О
о
4
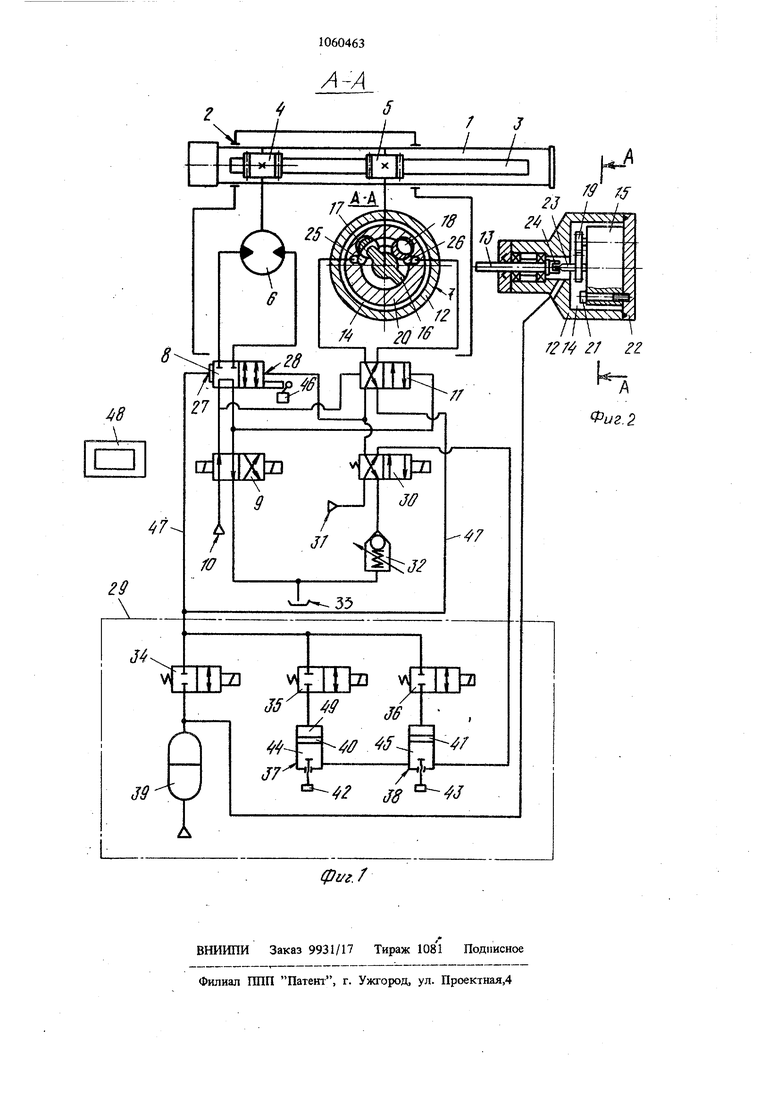
Oi О) Изобретение относится к машиностроению, в частности к манипуляторам с программным управлением к может найти применение при создании промышленных роботов для контактной точечной сварки, прессовых и других работ. Известен модуль промышленного ротора, содержаший расположенную в направляющих штангу с силовым приводом и золотником, объемный датчик обратной связи и дозирующее устройство с регулируемым объемом гидравлического упора 1. Недостатком этого устройства является выполнение датчика обратной связи в виде полого цилиндра в полости обратной связи, что создает различные режимы переключения золот ника при перемещении штанги в против огюлож ных направлениях, что снижает эксплуатационisyio надежность и точноста позиционирован}-ш. Известен также модуль промышленного робота, содержащий расположенную в направляю щих штангу с силовым приводом и золотником, пусковой золотник, объемный датчик об ратной связи с двумя полостями и поворотны приводом от штанги и дозирующее устройство с регулируемыми объемами гидравлических упоров 2. Недостатком этого модуля промышленного робота является низкая точность позидионирования, зависящая от упругих свойств рабочей жидкости и положения датчика обратной связи V Цель изобретения - повышение тошости по зиционирования. Указанная цель достигается тем, что модуль промьщщенного робота снабжен дополнительным распределителем, герметичной обоймой с валом и ролико-лопастной машиной, помешенной внутри указанной обоймы, при этом вал обоймы одним кондом через дополнительно введенную компенсационную муфту, соединен с валом ролико-лопастной машины, а другим коном связан со штангой, кроме того, напорная и сливная полости ролико-лопастной машины через дополнительный распре делитель подсоединен к основному распределителю и пусковому клапану, а полость герметичной обоймы связана с дозирующим устройством. На фиг. 1 представлена система управления модуля промышленного робота, разрез А-А на фиг.2; на фиг. 2 - конструктивное вьшолнение датчика обратной связи. Штанга I размещена в направляющих 2 и посредством рейки 3 и шестерней 4 и 5 связана с силовым приводом в виде гидромотора б и датчиком 7 обратной связи. Питание гидромотора 6 осуществляется через золотник 8 и реверсивный распределитель 9 от насоса 10. Лдтчик 7 обратной связи состоит вз распределителя 11, герметичной обоймы 12 с приводным валом 13, кинематическ связанным со штангой 1 через шестерню 5; в полость 14 обоймы 12 помещена ролико-лопастная гидромашина 15, состоящая из ротора 16, роликов 17 и 18, связанных между собой шестернями 19, статора 20, закрепленного болтом 21 на крышке 22 обоймы 12. Вал 29 ротора 16 связан через муфту 24 с приводным валом 13. Полости 25 и 26 считьшающего устройства 15 гидравлически связаны через роспределитель 11с управляющими полостями 27 и 28 золотника 8. Полость 27 является дифференциальной по сравнению с полостью 28. Кроме того, торцовая полость 27 золотника 8 связана с дозирующим устройством 29, а торцовая полость 28 золотника 8 связана через пусковой клапан 30 с насосом 31 и через подпорный клапан 32 со сливом 33. Дозирующее устройство 29 состоит из клапанов 34 - 36, дозаторов 37 и 38, устройства 39 подпитки. Дозаторы 37 и 38 имеют подвижные поршни 40 и 41, регулируемые упоры 42 и 43, объемные полости 44 и 45. I Полость 14 обоймы 12 гидравли1 ески связана с устройством 39 подпитки. Золотник 8 С1шбжен датчиком 46 контроля исходного положения. Связь полостей 25 и 26 датчика 7 обратной связи через распределитель 11с позйрующим устройством 29и с торцовой полостью 27 золотника 8 осуществляется с помощью линии 47 обратной связи. Управление модулем осуществляется программатором 48. Модуль промышленного робора работает следуюп.ц1м образом. При включешш пускового клапана 30 открывается доступ рабочей жидкости от насоса 31 к торцовой полости 28 золотника 8, который перемещается влево, открывая доступ рабочей жщцсости от иасоса 10 через реверсивный распределитель 9 к гидромотору 6, который перемещает штангу 1 влево. Одновременно от пасоса 31 рабочая жидкость поступает через распределитель 11 в полость 26 датчика 7 обратной связи. При этом линейное перемещение штанги 1 посредством рейки 3 и шестерни 5 передается на ротор 16 через приводной вал 13 и муфту 24, а через шестерни 19 передается вращение на ролики 17 и 18. Ротор 16, захватьшая рабочую жидкость в полости 26, перекачивает ее в полость 25, при зтом ролик 18, соприкасаясь с ротором 16, размыкает полости 25 и 26. Одновременно полость 14 обоймы 12, в которой размещена ролико-лопастная гидромашина 15 подпитывается от устройства 39 прстоя1шым давлением, равное которому
