(54) ГРЕЙФЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2449903C1 |
| ЧЕЛЮСТНОЙ ПОГРУЗЧИК-ИЗМЕЛЬЧИТЕЛЬ | 1991 |
|
RU2025948C1 |
| Грейфер | 1986 |
|
SU1390170A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Машина для заготовки пневой древесины | 1979 |
|
SU869682A1 |
| Грейфер | 1987 |
|
SU1495269A1 |
| Грейфер | 1983 |
|
SU1183446A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2088075C1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
1
Изобретение относится к лесной промышленности и может быть использовано в манипуляторах, преимущественно при обработке отходов лесозаготовок.
Известен захват, содержащий раму, поворотные от привода основные и дополнительные челюсти 1.
Недостатком известного захвата является то, что при освобождении захвата от отходов лесозаготовок отдельные сучья остаются неориентированными.
Цель изобретения - повышение эффективности в эксплуатации путем повышения степени ориентации лесосечных отходов при их разгрузке.
Цель достигается те.м, что на раме закреплены дополнительные челюсти.
Кроме того, дополнительные челюсти выполнены в виде пластин.
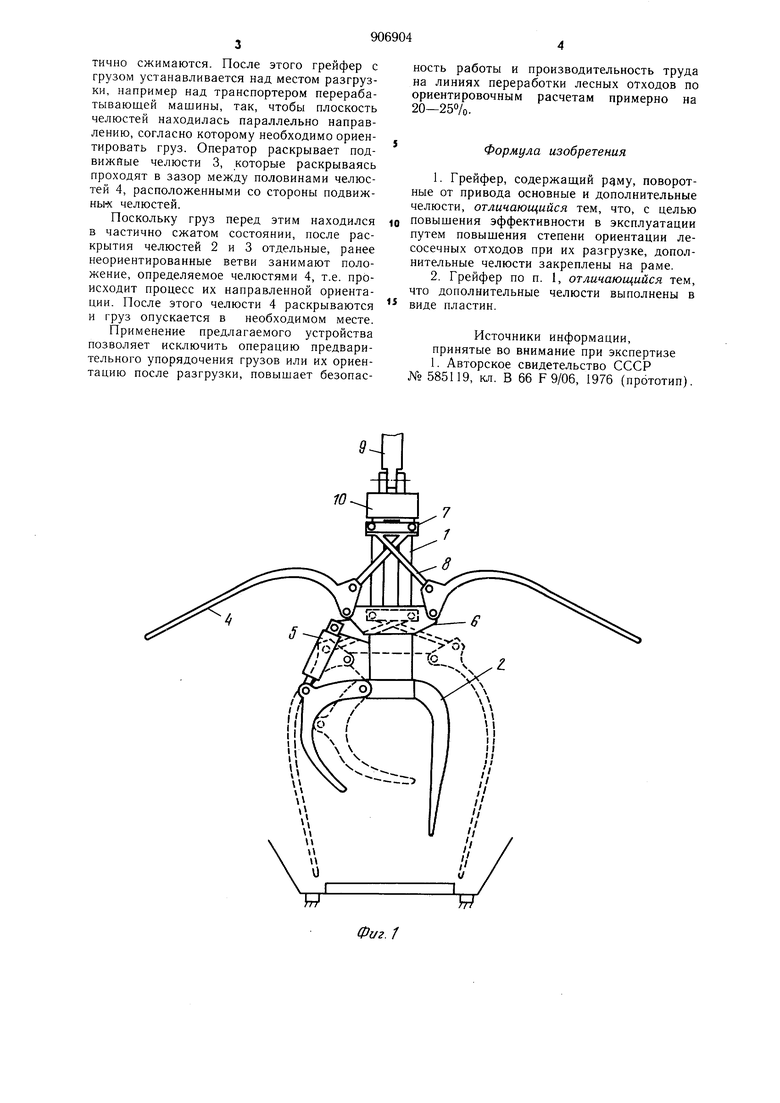
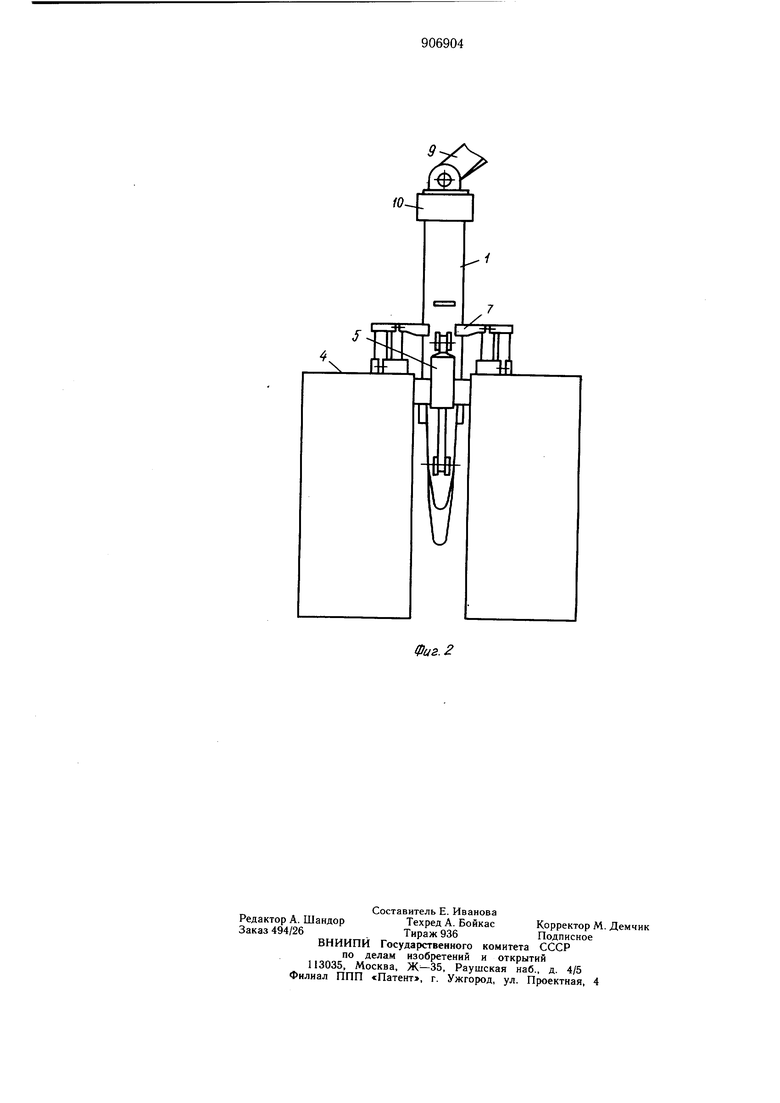
На фиг. 1 изображен грейфер, общий вид; на фиг. 2 - грейфер в закрытом положении, вид сбоку.
Грейфер включает раму 1, неподвижные 2, приводные 3 и пластинчатые 4 челюсти. Приводные челюсти 3 щарнирно соединены со щтоком гидроцилиндра 5, закрепленного на раме 1. На раме 1 подвижно установлена рама 6, на которой щарнирно закреплены дополнительные челюсти 4.
Внутри рамы 1 вертикально расположен гидроцилиндр (не показан), щток которого жестко связан с кольцом 7, охватывающим раму 1 и имеющим возможность перемещения по нему. Кольцо 7 посредством тяг 8 соединено с челюстями 4. Одна из дополнительных челюстей 4, расположенная со стороны подвижных челюстей 3, выполнена из двух частей, между которыми оставлен за10зор для прохода челюсти 3.
