Изобретение относится к системам управления электроприводами поворота одноковшовых экскаваторов, а также и других механизмов с изменяющимися в процессе движения параметрами механической части, управление скоростью которых производится как регулированием напряжения на якоре, так и регулированием потока возбуждения.
Известны системы двухзонного регулирования с зависимым управлением потоком возбуждения, в которых ослабление поля осуществляетсяав функции частоты вращения двигателя 1.
Недостатком таких систем является обязательное н.аличие тахогенератора, который вносит в систему трудноустраняемую нестабильность из-за оборотных и коммутационных пульсаций. Кроме того в экскаваторных электроприводах из-за тяжелых условий эксплуатации тахогенераторы не применяются.
Известно также устройство для управления электроприводом одноковшового экскаватора, содержащее задатчик интенсивности, датчик и регуляtop ЭДС регулятор тока якоря, датчик
-И регулятор потока, регулятор токдвозбуждения 2.
Недостатком этого устройства явс ляется появление бросков тока якорнс цепи в моменты переключения с регулирования ЭДС на регулирование потока и, наоборот/ с регулирования потока на регулирование ЭДС. Это
jQ объясняется тем, что в астатических системах управления объектами с переменными параметрами механической части при суммарном порядке астатизма системы, равном порядку задающего воздействия, в установившихся динамических режимах появляется ошибка между сигналом задания на изменение величины и действительной управляемой величиной, значение которой зав1{рит от изменяющихся параметров механической части объекта управления. Эта переменная по величине ошибка, возниксцощая в астатической системе первого порядка при Линейном изменении задания, и обуславливает появление бросков тока в моменты переключений с регулирования одного параметра на регулирование другого параметра, так как в эти моменты .действительное значение частоты вра30 1щения двигателя не равно заданному.
Кроме того система управления в периоды регулирования потока становится разомкнутой по частоте вращения двигателя, что ухудшает динамические показатели регулирования и способствует появлению бросков тока якорной цепи в периоды изменения потока, что снижает надежность управления.
Цель изобретения - повышение надежности электропривода.
Это достигается тем, что устройство снабжено пороговым и ключевым элементами, логическим блоком и функциональным преобразователем, выход которого через ключевой элемент соединен с задатчиком интенсивности, причем управляющий вход ключевого элемента соединен с выходом порогового элемента и с входом логического блока, выход которого соединен с одним из входов регулятора ЭДС.
