32 улучшит равномерное распределение ячеисто-бетонной смеси, а также увеличит скорость вспучивания. Как только процесс вспучивания достигнет в форме 32 3/5 всей величины, срабатывает акустический датчик 42, который размыкает свои контакты 42.2 в цепи питания потенциометра 100 и замыкает свои контакты 42.1 в цепи питания потенциометра 101. Установленная постоянно величина сопротивления потенциометра 101 определяет величину открывания силового тиристора 89 схемой управления. Открывание силового тиристора 89 определяет величину подачи напряжения на электродвигатель 26, а соответственно, и его скорость вращения. Скорость вращения электродвигателя 26 увеличивается еще на 1/5 его максимальной скорости и соответственно увеличится вибрация формы 32 через виброплощадку 3. Увеличение частоты вибрации формы 32 улучшает равномерное распределение ячеисто-бетонной смеси, а также увеличивается скорость его вспучивания. Как только процесс вспучивания достигнет в форме 32 4/5 всей величины, срабатывает акустический датчик 43, который разрывает свои контакты 43.2 в цепи питания потенциометра 101 и замыкает свои контакты 43.1 в цепи питания потенциометра 102. Установленная постоянной величина сопротивления потенциометра 99 определяет величину открывания силового тиристора 89 схемой управления. Открывание силового тиристора 89 определяет величину подачи напряжения на электродвигатель 26, а соответственно, и его скорость вращения. Скорость вращения электродвигателя 26 увеличивается еще на 1/5 его максимальной скорости и соответственно увеличивается вибрация формы 32 через виброплощадку 3. Увеличение частоты вибрации формы улучшает равномерное распределение ячеисто-бетонной смеси, а также увеличивается скорость его вспучивания. Как только процесс вспучивания достигает в форме 5/5 всей величины, т.е. ячеисто-бетонная смесь заполняет всю форму и процесс вспучивания можно считать законченным, срабатывает акустический датчик 44, при этом контакты 44.1 замыкаются в цепи питания потенциометра 103, а контакты 43.3 разрывают цепь в цепи питания потенциометра 102. Одновременно блок-контакты 44.2 разомкнутся. Пpи разрыве блок-контактов 44.2 промежуточное реле 63 обесточится и выполнит следующие операции: блок-контакты 63.1, стоящие в цепи блокировки кнопки 65, разрываются, разрываются также контакты 63.2, которые находятся в цепи питания электромагнита 64, управляющего сжатием формы 32. При отключении питания от электромагнита 64 управляющим пневмоприводом и механизмом 38 прижима бортов четыре балки 36 разжимают форму. Контроль разжатия формы 32 фиксирует конечный выключатель 39, который при разжатых балках 36 срабатывает и размыкает свои контакты в цепи питания реле 62. Промежуточное реле 62 размыкает свои контакты 62.1 и обесточивает катушку контактора 69. Контактор 69 разрывает свои контакты 69.1, производящие блокировку кнопки 70, а также разрывает свои силовые блок-контакты 69.2, которые запитывают весь комплекс устройства. При разрыве силовых контактов 69.2 контактора 69 вся система приходит в исходное положение.
Устройство управления процессором виброформирования ячеисто-бетонной смеси работает устойчиво в автоматическом режиме.
Применение изобретения позволяет в виброплощадках по производству ячеистого бетона применить электропривод с плавным автоматическим регулированием скорости вращения с возможностью запрограммированного включения вибрации и осуществления ускоренного равномерного процесса вспучивания и перемешивания ячеисто-бетонной смеси. Изобретение позволяет иметь прямую и обратную связи с плавным бесступенчатым управлением работой в ручном и автоматическом режимах с дополнительным визуальным контролем с пульта управления.
Данный электропривод прост по конструкции, в изготовлении, не трудоемок, высоконадежен, долговечен, а работа устройства резко повышает производительность, улучшает эргономические показатели, позволяет автоматизировать сложные технологические процессы, а также делает весь цикл изготовления ячеистого бетона непрерывным. Увеличивается эксплуатационная производительность за счет сокращения выполнения всех операций, а также исключения возможных ошибок оператором и совершения поломок виброплощадки и самого устройства, а также повреждения ячеистого бетона при изготовлении.
Достижение положительного эффекта при применении данного устройства на виброплощадках по изготовлению ячеистого бетона заключается в следующем: использование устройства позволяет обеспечить автоматизацию технологического процесса при непрерывности цикличности работы виброплощадки, повысить производительность работ, цикл сделать замкнутым, ячеистый бетон получают качественным за счет равномерного плавного автоматизированного процесса смешивания и роста вспучивания ячеисто-бетонной смеси в форме на виброплощадке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| Устройство для подачи сварочной проволоки | 1985 |
|
SU1269937A1 |
| Устройство для защиты электродвигателя от перегрузки | 1981 |
|
SU974493A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1991 |
|
RU2011285C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРАВЛЕНИЕМ НА ПОЛУПРОВОДНИКОВЫХ УСТРОЙСТВАХ | 2007 |
|
RU2334629C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВИБРАТОРА | 2003 |
|
RU2239935C1 |
| Электропривод для автоматического удержания вала насосного агрегата | 1984 |
|
SU1319214A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2227364C2 |
| Электропривод | 1990 |
|
SU1786625A1 |
| Устройство для управления трехфазным асинхронным электродвигателем | 1987 |
|
SU1539944A1 |
Использование: автоматизация процесса виброформования крупноразмерных массивов из газосиликатных смесей. Сущность: устройство позволяет в виброплощадках по производству ячеистого бетона применить электропривод с автоматическим регулированием скорости вращения, с возможностью запрограммированного включения вибрации, осуществления ускоренного равномерного процесса вспучивания и перемешивания ячеистобетонной смеси. Устройство содержит пять датчиков уровня заполнения формы и схему управления приводом виброплощадки. 5 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления процессом структурообразования при виброударном формовании ячеистобетонной смеси и устройство для его осуществления | 1985 |
|
SU1294607A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
