Изобретение относится к электротехнике и может быть использовано в системах автоматического управления и роботизированных комплексах для управления шаговыми электродвигателями (шэд) с электрическим дроблением шага с помощью синусно-косинусного датчика положения.
Цель изобретения - повышение поме хоустойчивости и упрощение,
На чертеже приведена структурная схема устройства управления шаговым электродвигателем (ШЭД) с датчиком положения в виде синусно-косинусного вращающегося трансформатора (СКВТ),
Для простоты изложения принято, что число пар полюсов ШЭД и СКВТ совпадает. В реальнь1х устройствах такое согласование достигается за счет применения механической или электрической редукции между роторами ШЭД и СКВТ,.
Устройство содержит ШЭД 1, ротор которого связан механически с ротором СКВТ 2, вход которого связан с шиной опорного напряжения (УЮН) 3 Выходы СКВТ 2 соединены с.сигнальными входами соответствующих демодуляторов ( ДМ) 4 и 5, коммутационные входы которых соединены с ШОН 3. Выходы ДМ 4 и 5соединены с соответствующими входами первого формирователя (F) 6, цифровой выход которого связан с вторым входом второго цифрового синусно-косинусного преобразователя (ЦСКП) 7. Аналоговые выходы первого формирователя (F) 6 соединены с входами соответственно первого перемножающего цифроаналого™ вого преобразователя (ПЦДП) 8 и второго ПЦАЛ 9, цифровые аналоговые входы которых соединены с соответст™ вующими выходами второго ЦСКП 7. Выходы ПЦАП 8 и 9 соединены с соответствующими входами компаратора 10, вьЕх;од которого соединен с входом IK-триггера (т) 11, выход которого соединен с информационным входом регистра RC 12. Тактовый вход RC 12 соединен с выходом второго форми- ровчтеля (F) 13, вход которого соединен с генератором импульсов ГТИ 14 Выход регистра 12 соединен с первым входом второго ЦСПК 7 и вторым входом сумматора (ЗМ) 15, первый вход которого соединен с выходом блока управления БУ 16. Выход сумматора 15 соединен с первым входом
15
20
25
Ю
. , 520647
первого ЦСКП 17, выходы которог О соединены соответственно с цифровыми входами третьего и четвертого ПЦАП 18 и 19, аналоговые входы которых соединены соответственно с выходами ДМ 5 и 4.
Выходы ПЦАП 18 и 19 соединены с входами широтно-импульсных модуляторов (ШИМ) 20 И 21, выходы которых соединены с соответствующими управляющими входами усилителя мощности (УМ) 22, выходы которого соединены с соответствующими входами ШЭД 1. Коммутационный вход УМ 22 соединен с вторыми входами ЦСКП 7 и 17 и цифровым выходом первого формирователя 6 .
Второй формирователь 13 содержит ряд одновибраторов8 задающих цикл преобразования с интервалами, величина которых варьируется в зависимости от значения текущего разряда, например от 12 до 35 МКС для К564ИР13. Устройство работает следующим образом.
В статике, когда код Фи на выходе БУ 16 не меняется, роторы ШЭД 1 и СКВТ 2 неподвижны. Выходные сигналы СКВТ 1, пропорциональные синусу Ug U(,sin9 и косинусу Ut Uo cos 0 угла 9 поворота ротора, подвергаются фазочувствительному выпрямлению (синхронному детектированию) ДМ 3 и 4, на коммутационные входы которых
30
35
40
45
50
55
подается напряжение Ug с шины 3. Это позволяет сформировать на выходе ДМ 4 и 5 напряжения U ;, и U постоянного тока, представляющие ана-- логовые эквиваленты синусной и косинусной составляющих угла поворота .ротора ШЭД 1 и СКВТ 2,
Инвертирование U и U в формирователе 6, т.е. формирование -II;, И -Uj, позволяет получить систему из четырех напряжений. Оценка взаимных фазовых и амплитудных соот ношений текущих значений этих напря™ жений позволяет сформировать на цифровом выходе формирователя 6 трехразрядный код октанта Ф, представляющий старшие по весу разряды (СВР) цифрового эквивалента угла б поворота ротора СКВТ 2. Этот код позволяет привести входные напряжения (F) 6 и, и и в первый октант, т.е. сформировать его выходные напряжения Ug sin 0 и и созоб, где об - угол поворота ротора 6 СКВТ 1, приведенный в первый октант.