Грейфер присоединен к стреле 9 манипулятора при помощи поворотного устройства 10.
Грейфер работает следующим образом.
Перед захватом груза оператор при по15мощи цилиндра, расположенного внутри рамы 1, приводит в движение кольцо 7 и раскрывает челюсти 4, а при помощи гидроцилиндра 5 - челюсти 3. При помощи стрелы 9 и поворотного устройства 10 углуб20ляют челюсти 2 и 3 в кучу отходов лесозаготовок и захватывают необходимое кйличество сырья. После подъема захваченного груза челюсти 4 прикрываются, при этом направленные в разные стороны ветви частично сжимаются. После этого грейфер с грузом устанавливается над местом разгрузки, например над транспортером перерабатывающей машины, так, чтобы плоскость челюстей находилась параллельно направлению, согласно которому необходимо ориентировать груз. Оператор раскрывает подвижные челюсти 3, которые раскрываясь проходят в зазор между половинами челюстей 4, расположенными со стороны подвижны-к челюстей.
Поскольку груз перед этим находился в частично сжатом состоянии, после раскрытия челюстей 2 и 3 отдельные, ранее неориентированные ветви занимают положение, определяемое челюстями 4, т.е. происходит процесс их направленной ориентации. После этого челюсти 4 раскрываются и груз опускается в необходимом месте.
Применение предлагаемого устройства позволяет исключить операцию предварительного упорядочения грузов или их ориентацию после разгрузки, повышает безопасность работы и производительность труда на линиях переработки лесных отходов по ориентировочным расчетам примерно на 20-25%.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 585119, кл. В 66 F9/06, 1976 (прототип).