При этом логический блок выполнен в виде сумматора, размыкающего и замыкающего ключей и запоминающего звена, вход которого связан с размыкающим ключом, а выход - со входом сумматора, выход которого связан с замыкающим ключом.
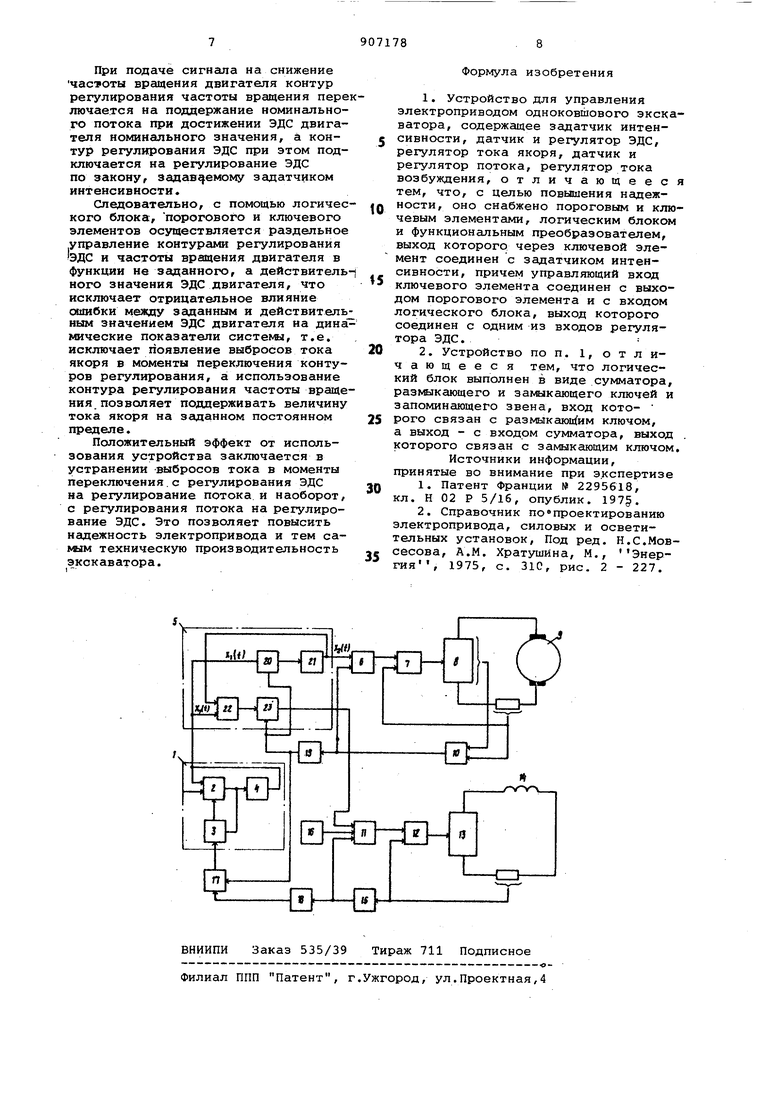
На чертеже приведена функциональная схема устройства.
Устройство содержит задатчик 1 интенсивности, состоящий из последовательно включенных релейного элемента 2 с регулируемым узлом 3 ограничения в цепи его обратной связи и интегратора 4, и два раздельных контура регулирования: ЭДС и частоты вращения, с которыми задатчик 1 интенсивности связан через логический блок 5. Контур регулирования ЭДС состоит из последовательно соединенных регулятораб ЭДС регулятора 7 тока, управляемого преобразователя 8 и двигателя 9, Обратная связь осуществляется с помощью датчика 10 ЭДС, выход которого связан с входом регулятора 6 ЭДС На вход регулятора ЭДО поступает задающий сигнал с выхода логического блока 5.
Контур регулирования частоты вращения в качестве внутреннего включает контур регулирования потока, состоящий из последовательно соединенных регулятора 11 потока, регулятора 12 тока возбуждения и преобразователя 13 напряжения, выходом сс единенного с обмоткой 14 возбужден{1я двигателя. Функцию обратной связи контура регулирования потока выполняет датчик 15 потока, выходом связанный с входом регулятора 11 потока. Также на вход регулятора 11 поступают постоянный сигнал от ис|точника 16 напряжения и задающий сигнал с выхода логического блока 5,
Функцию обратной связи по частоте вращения двигателя выполняют последовательно соединенные через ключе. вой элемент 17 функциональный преобразователь 18 и регулируемый узел 5 3 ограничения, причем вход функционального преобразователя 18 связан с выходом датчика 15 потока. Управ|ляющие входы логического блока 5 и ключевого элемента 17 соединены с выходом датчика 10 ЭДС через пороговый элемент 19. Логический блок 5, ключевой элемент 17 и пороговый элемент 19 служат для определения моментов переключения контуров регулирования в устройстве.
Логический блок 5 в свою очередь
включает размыкающий ключ 20 выходом соединенный с входом запоминающего звена 21, которое выходом связано с входом сумматора 22, а выход сумматора 22 подключен ко входу замыкаю щего ключа 23.
Устройство работает следующим образом.
Регулирование частоты вращения от нуля до основной ведется при помощи систе)мы подчиненного регулирования ЭДС, в которую входят регулятор б ЭДС регулятор 7 тока, управляемый преобразователь 8, двигатель 9 и датчик 10 ЭДС. Закон изменения ЭДС
(частоты вращения) задается при помощи задатчика 1 интенсивности, выход которого связан через логический блок 5 с входом регулятора б ЭДС. Логический блок выполняет функцию разделения контуров регулирования.
