№
15
13
J7
4 N3
4
ЭО
ю
W
}7
ментов с любой стороны (сверху, сбоку, спереди, сзади)о Стереотаксичес- кий аппарат содержит съемный корпус 1, первую раму S с фиксаторами 9 для прикрепления. К иижией стороне рамы 2 жестко присоединена круговая направляющая 10 с размещенньоти на ней дуговыми кронштейнами И, имеющи ми возможность перемещения и фиксации. Корпус имеет вторую раму и план шет, держатель 5 с координатной решеткой 7 и держатель 6 с кассетами 8 и планкамНо На кронштейнах 11 с возможностью перемещения и фиксации
А2А827
установлены ползуны 12, на которых шарнирами 13, 14 укреплен направи- тель 13, в котором устанавливается медицинский инструмент 16, снабжен- н ый отсчетными делениями,, На раме 2 имеются подставки 17 для установки корпуса. К другой раме крепится круговая направлякядая, идентичная нап- равляклцей 10 с кронштейнами, аналогичньпчи кронштейнам 11, также с ползуном. Устройство содержит также координатно-механическзто систему, планшет для определения глубины залегания целевых точек. 4 ил„
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереотаксический аппарат | 1980 |
|
SU938982A1 |
| Устройство Каушлы К.М. для репозиции костных отломков | 1980 |
|
SU906546A1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ ЭКСПОЗИЦИОННАЯ ЛИНЕЙКА | 2003 |
|
RU2251973C2 |
| Компрессионно-дистракционный аппарат | 1980 |
|
SU895422A1 |
| Устройство для лечения переломо-вывихов шейных позвонков | 1983 |