Приведенные напряжения Л и U поступают на входы П11ЛП 8 и 9, где перемножаются с цифровыми эквивален- тами косинусной Ф,-, н синусной составляющих цифрового эквивалента . В результате перемножения на выходе ГЩАП 8 формируется напряжение и sin об-Фсы., а на выходе ПЦАП 9
и cost/.
Ф
пряжений на выходах ГЩАП 18 и 19 и соответствующих им напряжений U.f, и и по отношению к напряжениям U, и и, приводит к увеличению скорости движения, а уменьшение - к ее снижению. Движение роторов ШЭД 1 и СКВТ 2 происходит до тех пор, пока изменяется Фи. Его увеличение соответст5oi,, которые подаются на
Q вует вращению в одном направлении, соответствующие входы компаратора 10. уменьшение,- в другом. На его выходе формируется напряжение Использование преобразователя и Uj- - Ug 5±по1 Ф - амплитуда-код (ПАК) компенсацинного sin( оС- ).типа позволяет, сохранив высокое
Цифровой эквивалент Ф формируется 15 быстродействие прототипа, существен- циклически в RG 12 методом последовательных приближений. Информационная часть устройства управления ШЭД, содержащая узлы 2-14, обеспечивает формирование кода Ф компенсационным
но повысить помехоустойчивость информационной части, состояЕций из узлов 2-14.
Выполнение информационной части
20 устройства управления ШЭД 1 по такой схеме оказывается эквивалентным применению СКВТ 2 в качестве датчика в трансформаторной дистанционной передаче угла, где роль электронного
методом на основании сведения к нулю сигнала IJ, , что имеет место в случае.
Ф,
об
когда sinift - Ф О, т.е. oi Код представляет младшие по весу разряды (МБР) цифрового эквивалента угла 0 поворота ротора СКВТ 2.
Цифровой эквивалент Ф поступает на второй вход сумматора 15, на первый вход которого поступает код Фи
20 устройства управления ШЭД 1 по такой схеме оказывается эквивалентным применению СКВТ 2 в качестве датчика в трансформаторной дистанционной передаче угла, где роль электронного
25 аналога СКВТ-приемника ньшолняет совокупность узлов 4-6, 8-10, а роль электромеханической релейной следящей системы - ее электронный эквивалент.
состоящий из узлов 7, 11-14. Это позс выхода БУ 16. Ограничения на вепи- 30 воляет использовать для запитки ШЭД 1 чину кода Фи в предлагаемом устройст- и СКВТ 2 единый источник питания (не ве и известном аналогичны и определяются условиями синхронизации рото- ра ШЭД 1 в пределах полюсного деления.
показан) и отказаться от экранировки и гальванической развязки в силовой и информационной частях ус тройпряжений на выходах ГЩАП 18 и 19 и соответствующих им напряжений U.f, и и по отношению к напряжениям U, и и, приводит к увеличению скорости движения, а уменьшение - к ее снижению. Движение роторов ШЭД 1 и СКВТ 2 происходит до тех пор, пока изменяется Фи. Его увеличение соответствует вращению в одном направлении, уменьшение,- в другом. Использование преобразователя амплитуда-код (ПАК) компенсацинного типа позволяет, сохранив высокое
15 быстродействие прототипа, существен-
но повысить помехоустойчивость информационной части, состояЕций из узлов 2-14.
Выполнение информационной части
20 устройства управления ШЭД 1 по такой схеме оказывается эквивалентным применению СКВТ 2 в качестве датчика в трансформаторной дистанционной передаче угла, где роль электронного
25 аналога СКВТ-приемника ньшолняет совокупность узлов 4-6, 8-10, а роль электромеханической релейной следящей системы - ее электронный эквивалент.
