ff J f
U2.f / f / 2
Изобретение относится к грузоподъемным устройствам, в частности к автоматическим захватам для труб.
Известно грузозахватное устройство для труб, содержащее траверсу с направляющими балками, нодвижные вдоль балок приводные тележки С захватными крюками и посадочными упорами, выполненными в виде балок, снабженных набором приводных поворотных фигурных лопастей, центрирующих траверсу относительно поднимаемых труб, а захватные крюки щарнирно закреплены на приводных тележках 1.
Однако данное устройство довольно сложно в конструктивном OTHOuieHHH из-за индивидуального винтового привода перемещения каждой тележки, длина винтов которого зависит от хода тележки, а также необходимости токоподвода к каждой тележке в виду наличия в ней конечных выключателей.
Кроме того, конструкция захвата не обеспечивает загрузки нижнего яруса полувагонов, так как сам захват длиннее укладываемой трубы. В этом случае требуется дополнительное оборудование и обслуживающий его персонал для загрузки нижнего яруса. Требуется также предварительное центрирование захвата относительно трубы, что снижает эффективность его работы.
Известно захватное устройство для длинномерных грузов, содержащее навещиваемую на крюк грузоподъемного механизма траверсу- с направляющими, на которых установлены с возможностью перемещения от привода каретки,каждая из которых включает в себя корпус с упорами, щарнирно закрепленные на нем рычаги, связанные одними своими плечами между собой с помощью упругого элемента, а другими - с роликами, установленными с возможностью взаимодействия с направляющими траверсы и захватные лапы 2.