устанавливается в полостях 25 и 26, исключая тем самым утечки и перетечки рабочей жидкости.
Рабочая жидкость из полости 25 через распределитель 11 по линии 47 обратной связи вытесняется в дозирующее устройство 29; где при соответствующем включенном клапане, например 35, заполняет объемную по: ость 49 дозатора 37. При достижении поршнем 40 регулируемого упора 42 давление рабочей жидкости в цепи 47 обратной связи, а соответственно под торцом полости 27 золотника 8 поднимается и, преодолевая давление под торцом полости 28 золотника 8 перемещает последний вправо и перекрьтает обе полости гидромотора 6. Штанга 1 останавливается, осуществляя позиционное перемещение заданной величины. Датчик 46 золотника 8 дает команду программатору 48 на срабатьшание захвата (не показан), размещенного на штанге 1. Одновременно выключается пусковой клапан 30 и включается клапан 34, при зтом осуществляется опорожнение объемной полости 49 дозатора 37 в подпиточное устройство 39. После чего
программатор 48 дает команду на отработку другой величины позиционного перемеще1шя от другого дозатора 38.
Для перемещения щтанги 1 в обратном иаправлении переключается реверсивный распределитель 9 и вместе с ним распределитель II, который соединяет полость 26 датчика 7 обратной связи с линией 47 обратной связи, при этом переключение золотника 8 для запирания
гидромотора 6 осуществляется в том же режиме повышения давления в цепи 47 обратной связи, но из полости 26 датчика 7 обратной связи при вращении его в обратном направлении.
Таким образом, снабжение модуля герметичной обмоткой с постоянным давлением, размещение в обойме ролико-лопастной машины достигается постоянство объема датчика ббратной связи, обладающего жесткой расходной характеристикой, независящей от положения штанги и скорости ее перемещения, чем обеспечивается значительное повышение точности позиционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1979 |
|
SU873571A2 |
| ШАГОВЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ ДОЗИРОВАНИЕМ | 2018 |
|
RU2680633C1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| Система централизованной смазки | 1988 |
|
SU1645741A1 |
| Планетарно-роторный гидромотор Ерасова | 1988 |
|
SU1642050A1 |
| Модуль промышленного робота | 1978 |
|
SU730563A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| ПОГРУЖНОЙ ГИДРОУДАРНЫЙ МЕХАНИЗМ МОЛОТА ДЛЯ ПРОВЕДЕНИЯ ВЕРТИКАЛЬНОГО БУРЕНИЯ БУРОВЗРЫВНЫХ СКВАЖИН | 2019 |
|
RU2736685C1 |
| Планетарно-роторный гидромотор Ерасова | 1983 |
|
SU1280197A1 |
| ГИДРОМОТОР-КОЛЕСО | 2023 |
|
RU2825493C1 |
МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА, содержащий расположенную в направляющих штангу с силовым приводом, дозирующее устройство, основной распределитель, пусковой клапан и трубопроводы, отличающийся тем, что, с целью повыщения точности позиционирова1шя, он снабжен дополнительным распределителем, герметичной обоймой с валом и ролико-лопастной машиной, помещенной внутри указанной обоймы, при этом вал обоймы одним концом через дополнительно введенную ко шенсационную муфту, соединен с валом ролико-лопастной машины, а другим концом связан со штангой, кроме того, напорная и сливная полости ролико-лопастной машины через дополнительный распределитель подсоединены к основному распределителю и пусковому клапану, а полость герметичной обоймы связана с дознруюшим устройством. (О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Модуль промышленного робота | 1979 |
|
SU873571A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