|
SU1106497A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| Стереотаксический аппарат | 1980 |
|
SU955916A1 |
| Прибор для геодезической съёмки местности | 1937 |
|
SU62159A1 |
| Гониометр | 1985 |
|
SU1301379A1 |
| Чертежный прибор | 1990 |
|
SU1750978A1 |
Изобретение откосится к медицинской технике, касается устройств для определения координат точек внутри мозга или другого органа тела человека и введения в эти точки медицинских инструментов (электродов) во время операции. Предназначено для нейрохирургии, травматологии, онкологии. Цель изобретения - повышение точности локализации при использовании Нескольких медицинских инстру
1
Изобретение относится к медицинской технике, в частности к устройствам для определения коо адинат точек, расположенных внутри мозга или дру- гого органа тела человека, и введения в эти точки во время операции медицинских инструментов (электродов и может быть использовано в нейрохирургии, а также в травматологии и онкологии.
Целью изобретения является повышение точности локализации при использовании нескольких медицинских инструментов сверху, , спереди и сзади
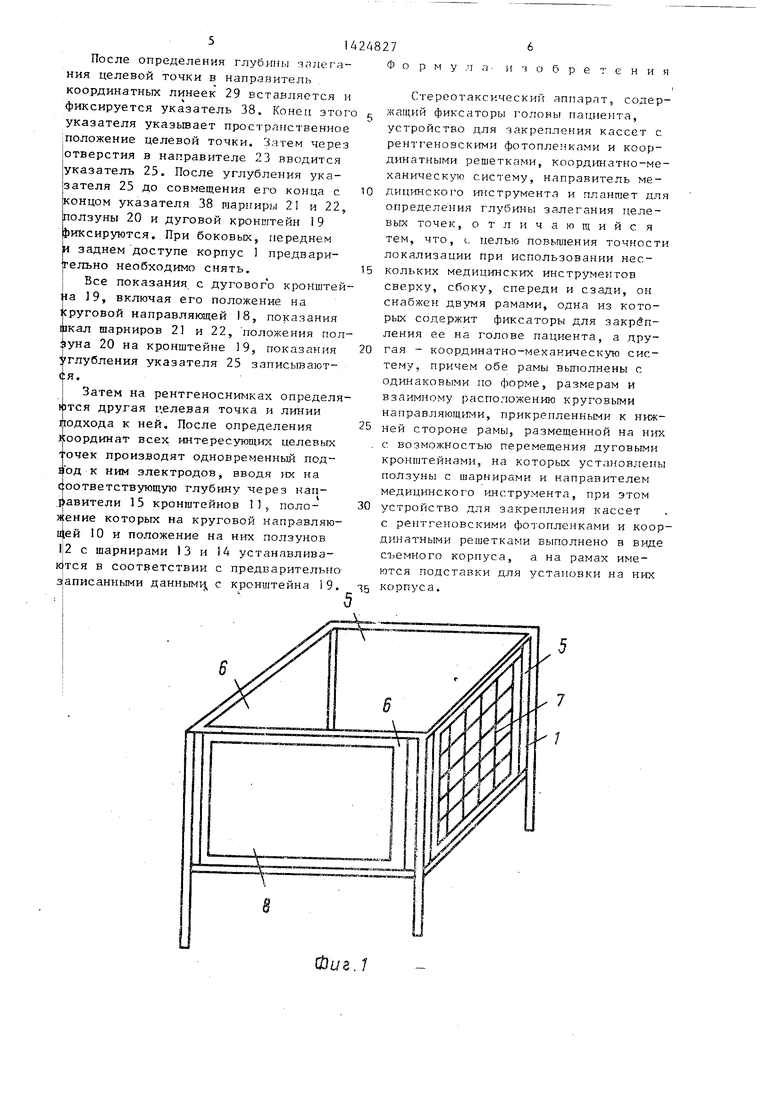
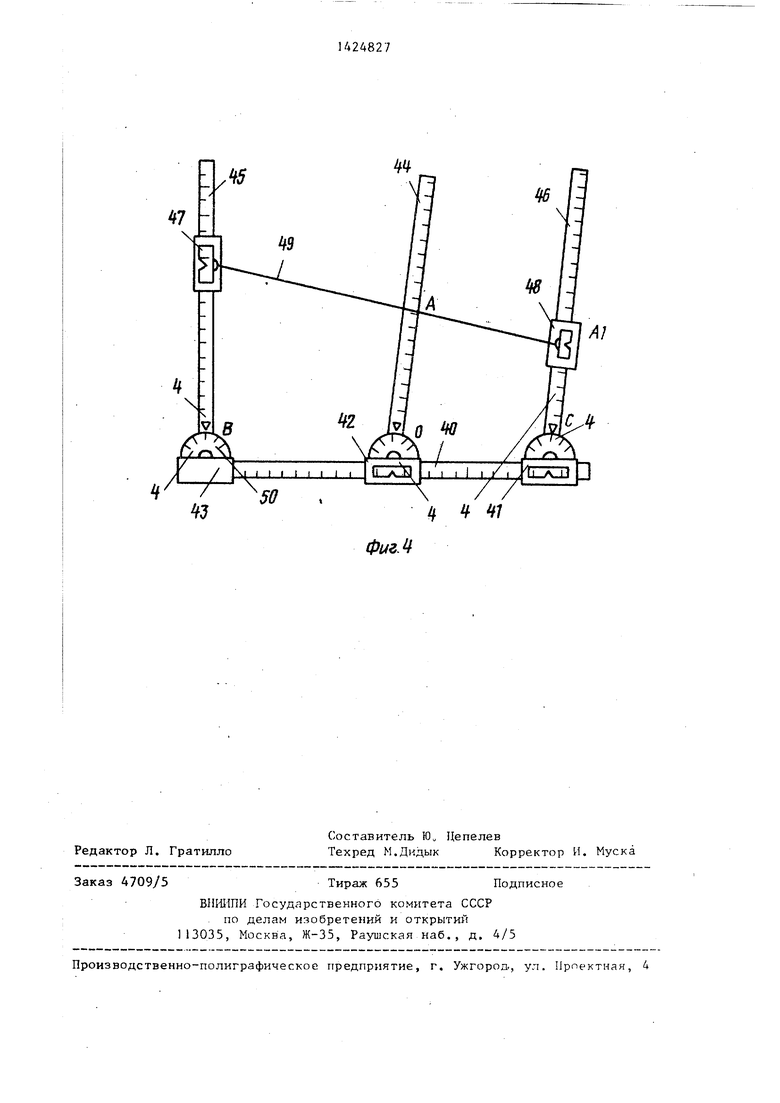
На фиг„ 1 изображен корпус аппа-. |рата, общий вид; на фиг 2 - первая |рама с установленным на ней корпусом общий вид; на фиг. 3 - вторая рама также с установленным на ней корпусом, общий ввд; на фиг. 4 - планшет, общий вид.
