1
Изобретение относится к грузозахватным устройствам, в частности к захватам для листовых материалов.
Известен захват для листовых материалов, содержащий навешиваемый на грузоподъемное устройство корпус с полостью, в которой расположены шарнирно закрепленная на оси направляющая, взаимодействующий с ней подпружиненный несамотормозящийся клин, и двуплечий прижимной рычаг, и расположенный в нижней части захвата прижимной винт 1.
Однако известный захват недостаточно надежен в работе, так как в момент касания листом опорной плоскости при опускании, подъемуое усилие, приложенное к несамотормозящему подпружиненному клину исчезает и клин опускается, в результате чего достигнутое усилие самозажима также исчезает и происходит выскальзывание листа из захвата.
Цель изобретения - повышение надежности в работе.
Поставленная цель достигается тем, что захват для листовых материалов снабжен дополнительным самотормозящимся клином, расположенным между верхним плечом
прижимного рычага и подпружиненным клином, причем оба клина установлены с возможностью взаимного перемещения и снабжены элементом фиксации, и в обоих клиньях, а также в направляющей выполнена 5. полость, внутри которой на прикрепленной к подпружиненному клину оси установлен блок, огибаемый канатом, навешиваемым на грузоподъемное устройство, петля которого охватывает ось направляющей.
Такое выполнение захвата повыщает на10дежность его в работе, так как позволяет сохранить в захвате достигнутое усилие самозажима при снятой нагрузке с ветвей троса, и снять заклиненный захват с зажатой пачки листов независимо от ее веса.
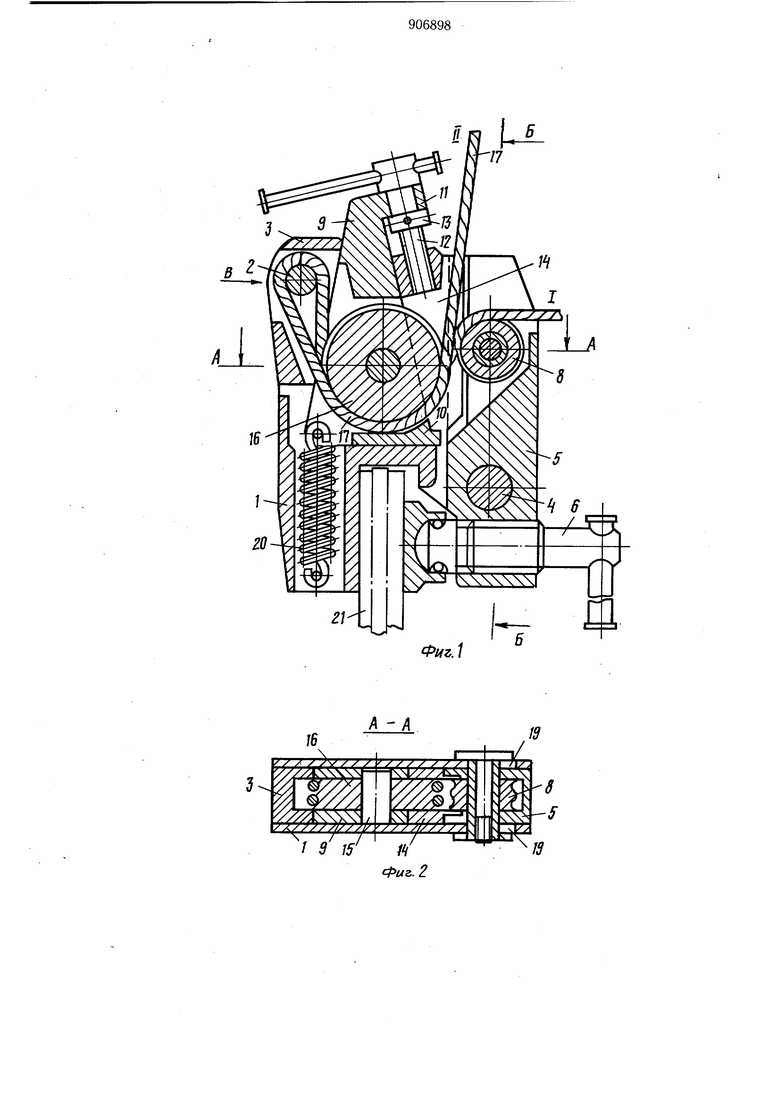
На фиг. I представлен захват для листо15вых материалов, общий вид, в разрезе; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на.фиг. 4 - вид В на фиг. 1.