Недостатками известного захвата являются невозможность обеспечения загрузки нижнего яруса полувагона, обусловленная длиной направляющих, а также обязательное предварительное центрирование его, так как в противном ,случае возможно падение груза.
Цель изобретения - повыщение надежности работы устройства и удобства в эксплуатации.
Поставленная цель достигается тем, что захватное устройство, содержащее навещиваемую на крюк грузоподъемного механизма траверсу с направляющими, на которых установлены с возможностью перемещения от привода каретки, каждая из которых включает в себя корпус с опорами, щарнирно закрепленными на нем рычаги, связанные одними своими плечами между собой с помощью упругого элемента, а другими - с роликами, установленными с возможностью взаимодействия с направляющими траверсы, и захватные лапы, снабжено дополнительными каретками, закрепленными над первь ми направляющими дополнительными направляющими для этих кареток, и жестко прикрепленными к дополнительным кареткам балками, щарнирно соединенными с первыми каретками посредством осей, расположенных перпендикулярно направля,ющим, причем захватные лапы смонтированы на балках с возможностью поворота вокруг горизонтальной оси.
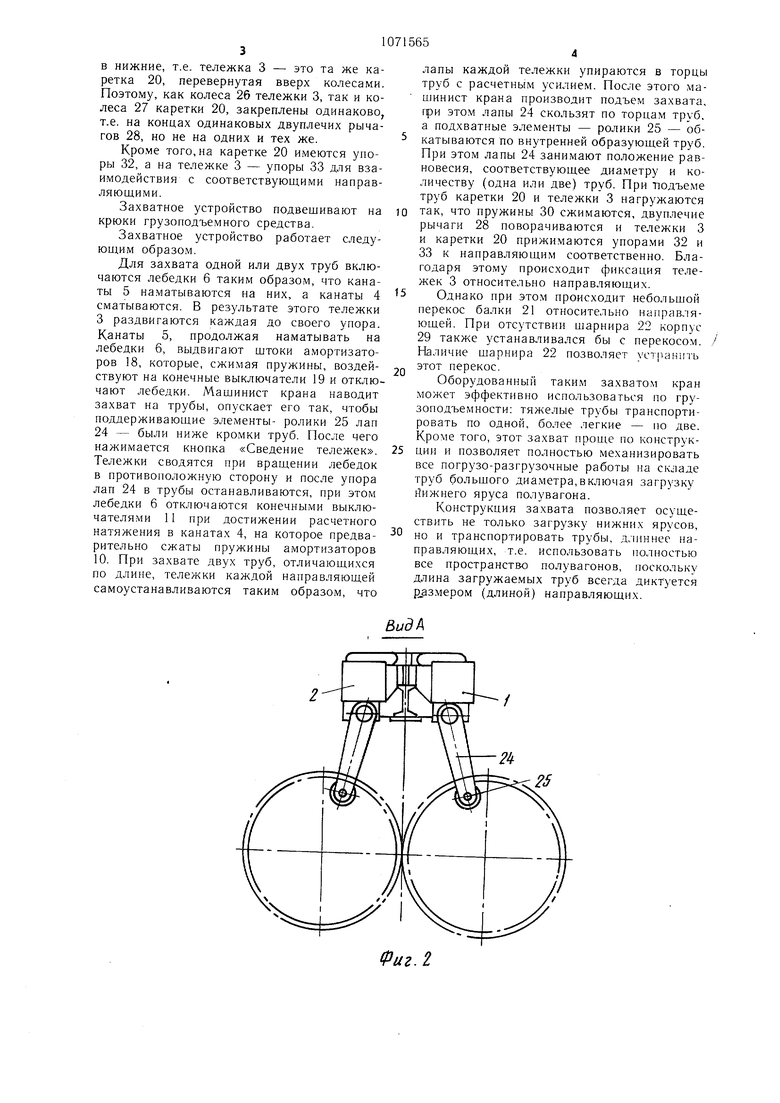
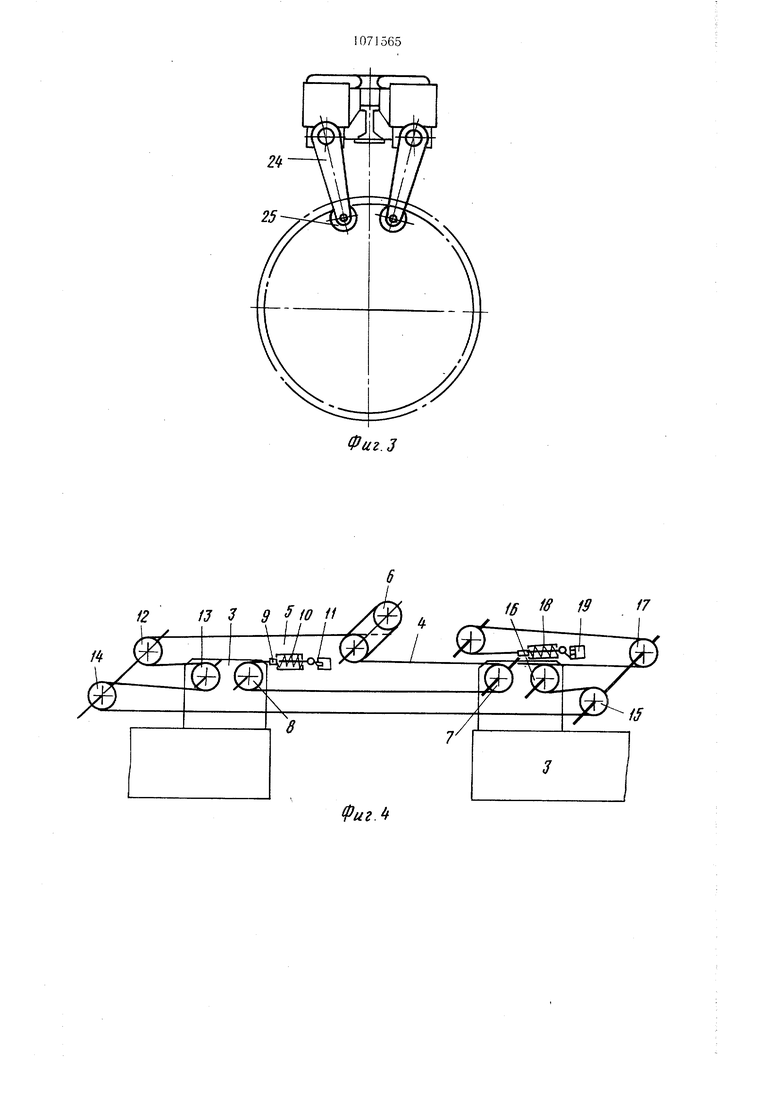
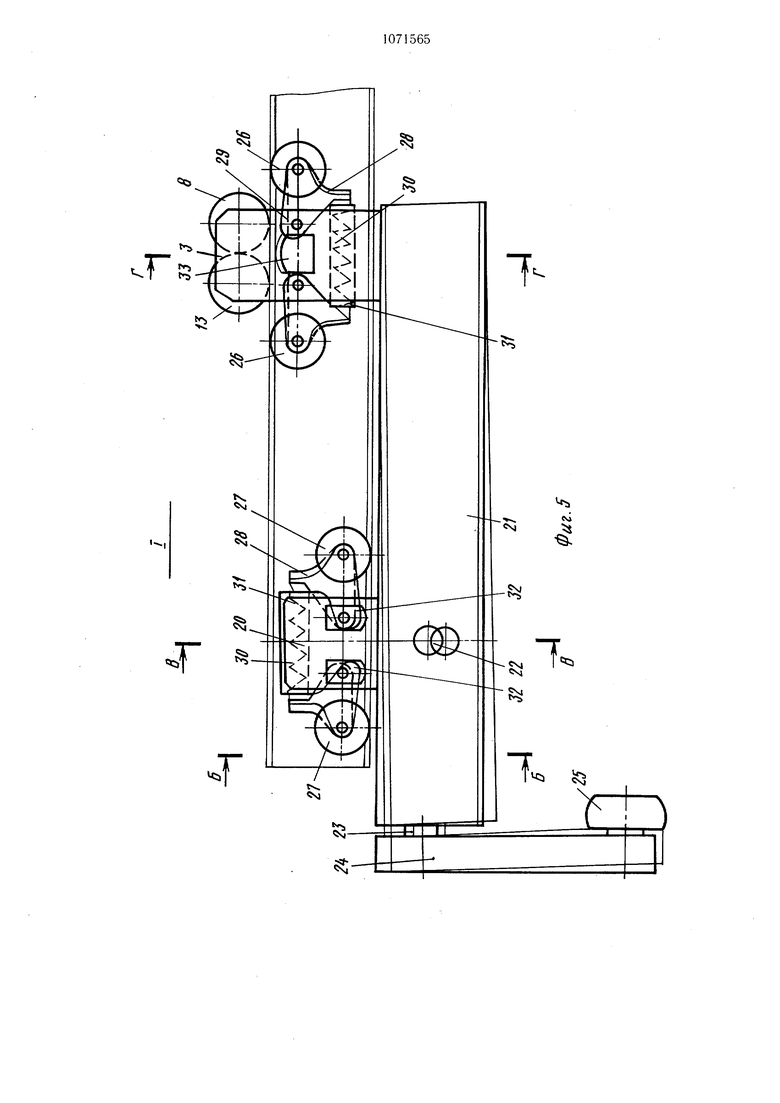
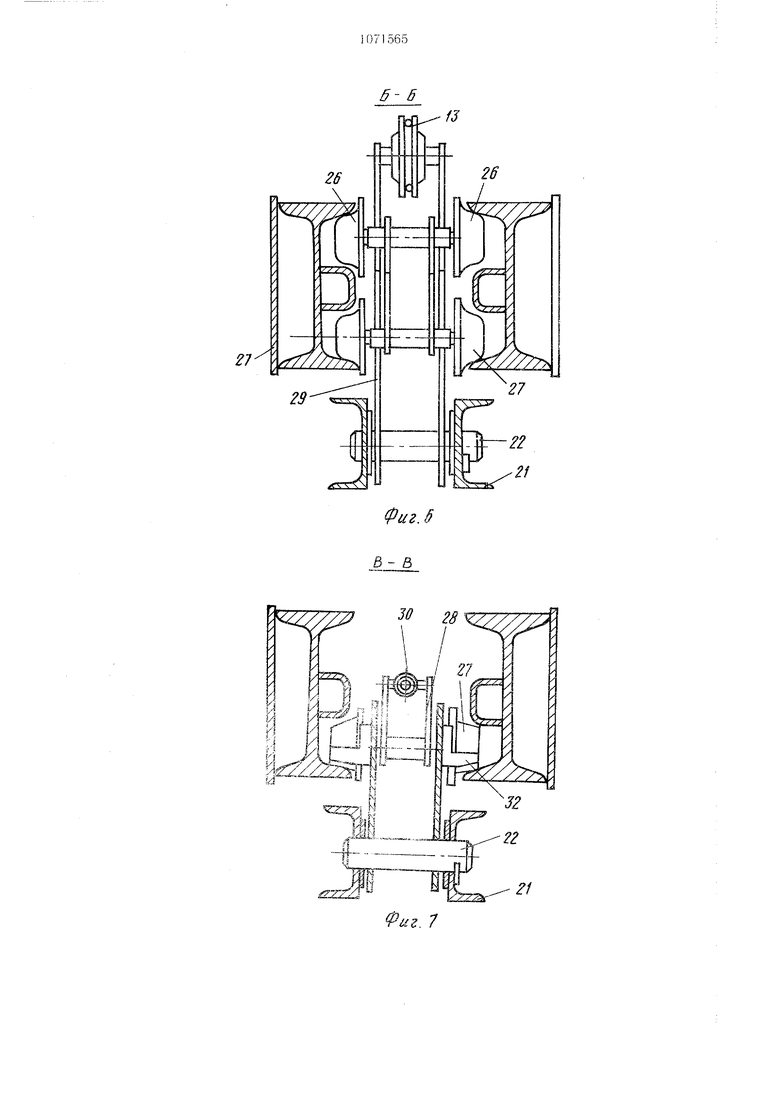
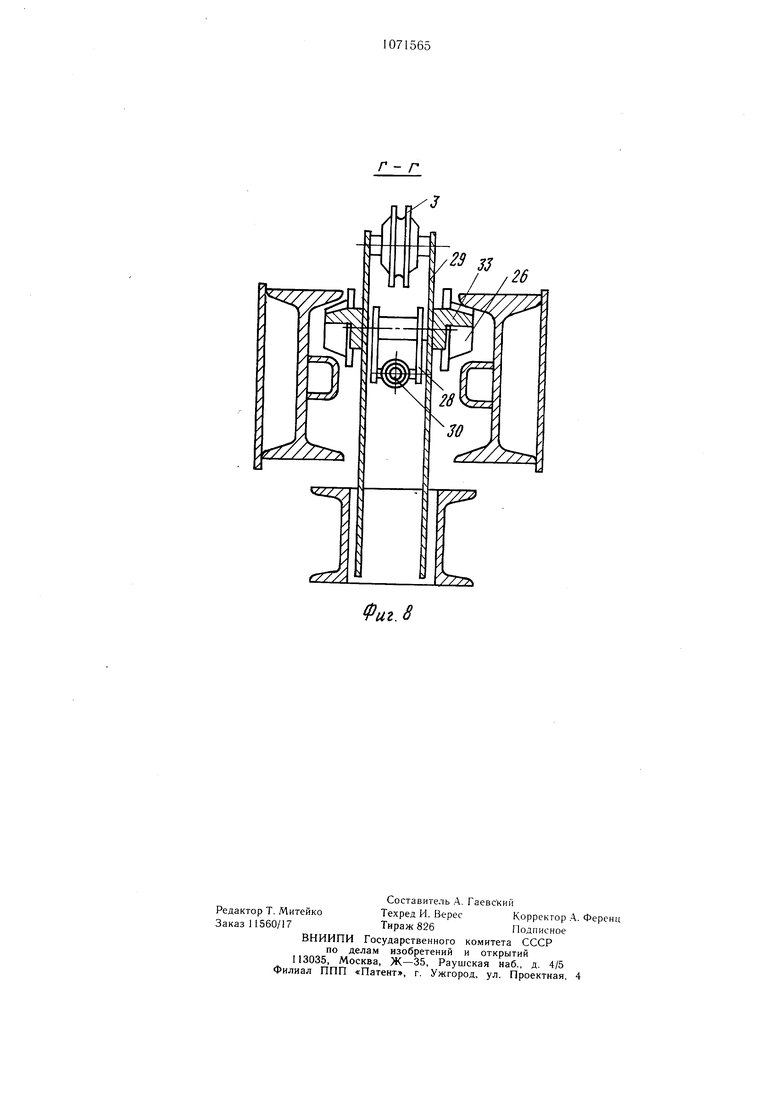
На фиг. 1 изображен автоматический захват, обилий вид; на фиг. 2 - вид А на фиг. 1 (подъем 2 труб); на фиг. 3 - то же, подъем одной трубы; на фиг. 4 - кинематическая схема привода тележек; на фиг. 5 - узел I на фиг. 1; на фиг. б - разрез Б-Б на фиг. 5; на фиг. 7 - разрез В-В на фиг. 5; на фиг. 8 - разрез Г-Г на фиг. 5.