Аппарат содержит четыре обособлен иые части: корпус 1 (фиг.1), первую раму 2 (фиг. 2), вторую раму 3 (фиг.З) и планшет 4 (фиг 4).
На корпусе 1 (фиг.) жестко закрелены держатели 5 и 6. На держателях 5 установлены координатные решетки 7, а на держателях 6 при рентгеносъемке закрепляются кассеты 8 с план ИамИо
Первая рама (фиГо2) снабжена фик- саторами 9 для крепления ее на голове пациента К нижней стороне рамы 2
0
0
0
жестко присоединена круговая направляющая 10, на которой размещены с возможностью перемещения и фиксации дуговые кронштейны 11.
На кронштейнах 11 с возможностью перемещения и фиксации установлены ползуны 12, на которых посредством двух шарниров 13 и 14 укреплен нап- равитель 15о
Шарниры 13 и 14, как и ползуны 12, выполнены регулируемыми с возможностью фиксации в любом положении. Круговая направляющая 10, кронштейны 11 снабжены отсчетными делениями, а шарниры 13 и 14 - отсчетными шкалами. В направителе 15 с возможностью фиксации устанавливается медицинский инструмент 16 (например, электрод или канюля), также снабженный отсчетными делениями. На раме 2 имеются четыре подставки 7, на которые может устанавливаться корпус ол
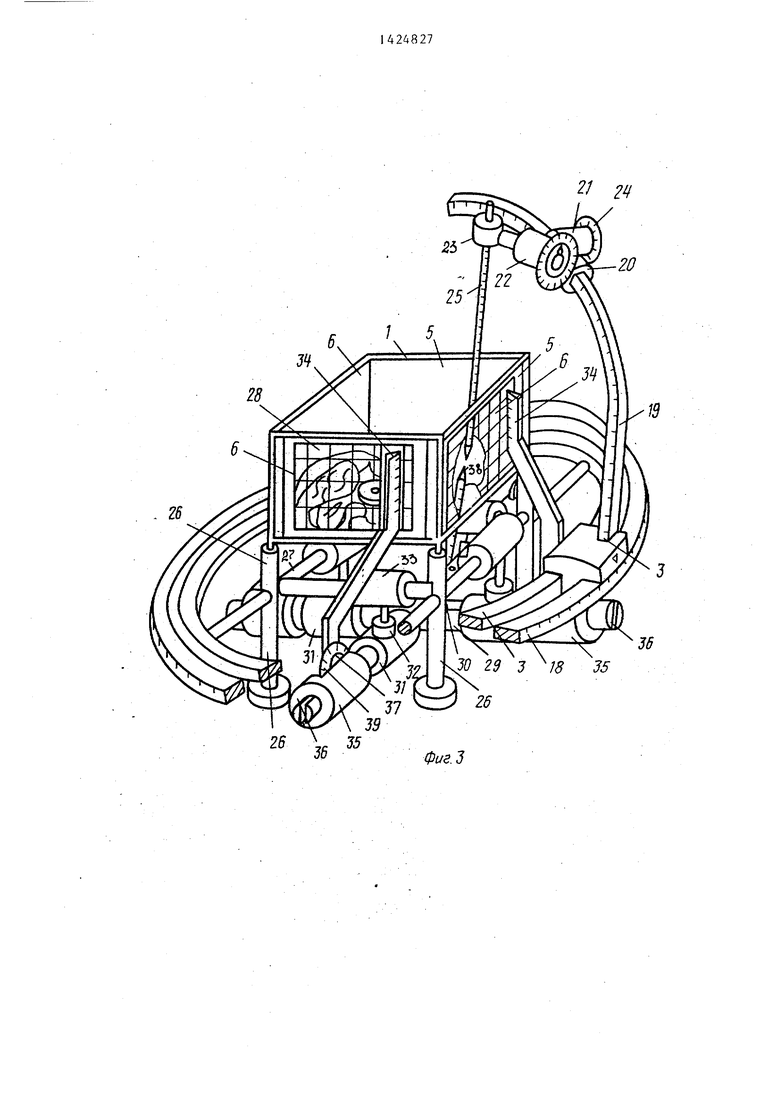
Рама 3 (фиг.З) по форме, размерам и взаимному расположению однородных частей идентична раме 2 (фиг.2). К нижней стороне рамы 3 в точном соответствии с положением относительно рамы 2 круговой направляющей 10 крепится круговая направляющая 18, идентичная по форме и размерам направляющей 10. По направляющей 18 с возможностью перемещения и фиксации закреплены дуговые кронштейны 19, идентичные дуговым кронштейнам 11.