воляет использовать для запитки ШЭД 1 и СКВТ 2 единый источник питания (не
показан) и отказаться от экранировки и гальванической развязки в силовой и информационной частях ус трой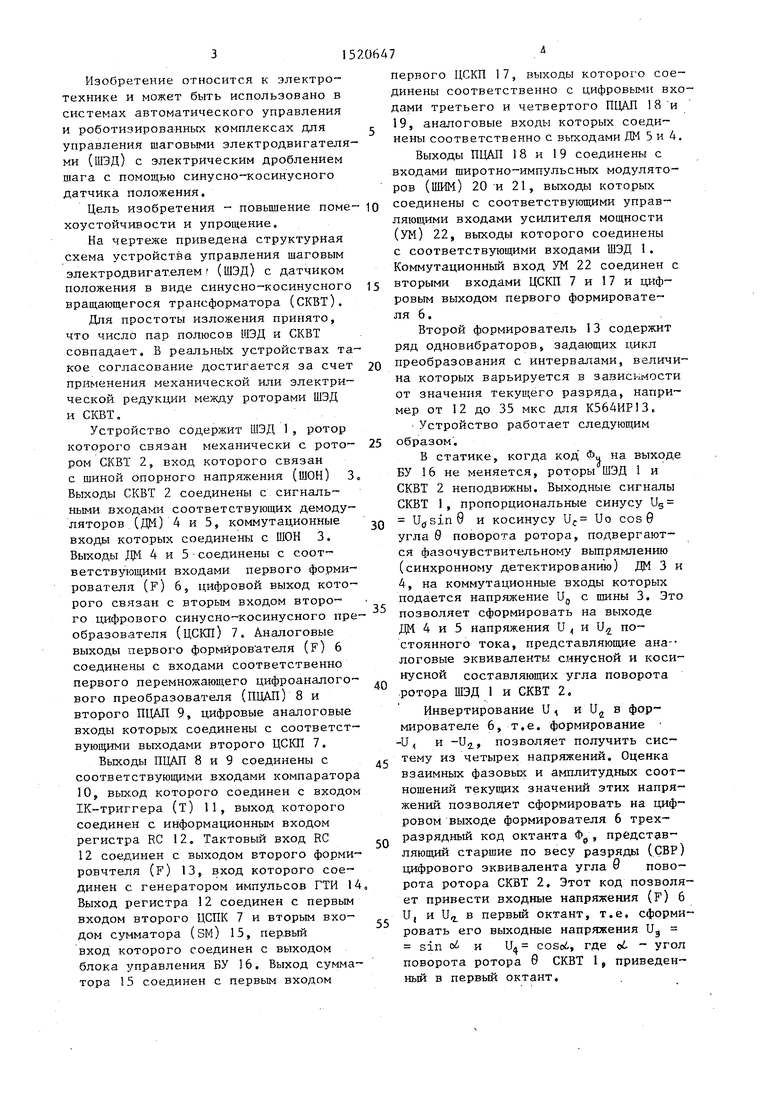
| название | год | авторы | номер документа |
|---|---|---|---|
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1120383A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| Следящий преобразователь угла поворота вала в код | 1984 |
|
SU1243092A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1113830A2 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угла поворота вала в код с самоконтролем | 1987 |
|
SU1462484A1 |
Изобретение относится к электротехнике и может быть использовано в приводе роботов и манипуляторов, где требуется повышенная точность позиционирования. Цель изобретения - повышение помехоустойчивости и упрощение устройства. Устройство управления шаговым двигателем 1 содержит датчик положения в виде синусно-косинусного вращающегося трансформатора (СКВТ) 2, запитываемого от шины 3 опорного напряжения, демодуляторы (ДМ) 4 и 5, сигнальные входы которых соединены с выходами СКВТ 2, а коммутационные - с шиной 3. Устройство работает в режиме самокоммутации с электрическим дроблением шага. Угол коммутации задается блоком 16 управления и поступает на вход сумматора 15. Помехоустойчивость повышается применением преобразователя амплитуда - код компенсационного типа и широтно-импульсных модуляторов 20 и 21. 1 ил.
Код Фи задает угол коммутации ШЭД 1 , 35 управления ШЭД.
работающего в режиме самокоммутации. Информация о текущем значении угла поворота роторов ШЭД 1 и СКВТ 2 по- ступает в управляющую часть устройЦифроаналоговое п управляющего воздейс формированием сигнал ной связи по положен
ства, образуемую узлами 17-22, в ви- 40 Это осуществляется умножением вьпсодде аналоговых сигналов U, и U2, поступающих на аналоговые входы ПЦАП 19 и 18.
Изменение кода Фи вызывает изменение кода Ф. и кодов синуса Ф и косинуса Ф, которые поступают на цифровые входы ПЦАП 18 и 19, на выходах которых формируются кваэи - гармонические напряжения, опережаю-
ных сигналов ЦСКП 17 на аналоговые эквиваленты U и U угла поворота ротора СКВТ 1. На выходах ПЦАП 18 и 19 формируются непрерывные сигна 45 лы управления, дальнейшее преобразование которых производится ШИМ 20 И 21.