Захватное устройство содержит траверсу, выполненную в виде соединенных .между собой направляющих 1 и 2. По каждой направляющей перемещаются две тележки 3, приводимые в движение канатами 4 и 5, наматываемыми и сматываемы.ми с лебе док 6. На каждой направляющей установлено по одной лебедке 6. Канат 4, сойдя с лебедки 6, огибает блоки 7 и 8 тележек 3 и крепится свободным концом к щтоку 9 амортизатора 10, смонтированного на наQ правляющей. Шток 9 амортизатора 10 взаимодействует с конечным выключателем И. Канат 5 сходит с лебедки 6 и огибает неподвижный блок 12, блок 13 тележки 3, неподвижные блоки 14 и 15, блок 16 другой тележки 3, неподвижный блок 17 и кре5 пится свободным концом к щтоку амортизатора 18, воздействующего на конечный выключатель 19. На направляющих 1 и 2 траверсы размещены каретки 20, каждая из которых соединена с соответствующей тележкой 3 балками 21.
Каждая балка 21 прикреплена одним концом к тележке 3 жестко., с кареткой 20 - щарнирно с помощью оси 22. На другом конце балки 21 поворотно на оси 23 смонтирована лапа 24 с подхватным элементом 25, выполненным в виде ролика. Тележка 3 на колесах 26 перемещается в верхней части направляющей, каретка 20 - на колесах 27 в нижней части направляющих. Колеса 26 тележки 3 и колеса 27 каретки 20 закреплены на одним концах дву0 плечих рычагов 28, щарнирно закрепленных на оси 29,другие концы этих рычагов связаны между собой предварительно сжатыми пружинами 30, заключенны.ми в стаканах 31.
Тележка 3 и каретка 20 имеют принципиально одинаковую конструкцию. Отличие их состоит лишь в том, что колеса тележки 3 перемещаются, упираясь в верхние полки направляющих, а колеса каретки 20 - в нижние, т.е. тележка 3 - это та же каретка 20, перевернутая вверх колесами. Поэтому, как колеса 26 тележки 3, так и колеса 27 каретки 20, закреплены одинаково, т.е. на конца.х одинаковых двуплечих рычагов 28, но не на одних и тех же. Кроме того, на каретке 20 и.