1
Изобретение относится к вычислительной технике и может быть использовано в устройствах обработки информации, осуществляющих определение синусной и косинусной составляющих вектора, преобразование координат, генерирование синусоидальных сигналов, сдвинутых на четверть периода.
Известен синусно-косинусный преобразователь, содержащий запоминающее устройство, в котором хранятся табличные значения синуса и косинуса всех точек преобразования СП.
Недостатком преобразователя является значительное увеличение оборудования при увеличении количества точек преобразования и точности получаемых значений.
Наиболее близким по технической сущности к предложенному является преобразователь, содержащий регистры синуса и косинуса и сумматоры синуса и косинуса и блок синхронизации, причем выход регистра синуса подключен к первому входу сумматора синуса, выход регистра косинуса подключен к первому входу сумматора косинуса, установочные входы регистров синуса и косинуса соединены с входами устройства, выходы сумматоров синуса и косинуса подключены ко входам регистров синуса и косинуса соответственно, вход блока синхронизации соединен с управляющим входом уст10ройства, выход тактовых импульсов блока синхронизации соединен с импульсными входами регистров синуса и косинуса, управляющие входы которых соединены с выходом управле15ния установкой блока синхронизации 2.
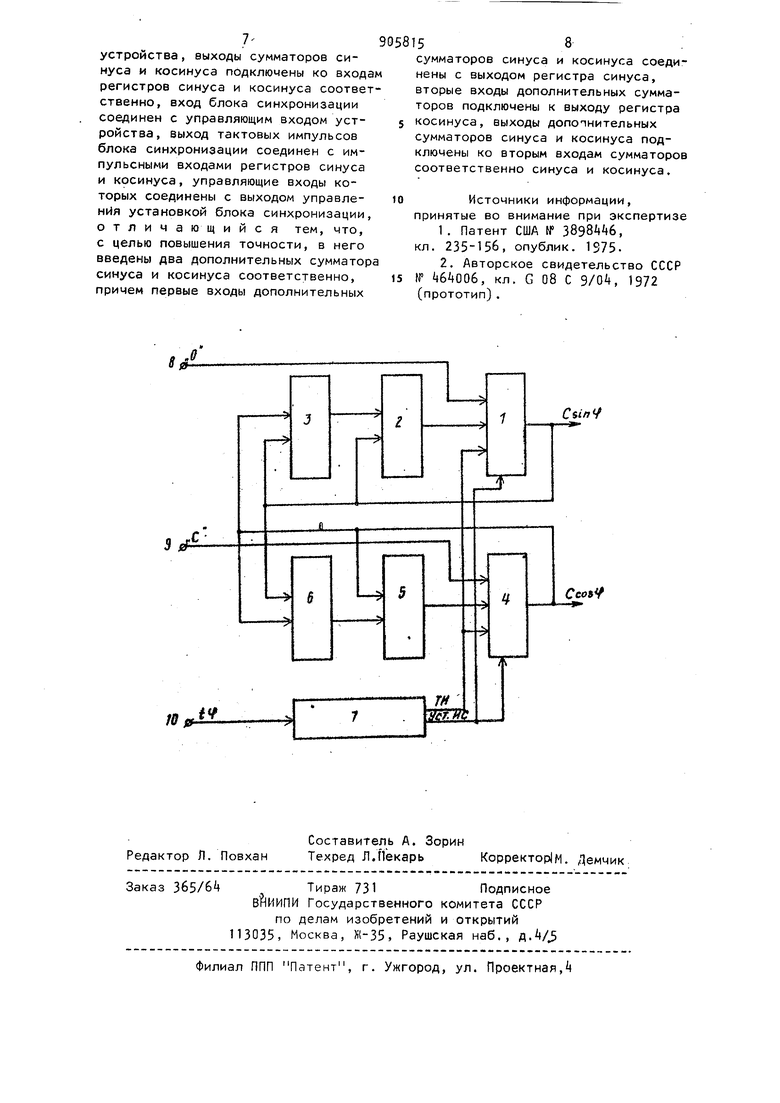
Недостатком устройства является значительная погрешность интерполя20ции, что вынуждает для повышения точности вводить дополнительные узловые точки внутри квадранта, т.е усложнять шифратор. 3 Цель изобретения - повышение то ности преобразования и расширение функциональных возможностей преобразователя . Поставленная цель достигается тем, что в устройство, содержащее регистры синуса и косинуса и сумматоры синуса и косинуса и Слок синхронизации, причем выход регистр синуса подключен к первому входу сумматора синуса, выход регистра косинуса подключен к первому входу сумматора косинуса, установочные входы регистров синуса и косинуса соединены с входами устройства,выхо ды сумматоров синуса и косинуса под ключены ко входам регистров синуса и косинуса соответственно, вход бло ка синхронизации соединен с управля ющим входом устройства, выход тактовых импульсов блока синхронизации соединен с импульсными входами регистров синуса и косинуса, управляю щие входы которых соединены с выходом управления установкой блока синхронизации, дополнительно введены два сумматора синуса и косинуса соответственно, причем первые входы дополнительных сумматоров синуса и косинуса соединены с выходом регистра синуса, вторые входы дрполнительных сумматоров подключены к выходу регистра косинуса, выходы дополнительных сумматоров синуса и косинуса подключены ко вторым входам сумматоров соответственно синуса и косинуса. На чертеже представлена блок-схе ма устройства. Устройство содержит регистр синуса ,1 , сумматор синуса 2, дополнительный сумматор синуса 3, регистр косинуса 4, сумматор косинуса 5 дополнительный сумматор косинуса 6 и блок синхронизации 7, установочные входы регистров 8 и 9. управляющий вход устройства 10. Блок синхрониза ции 7 содержит два стандартных генератора: генератор одиночного импульса установки регистров в исходное состояние и генератор тактовых импульсов преобразования. Управление генераторами осуществляется командой со входа 10, длительность которой пропорциональна величине фа зового угла. Устройство работает следующим образом. 