Введение контура местной обратной
щие или отстающие по фазе от напряже- 50 расширяет функциональные воз- ний и и Uj. Выходные аналоговые напряжения ПЦАП 18 и 19 преобразуются ШИМ 20 и 21 в импульсные напряжения U({ и и , поступающие на
можности устройства управления, обеспечивая реализацию минишагового управления в режиме самокоммутации. . Помимо увеличения точности и быстроуправляющие входы УМ 22, на коммута- jS Действия, это повьш1ает помехоустойчивость канала управления, упрощение которого достигается за счет использования в УМ 22, ЦСКП 7 и 17 кода октанта Ф, формируемого формиционные входы которого поступает код октантов Ф,, обеспечивающий пооктантное переключение выходных элементов УМ 22. Рост опережения на-
управления ШЭД.
Цифроаналоговое преобразование управляющего воздействия совмещено с формированием сигнала местной обратной связи по положению ротора ШЭД 1.
40 Это осуществляется умножением вьпсодных сигналов ЦСКП 17 на аналоговые эквиваленты U и U угла поворота ротора СКВТ 1. На выходах ПЦАП 18 и 19 формируются непрерывные сигна 45 лы управления, дальнейшее преобразование которых производится ШИМ 20 И 21.
Введение контура местной обратной
расширяет функциональные воз-
можности устройства управления, обеспечивая реализацию минишагового управления в режиме самокоммутации. . Помимо увеличения точности и быстроДействия, это повьш1ает помехоустойчивость канала управления, упрощение которого достигается за счет использования в УМ 22, ЦСКП 7 и 17 кода октанта Ф, формируемого форми 152064
рорателем (Р) 6 (фиг.2). Немаловаж- }1ым преимуществом является унификация выполнения функциональных тригонометрических преобразователей информационного (ЦСКП 7, ШЩ 8 и 9) и управляющего (ЦСКП 17, ПЦАП 18 и 19) каналов устройства, реализованных на основе БИС ПЗУ и ЦАП широкого применения, что упрощает изготовление устройства и его эксплуатацию.
10
Формулаиз,обретения
Устройство для управления шаговым электродвигателем с датчиком положа™ НИЛ в виде синусно-косинусного вращающегося трансформатора, по ключен ного к шине опорного, напряжения, со держащее два демодулятора, сигнальные -входы которых соединены с соответствующими выходами синусно-коси- нусного вращающегося трансформатора, коммутационные с шиной опорного iнапряжения, первый формирователь, входы которого соединены с выходами соответствующих демодуляторов, генератор тактовых импульсов, блок управления, выход которого соединен с первым входом сумматора, первый цифровой синусно-косинусный преобразователь, усилитель мощности, выходы которого соединены с соответствующими входами шагового электродвигателя отличающееся тем, что, с целью повьш1ения помехоустойчивости и упрощения, дополнительно введены первый, второй, третий и четвертьй перемножающие цифроаналоговые преобРедактор А.Мотьшь.
Составите пь В.Алфимов
Техред Л.Олийнык Корректор С.Черни
Заказ 6768/56
Тираж 551
ВЯИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
8
разователи, компаратор, триггер, регистр, вторые формирователь и цифровой синусно-косинусный преобразователь, первый и второй широтно-импульс- ные модуляторы, выходы которых соединены с соответствующими управляющими входами усилителя мощности, а входы -° с выходами третьего и четвертого перемножающих цифроаналогоных преобразователей, аналоговые входы которых соединены с выходами соответствующих демодуляторов, а цифровые - с соответствующими выходами первого цифрового синусно-косинусного преобразователя, первый вход которого соединен с выходом сумматора, второй вход которого соединен с выходом регистра, тактовый вход которого соединен с входом генератора тактовых импульсов через второй формирователь, а выход - с первым входом второго цифрового синусно-косинусного преобра:зователя, соответствующие выходы которого соединены с цифровыми входами первого и второго перемножающих цифроаналоговых преобразователей, аналоговые .входы которых соединены с соответствующими аналоговыми выходами первого формирователя, выходы I- с соответствующими входами компаратора, выход которого через триггер соединен с информационным входом регистра, а цифровой выход первого формирователя соединен с вторыми входами первого и второго цифровых синусно-косинусных преобразователей и коммутационным входом усилителя мощности.
Подписное
| Авторское свидетельство СССР ,№ 936340, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