меются уиоры 32, а на тележке 3 - упоры 33 для взаимодействия с соответствующими направляющими. Захватное устройство подвещивают на крюки грузоподъемного средства. Захватное устройство работает следующим образом. Для захвата одной или двух труб включаются лебедки 6 таким образом, что канаты 5 наматываются на них, а канаты 4 сматываются. В результате этого тележки 3 раздвигаются каждая до своего упора. Канаты 5, продолжая наматывать на лебедки 6, выдвигают щтоки амортизаторов 18, которые, сжимая пружины, воздействуют на конечные выключатели 19 и отключают лебедки. Машинист крана наводит захват на трубы, опускает его так, чтобы поддерживающие элементы- ролики 25 лап 24 - были ниже кромки труб. После чего нажимается кнопка «Сведение тележек. Тележки сводятся при вращении лебедок в противоположную сторону и после упора лап 24 в трубы останавливаются, при этом лебедки 6 отключаются конечными выключателями 11 при достижении расчетного натяжения в канатах 4, на которое предварительно сжаты пружины амортизаторов 10. При захвате двух труб, отличающихся по длине, тележки каждой направляющей самоустанавливаются таким образо.м, что лапы каждой тележки упираются Б торцы труб с расчетным усилием. После этого машинист крана производит подъем захвата, гри этом лапы 24 скользят по торцам труб, а подхватные элементы - ролики 25 - обкатываются по внутренней образующей труб. При этом лапы 24 занимают положение равновесия, соответствующее диаметру и количеству (одна или две) труб. При подъеме труб каретки 20 и тележки 3 нагружаются так, что пружины 30 сжимаются, двуплечие рычаги 28 поворачиваются и тележки 3 и каретки 20 прижимаются упорами 32 и 33 к направляющим соответственно. Благодаря это.му происходит фиксация тележек 3 относительно направляющи.х. Однако при этом происходит небольшой перекос балки 21 относительно направляющей. При отсутствии шарнира 22 корпус 29 также устанавливался бы с перекосом. Наличие шарнира 22 позволяет устранить этот перекос. Оборудованный таким захватом кран может эффективно использоваться по грузоподъемности: тяжелые трубы транспортировать по одной, более легкие - по две. Кроме того, этот захват проще по конструкции и позволяет полностью механизировать все погрузо-разгрузочные работы на складе труб больщого диаметра,включая загрузку йижнего яруса полувагона. Конструкция захвата позволяет осуществить не только загрузку нижних ярусов, но и транспортировать трубы, длиннее направляющих, т.