4 С поступлением команды управления установкой и преобразованием со входа 10 блок синхронизации 7 вырабатывает импульс установки исходного состояния. Импульсом установки исходного состояния регистр 1 устанавливается в состояние О со входа 8, а в регистр k в двоичном коде заносится значение амплитуды вектора со входа 9- На дополнительном сумматоре 3 синуса из значения, установленного в регистре k косинуса,вычитается со сдвигом на (Р + Т) разрядов в сторону младших значение,установленное в регистре 1. Результат со сдвигом на Р разрядов в сторону младших подается на сумматор 2 синуса и суммируется со значением,установленным в регистре 1. На дополнительном сумматоре 6 косинуса значение, установленное в регистре 1, суммируется со сдвинутым на (Р + 1} разрядов в сторону младших значениeM.j установленным в регистре k. Полученное значение со сдвигом на Р разрядов 6 сторону младших подается на сумматор 5 косинуса и вычитается из значения, установленного в регистре . По команде управления преобразованием со входа 10 блок синхронизации 7 Вырабатывает тактовые импульсы преобразования, количество которых пропорционально фазовому углу, которые поступают на импульсные входы регистров 1 и А. С приходом тактового импульса преобразования происходит занесение полученных на выходах сумматоров 2 и 5 значений соответственно в регистры 1 и . С поступлением каждого нового тактового импульса преобразования в регистрах 1 и устанавливаются новые значения,величины которых изменяются по синусоидальному и косинусоидальному законам соответственно. Таким образом, поступление очередного импульса преобразования как бы осуществляет поворот вектора на определенный фазовый угол. Если количество тактов преобразования соответствует заданному фазовому углу, то в регистрах 1 и k устанавливаются соответственно значения синусной и косинусной составляющих заданного вектора. А у. - значение синусной составляющей , полученной на К-ом шаге преобразования, В х - значение косинусной составляющей, полученной на К-ом шаге преобразования; С ц - значение ам5плитуды вектора на К-ом шаге преоб разования; Р - количество разрядов сдвига в сторону младших разрядов входе сумматора одного слагаемого по отношению к другому (Г О, 1, 2. . .), 0. . Тогда на (К + 1) шаге преобразо ния в соответствии со схемой, пред ставленной на чертеже, получают (, Определяют амплитуду вектора С после (К + 1) шага преобразования ,г 1 W H i 4r -YV K iVi|V (A,i |4b4 .4 4 : + й 1 , L.. - J I -t- , I -(- р U Ч arctc -----л 1 а Поскольку б.« 1 , то с большой степенью точности можно считать , . piiv) г 1, тогда Таким образом, на (К + 1) шаге преобразования осуществляется пово рот вектора С на угол л . За m шагов преобразования происходит по ворот вектора С о на угол Ц-г V-4i ei -. Множитель , определяет погреш ность преобразования, обусловленну изменением амплитуды вектора в про цессе преобразования. Увеличивая значение Р, можно производить преобразование с меньшим шагом по фаз ;И меньшей погрешностью, однако при этом увеличивается время преобразо вания. Сравнивают погрешности преобраз вания (интерполяции), получаемые вследствие изменения амплитуды век тора, для известного и предлагаемо устройств. Аналогичным образом и с аналогичными допущениями найден ное для известного значение множи56теля, определяющего изменение амплитуды вектора за один шаг преобразования , равно f-JT г..