На кронштейне 19 (фиг„3) с возможностью перемещения и фиксации установлен ползун 20, на котором посредством шарниров 21 и 22 укреплен направитель 23 Форма, размеры и взаимное расположение ползуна 20, шарниров 21 и 22 и направителя 23 рамы 3 идентичны форме, размерам и взаимному расположению ползунов 12, шарниров J3 и 1А и налраввтелей 15 рамы 2. Соответствующие отсчетные деления и шкалы обеих рам также идентичны. Шарниры 21 и 22 снабжены, отсчетными шкалами 24. В направи- теле 23 с возможностью фиксации устанавливается указатель 25, идентичный по форме и размерам электроду 16, Рама 3 снабжена ножками 26.
По периметру рамы 3 (фиг.З) жестко установлены направляющие 27, на которых закреплена координатно-меха- ническая система, используемая для снятия графической информации с рентгенограмм 28. Координатно-механичес- кая система состоит из двух координатных линеек 29 со сквозными пазами 30, соединенных через горизонтальные шарниры 31 и вертикальные шарниры 32 с ползунами 33, перемещающимися по направляющим 27.
На концах координатных линеек 29 (фиг.З не показаны) жестко в радикальном и свободно в продольном направлениях закреплены визирные линейки 34, установленные в плоскости паза 30, Жесткость в радиальном и свобода в продольном направлениях линеек обеспечивается ползунами 35, штиф- /.о раме 12. Рентгеноснимки устанавлива- ты которых перемещаются в пазу 36 координатных линеек 29, К ползунам . визирные линейки 34 присоединены пос- редством горизонтального шарнира 37, что обеспечивает плотное поджатие 45 визирных линеек 34 к плоскости рент- генос.нимков 28 и координатных решеток 7. В продольных пазах 30 координатных линеек 29 расположен направи- При этом координатные линейки 29 тель, через отверстие которого с воз- Q получают такую пространственную и
ют на держателях 6 в том же положении, в каком на них находились кассеты с пленками. После зтого визирные линейки 34 совмещают с проекциями линий подхода к целевой точке на координатных решетках 7 и реитгено- снимкаХо
можностью фиксации устанавливается указатель 38. Визирные линейки 34 и указатель 38 снабжены отсчетными делениями, шарниры 37 - отсчетными шкалами 39.
Планшет 4 (фиг,4) является плоским, сн состоит из направляющей 40 и установленных на ней двух ползунов 41 и 42, Планка 43 закреплена на наугловую ориентацию, при которой их направитель ориентируется на целевую точку. Все шарниры и ползуны коор- динатно-механической системы после eg этого фиксируют. Данные, снятые с координатной линейки 29, визирных линеек 34, шкалы угломерного устройства и шкалы 39, переносятся на планшет 4 (фиГо4).