е. использовать полностью все пространство полувагонов, поскольку длина загружаемых труб всегда диктуется .мером (длиной) направляющих.
4
25
Фиг.З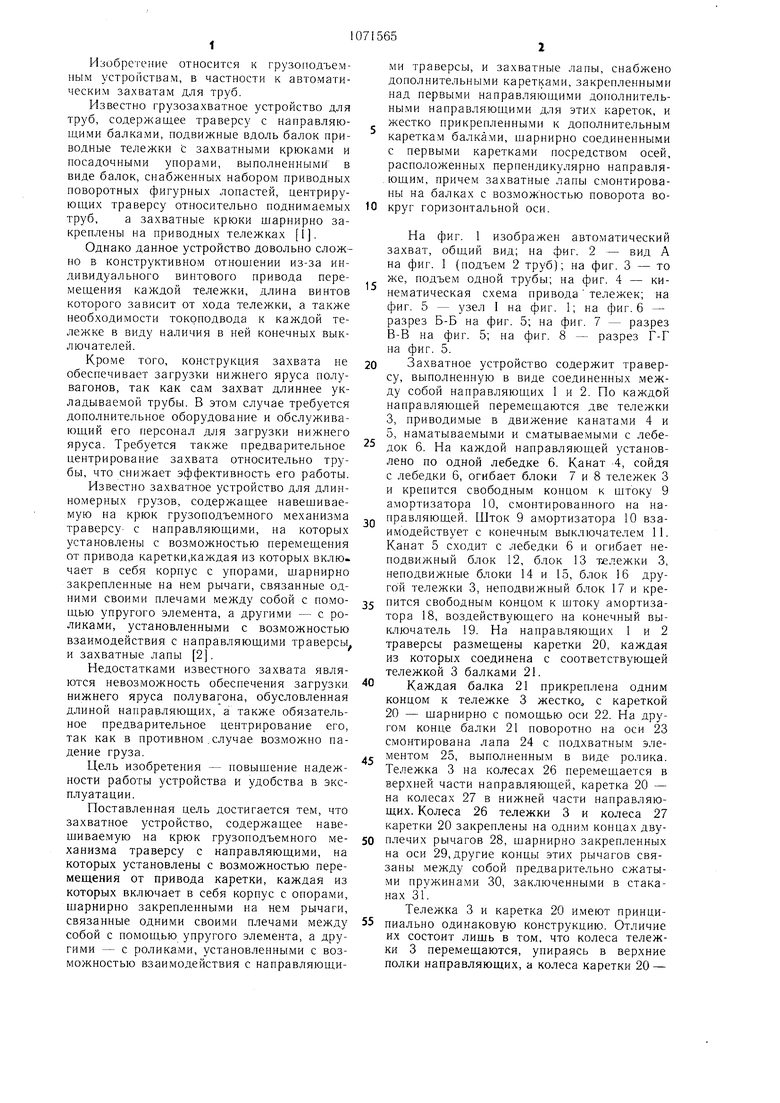
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для длинномерных грузов | 1982 |
|
SU1094833A2 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| Кран мостового типа | 1980 |
|
SU893825A2 |
| Захватное устройство для труб | 1982 |
|
SU1065326A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРУБ | 1972 |
|
SU334160A1 |
| Захватное устройство для труб | 1989 |
|
SU1740302A1 |
ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ, преимущественно труб, содержащее навещиваемую на крюк грузоподъемного механизма траверсу с направляющими, на которых установлены с возможностью перемещения от привода каретки, каждая из которых включает в себя корпус с упорами, шарнирно закрепленные на нем рычаги, связанные одними своими плечами между собой с помощью упругого элемента, а другими - с роликами, установленными с возможностью взаимодействия с направляющими траверсы, и захватные лапы, отличающееся тем, что,с целью повышения надежности и удобства в эксплуатации, оно снабжено дополнительными каретками, закрепленными над первыми направляющими дополнительными направляющими для этих кареток, и жестко прикрепленными к дополнительным кареткам, балками, щаркирно соединенными с первыми каретками посредством осей, расположенных перпендикулярно направляющим, причем захватные лапы смонтированы на балках с возможностью поворота вокруг горизонтальной оси.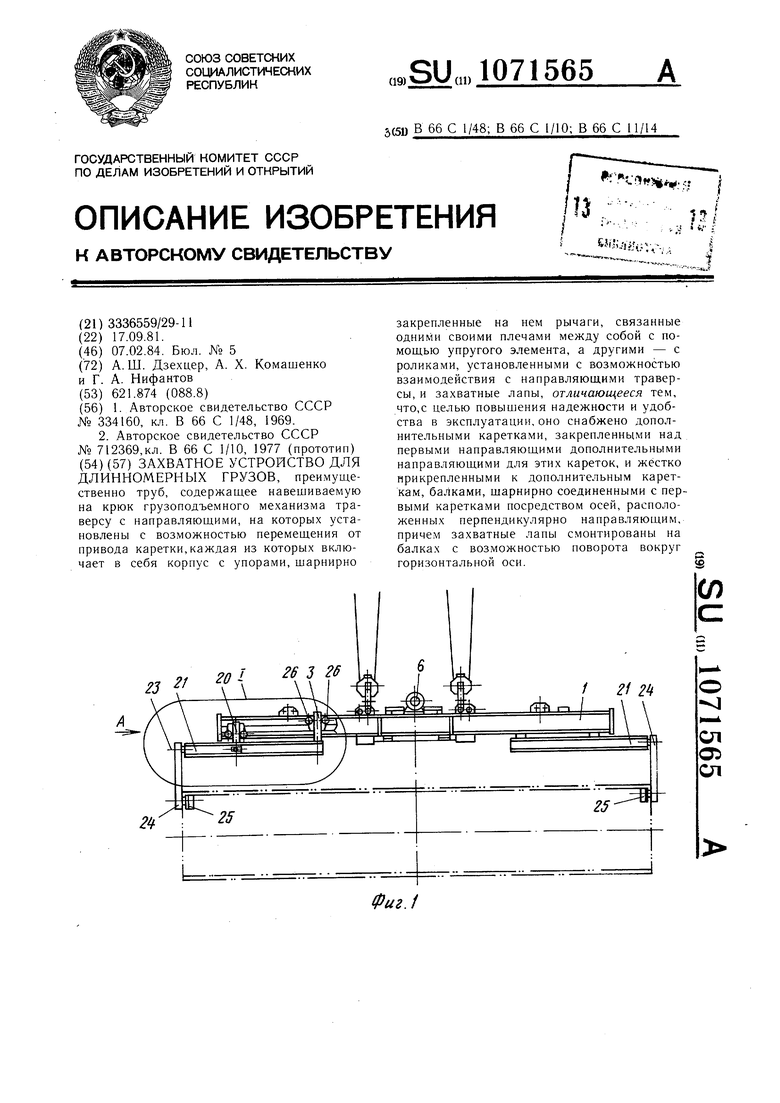
19
Фиг Л /7
Фиг.§
Фиг. 7
Г - Г
Фиг. 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРУБ | 0 |
|
SU334160A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каретка грузозахватного устройства | 1977 |
|
SU712369A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