- 11 (.х-х„) . 1 л где (X-XQ) - шаг аргумента. Применяя принятые обозначения, получают для известного V 1 f В предлагаемом устройстве d Таким образом, погрешность преобразования предлагаемого устройства в - раз меньше чем у известноCl-го. Например, для значения (шаг преобразования по фазе д 4 ), погрешность преобразования Г1редлагаемого устройства меньше примерно в 1000 раз, чем у известного. Расширение функциональных возможностей предлагаемого устройства заключается в том, что,во-первых, в предлагаемом устройстве синус-косинусному преобразованию подвергается установленная амплитуда вектора. Во-вторых, предлагаемое устройство позволяет осуществить операцию определения амплитуды вектора, и фазового угла по устанавливаемым в регистры значениям синусной и косинусной составляющих. Для этого осуществляется поворот вектора до изменения знака одной из составляющих. 8 момент изменения знака одной составляющей в регистре другой составляющей устанавливается значение амплитуды вектора, а количество шагов преобразования свидетельствует о фазовом сдвиге. Формула изобретения Цифровой синусно-косинусный преобразователь , содержащий регистры синуса и косинуса, сумматоры синуса и косинуса и блок синхронизации,причем выход регистра синуса подключен к первому входу сумматора синуса, выход регистра косинуса подключен к первому входу сумматора ксгсинуса, установочные входы регистров синуса и косинуса соединены с входами устройства, выходы сумматоров синуса и косинуса подключены ко вход регистров синуса и косинуса соотве ственно, вход блока синхронизации соединен с управляющим входом устройства, выход тактовых импульсов блока синхронизации соединен с импульсными входами регистров синуса и косинуса, управляющие входы которых соединены с выходом управления установкой блока синхронизации отличающийся тем, что, с целью повышения точности, в него введены два дополнительных сумматор синуса и косинуса соответственно, причем первые входы дополнительных 158 сумматоров синуса и косинуса соединены с выходом регистра синуса, вторые входы дополнительных сумматоров подключены к выходу регистра косинуса, выходы дополнительных сумматоров синуса и косинуса подключены ко вторым входам сумматоров соответственно синуса и косинуса. Источники информации, принятые во внимание при экспертизе 1 . Патент США W 3898i i 6, кл. 235-156, опублик. 1S75. 2. Авторское свидетельство СССР № 464006, кл. G 08 С 9/04, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Цифровое устройство для измерения фазового угла | 1980 |
|
SU960658A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| Цифровое устройство измерения параметров гармонических сигналов | 1984 |
|
SU1182425A1 |
| Адаптивный групповой приемник многочастотного кода с импульсно-кодовой модуляцией | 1989 |
|
SU1830632A1 |
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
| Генератор синусоидальных колебаний | 1987 |
|
SU1423998A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