1C
15
24827
правляющей 40 жестко. Ползун 42 шарнирно соед1-шен с линейками 44, а планка 43 и ползун 41 гаарнирно соединены с направляющими 45 и 46, На направляющих 45 и 46 установлены с возможностью продольного переметения ползуны 47 и 48, соединенные между собой упругой нитью 49 Направляющие 40, 45 и 46 и линейка 44 снабжены отсчетными делениями, а ,,ар-. ниры направляющих 45 и 46 и линейки 44 - отсчетн тми шкалами 50„
Работа со стереотакс1иеским аппаратом производится следующим обраЗОМо
Перед проведением операции на головном мозге рама 2 жестко закрепляется на голове больгого посредством фиксаторов 9. На раму 2 устанавливается и фиксируется корпус 1 (фиг.2. На держателях 5 жестко закрепляются рентгенокассеты 8 с фотопленками.. Со стороны держателей 5 с жестко закрепленными на ник координатными решетками 7 производят рентгеносьемку После получения рент- геноснимков на них определяют и отмечают целевые точки (хирургические мишени) и линии подхода к ним. Целевые точки и линии подхода к ним переносят с рентгеноснимков на соответствующие координатные решетки 7. . При этом линии проводятся через те же координатные точки.
20
25
30
35
Затем корпус I снимают с рамы 2 и устанавливают на раму 3 в том же. положении, в каком он находился на
раме 12. Рентгеноснимки устанавлива- При этом координатные линейки 29 получают такую пространственную и
ют на держателях 6 в том же положении, в каком на них находились кассеты с пленками. После зтого визирные линейки 34 совмещают с проекциями линий подхода к целевой точке на координатных решетках 7 и реитгено- снимкаХо
угловую ориентацию, при которой их направитель ориентируется на целевую точку. Все шарниры и ползуны коор- динатно-механической системы после этого фиксируют. Данные, снятые с координатной линейки 29, визирных линеек 34, шкалы угломерного устройства и шкалы 39, переносятся на планшет 4 (фиГо4).
После определения глубины залегания целевой точки в направитель координатных линеек 29 вставляется и фиксируется ука затель 38. Конец этог указателя указьгоает лростраиственное положение целевой точки. Затем через отверстия в направителе 23 вводится указатель 25. После углубления указателя 25 до совмещения его конца с концом указателя 38 шарниры 21 и 22, ползуны 20 и дуговой кронштейн 19 1)иксируются, При боковых, переднем и заднем доступе корпус 1 предварительно необходимо снять.
Все показания с дуговогЪ кронштейна 19, включая его положение на )сруговой направляющей 18, показания икал шарниров 21 и 22, положения пол 20 на кронштейне 19, показания углубления указателя 25 записываются.
Затем на рентгеноснимках определя- 1)тся другая 1,елевая точка и линии подхода к ней. После определения лоординат всех интересующих целевых точек производят одновременный под- и од к ним электродов, вводя их на соответствующую глубину через нап- равители 15 кронштейнов П, поло- я:ение которых на круговой направляю- Цей ID и положение на них ползунов 1|2 с шарнирами 13 и 14 устанавлива- 14тся в соответствии с предварительно з|аписанными данным с кронштейна 19.
о р м у л л - и
Р е
е и и я
Стереотаксический аппарат, содержащий фиксаторы головы пациента, устройство для закрепления кассет с peHTreHOBCKtrMH фотопленками и координатными решетками, коордииатно-ме- ханическую систему, направитель медицинского инструмента и планшет для определения глубины залегания целе- вьк точек, о т л и ч а ю га; и и с я тем, что, t. целью повышения точности локализации при использовании нескольких медицинских инструментов сверху, сбоку, спереди и сзади, он снабжен двумя рамами, одна из которых содержит фиксаторы для закрепления ее на голове пациента, а другая - координатно-механическую систему, причем обе рамь; вьтолнены с одинаковыми по форме, размерам и взаимному расположению круговыми направляющими, прикрепленными к нижней стороне рамы, размещенной на них с возможностью перемещения дуговыми крон итейнами5 на которых установлены ползуны с шарнирами и направителем медицинского инструмента, при этом
устройство для закрепления кассет
с рентгеновскими фотопленками и координатными решетками выполнено в виде съемного корпуса, а на рамах имеются подставки для установки на них
корпуса.
28
26
21 24
20
30 29 3 V 35
36
26
Фиг. J
47
4
i 1
фигЛ
| Кратина Ю.Г., Гусельникова В.Ис Техника и методика электроэнцефалографии | |||
| М.: Наука, 1971 | |||
| Авторское свидетельство СССР № 777899, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
