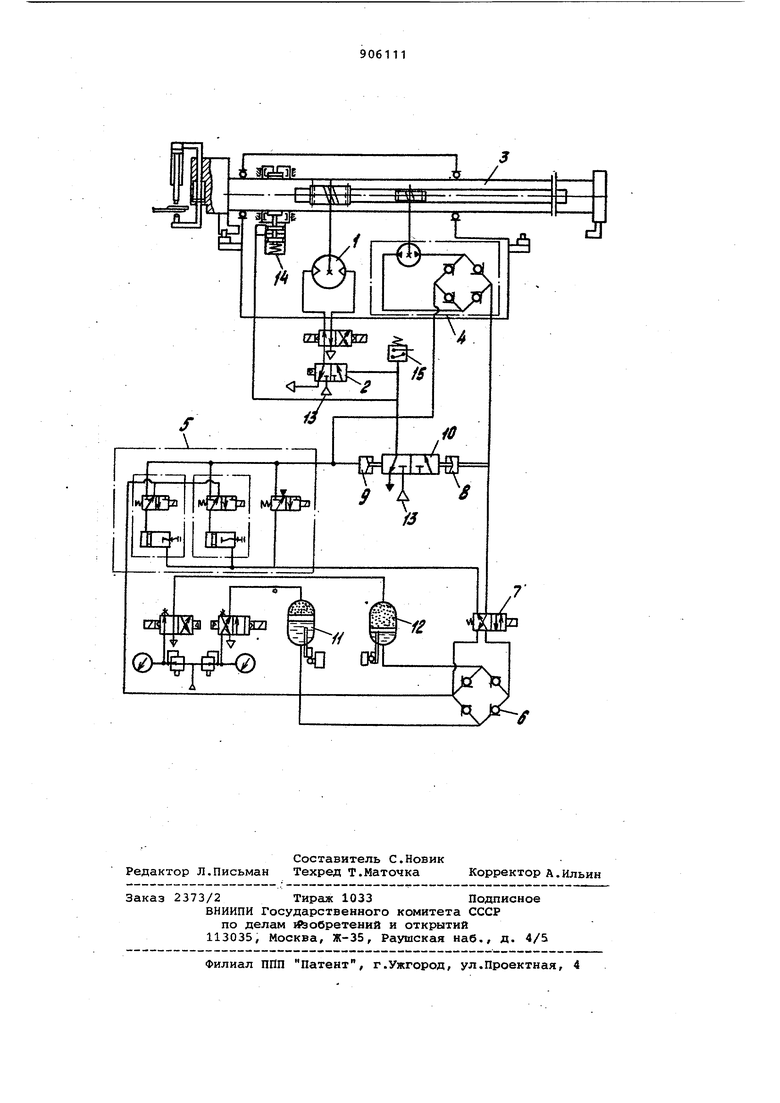
;о о. Изобретение относится к области машиностроения и, в частности, може быть использовано в конструкциях пр г/ыииенных роботов для создания возвратно-поступательного перемещения его исполнительного органа. Известен привод линейного переме щения, содержащий силовой цилиндр с основным золотником, датчик обрат ной связи, выполненный в виде гидрав лического устройства, соединенного гидролиниями с дросселирующим устройством и источником питания ij . Известный привод не обеспечивает жесткой фиксации исполнительного ор гана, что влияет на точность его пози ционирования. Цель изобретения - устранение ука занного недостатка. Цель достигается тем, что привод снабжен гидравлическим тормозным уст ройством и дополнительным золотником связанным гидравлическими линиями с полостями тормозного устройства и основного золотника, а источник пита ния содержит обратные клапаны, соединенные по мостовой схеме, к одной диагонали которой подключены полости дополнительного золотника и датчи ка обратной связи, а к другой - дополнительно введенные пневмогидравлические вытеснители. На чертеже приведена схема привода линейного перемещения манипулятора. привод манипулятора содержит силовой цилиндр 1 с основным золотником 2, кинематически связанный со .штангой 3 исполнительного органа и датчиком 4 обратной связи, выполненным в виде гидравлического устройства и соединенным гидролиниями с дозирующим устройством 5 и с источником питания цепей обратной связи, выполненным в виде обратных клапанов 6j соединенных по мостовой схеме. в одну диагональ которой через управ ляющий распределитель 7 пара1шельно подключены полости 8 и 9 управления дополнительного золотника 10 и датчик 4 обратной связи, последовательно которым подключено дозирующее уст ройство 5, а в другую диагональ включены два пневмогидравлических вытеснителя 11 и 12 с аппаратурой управления. Один из выходов дополнительного золотника 10 соединен с источником 13 рабочей среды, а другой с управляющей полостью основного золотника 2 и с полостью управления гидравлического тормозного устройства 14. Привод линейного перемещения работает следующим образом. Подачей команды на распределитель 7 масло от одного из пневмогидравлических вытеснителей 11 и 12 поступает в цепь датчика 4 обратной связи и в управляющую полость 8 дополнительного золотника.10, который, перемещаясь влево (по чертежу), связывает источник 13 рабочей среды с полостятда управления основного золотник% 2 и тормозного устройства 14 таким образом, что тормозное устройство 14 растормозит штангу 3 раньше, чем Начнет перемещать штангу 3 исполнительного органа, например манипулятора, и тем самым заставит работать датчик 4, который дает сигнал на создание давления и заполнение объемов дозирующего устройства 5. Когда рабочий объем дозирующего устройства 5 будет заполнен, возрастает давление в полости 9 упрс1Вления дополнительного золотника 10, что вызовет перемещение золотника 10 в исходное положение. При этом тормозное устройство жестко и надежно зафиксирует штангу 3, а основной золотник 2 обеспечит выключение силового цилиндра 1. Датчик 15 давления даст команду на отключение распределителя 7 и освобождение рабочих объемов дозирующего устройства 5 для осуществления пов- . торного цикла. Различные по величине позиционные перемещения иеполнительного органа достигаются количеством и последовательностью включения рабочих объемов дозирующего устройства. Таким образом, предложенный привод обеспечивает повышение точности, и жесткости фиксированных положений исполнительного органа, например манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1982 |
|
SU1060463A1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 1995 |
|
RU2109167C1 |
| Пневмогидравлический привод | 1980 |
|
SU931987A2 |
| Гидропривод возвратно-поступательного насоса | 1982 |
|
SU1087685A1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
| Пневмогидравлический привод | 1979 |
|
SU821759A1 |
| Пневмогидравлический привод | 1984 |
|
SU1247585A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ТРУБОПРОВОДА | 2002 |
|
RU2220362C1 |
| Пневмогидравлический привод | 1983 |
|
SU1114821A2 |
ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ, например, исполнительного органа манипулятора, содержащий силовой цилиндр с основным золотником, датчик обратной связи, выполненный в виде гидравлического устройства, соединенного гидролиниями с дозирующим устройством и с источником питания, о тличающийся тем, что, с целью повышения точности позиционирования исполнительного органа, он снабжен гидравлическим тормозным устройством и дополнитель«ым золотником, связанным гидролиниями с полостями тормозного устройства и основного золотника а источник питания содержит обратные клапаны, соединенные по мостовой схеме, к одной диагонали которой подключены полости дополнительного золотника и датчика обратной связи, а к другой - дополнительно введенные пневмогидравлические - ВЕЭтеснители.«с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