Захват для листовых материалов содер20жит корпус 1, в полости которого на оси 2 установлена направляющая 3 и на оси 4 двуплечий прижимной рычаг 5. В нижнем плече рычага установлен прижимной винт 6 с плоской пятой и рукояткой. В полость
верхнего плеча прижимного рычага 5 на оси 7 установлен отклоняющий ролик 8 с двумя ручьями. Между направляющей 3 и прижимным рычагом 5 расположен подпружиненный несамотормозящийся клин 9 с выступом 10.
В отверстие выступа 11 установлен галтелью фиксирующий винт 12 с рукояткой и кольцом 13 без возможности пееремещения вдоль оси. Между выступом 10 и кольцом 13 установлен дополнительный самотормозящийся клин 14, передвигающийся относительно клина 9 фиксирующим винтом 12, который является элементом фиксации обоих клиньев. Клинья 9 и 14 образуют составной самотормозящийся клин. В полость обоих клиньев на оси 15, закрепленной на подпружиненном клине 9, введен блок 16 с двумя ручьями. Петля каната 17 охватывает ось 2. В направляющей 3 выполнен фигурный паз18, отклоняющий ветви каната по ручьям блока. Ветви каната взаимоде|1ствуют и с ручьями введенного отклоняющего ролика 8. Концы оси 7 выведены через пазы 19 наружу корпуса. Пазы ограничивают отклонение прижимного рычага 5. Ветви каната 17 соединены с грузоподъемным устройством. Пружина 20 возврата клиньев установлена в полости клещни корпуса 1.
Устройство работает следующим образом.
Захват одевают на пачку плоских листов 21, находящуюся в горизонтальном или вертикальном положении и поджимают прижимным винтом 6. При этом верхнее плечо прижимного рычага 5 через дополнительный клин 14 прижимает подпружиненный клик. 9 к направляющей 3. При подъеме захвата за ветви каната 17 от I до II направления, канат воздействует на блок 16. Последний толкает составной клин 9 и 14, между направляющей 3 и прижимным рычагом 5, отклоняя его верхнее плечо. Нижнее плечо прижимного рычага 5 дополнительно прижимает винт 6 пятой к листу, создавая самозажим пачки.
При снятой нагрузке с ветвей каната 17 составной клин 9 и 14 остается выдвинутым
И заторможенным, сохраняя в захвате достигнутое усилие самозажима пачки. Для снятия заклиненного захвата с зажатой пачки листов необходимо, в зависимости от ее веса, отвернуть прижимной винт 6 или фиксирующим винтом 12 опустить подпружиненный клин 9 относительно направляющей 3 и дополнительного клина 14. Затем снять захват и опустить снова фиксирующим винтом 12 дополнительный клин 14 в исходное положение, показанное на фиг. 1. Для переноса пачки плоских листовых материалов в вертикальном положении используется не менее двух захватов.
Предлагаемая конструкция устройства более надежна в работе по сравнению с известными.
Формула изобретения
Захват для листовых материалов, содержащий навещиваемый на грузоподъемное устройство корпус с полостью, в которой расположены шарнирно закрепленная на оси направляющая, взаимодействующий с ней подпружиненный несамотормозящийся клин, и двуплечий прижимной рычаг, и расположенный в нижней части захвата прижимной винт, отличающийся тем, что, с целью повыщения надежности в работе, он снабжен дополнительным самотормозящимся клином, расположенным между верхним плечом прижимного рычага и подпружиненным клином, причем оба клина установлены с возможностью взаимного перемещения и снабжены элементом фиксации и в обоих клиньях, а также в направляющей выполнена полость, внутри которой на прикрепленной к подпружиненному клину оси установлен блок, огибаемый канатом, навещиваемое на грузоподъемное устройство, петля которого охватывает ось направляющей.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 594011, кл. В 66 С 1/44, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для листовых изделий | 1987 |
|
SU1557057A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Трелевочная каретка подвесной канатной дороги | 1987 |
|
SU1418130A1 |
| Устройство для отделения листового материала от стопы | 1986 |
|
SU1341133A1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092656C1 |
| ЗАХВАТ ДЛЯ ЛИСТОВОГО МАТЕРИАЛА | 1969 |
|
SU256196A1 |
| Захват-кантователь для грузов | 1976 |
|
SU734123A1 |
| Захватно-разделительное устройство | 1973 |
|
SU546553A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Устройство для формирования и упаковки пачек бумаг в рукавный термосклеивающийся материал | 1984 |
|
SU1191361A1 |

Л -К
вид В
19