Работа этого элемента происходит по следующему алгоритму.
Пока ЭДС двигателя не достигла номинального значения, а следовательно, частота вращения двигателя основной, управляющий сигнал, поступающий с выхода датчика 10 ЭДС через пороговый элемент 19 на вход логического блока 5, равен нулю. При равенстве нулю управляющего
сигнала логический блок 5 реализует функцию
X2(t) х (t) ; XgCt) , где х (t)- - выходной сигнал задатчика интенсивности;
x-(t) - выходной сигнал логического блока на регулирование ЭДС;
x,(t) - выходной сигнал логического блока на регулирование потока.
Этот алгоритм реализуется следующим образом.
Сигнал с задатчика 1 интенсивности поступает на размыкающий ключ 20 и сумматор 22 логического блока 5. Размыкающий ключ 20 пропускает сигнал х(t) на запоминающее звено 21, так как при отсутствии управляющего сигнала с порогового элемента 19 размыкающий ключ 20 замкнут. При
поступлении сигнала от- размыкающего ключа 20 запоминающее звено 21 работает в режиме воспроизведения входного сигнала X2.(t) х (t) . Сигнал от сумматора 22 через замыкающий ключ 23 не проходит в это время на регулятор потока 11, так как при отсуЕствии управляющего сигнала с порогового элемента 19 замыкающий ключ 23 разомкнут.
Следовательно, в этот период к задатчику интенсивности подключен контур регулирования ЭДС, а на вход контура .регулирования потока подается постоянный сигнал от источника 1 напряжения, соответствующий заданию номинального потока. На управляющий вход ключевого элемента 17 при ЭДС двигателя меньше номинальной не поступает сигнал с порогового элемента 19, поэтому ключевой элемент разрывает цепь обратной связи по частоте вращения между функциональным преобразователем 18 и регулируемым узлом 3 ограничения релейного элемента 2.
При достижении ЭДС номинального значения, сигнал с датчика 10 ЭДС превышает значения зоны нечувствительности элемента 19 и поступает на управляющие входы ключевого элемента 17 и логического блока 5. При поступлении управляющего сигнала с датчика ЭДС через пороговый элемент 19 на управляющий вход логического блока 5 на его выходе реализуется функция
XgiCt) ) const,
X5(t) X;,t)- X (t)
где x(t) - значение выходного сигнала задатчика интенсивности в момент пробо порогового элемента 19.
Формирование этой функции происходит следующим образом.
При поступлении сигнала от порогового элемента 19 на управляющие входы размыкающего и замыкающего ключей размыкающий ключ 20 разрывае цепь: задатчик 1 интенсивности - запоминающее звено 21, а замыкающий ключ 23 подключает сумматор 22 к входу регулятора 11 потока. После коммутационных переключений с выхода запоминающего звена 21 на вход регулятора 6 ЭДС начинает поступать сигнал X2(t) х (t) const, так как при размыкании ключа 20 на выходе запоминающего звена 21 запоминается мгновенное значение входной переменной в момент размыкания, а на вход регулятора 11 потока с выхода сумматора 22 в то же время начинает поступать сигнал
X3(t) х (t) - ,).
Следовательно, с этого момента в контур регулирования ЭДС начинает поступать постоянный сигнал, а на регулирование подключается контур
регулирования частоты вращения двигателя, в момент подключения сигнал, поступающий от задатчика 1 интенсивности через логический блек 5 на вход регулятора 11 потока, равен нулю, что исключает появление выбросов тока якоря в период коммутации, так Kak устраняется влияние ощибки между заданным и действительным значением ЭДС на динамические показатели системы регулирования.
o Величина потока регулируется суммарным сигналом задания х - x.j (t) , , поступакнцим на вход регулятора 11 потока, где хд const - сигнал, от источник-а 16 напряжения. Сигнал
s x(t) x/((t) - x(t() изменяется за счет вариации сигнала х(t), поступающего с выхода интегратора 4 задатчика 1 интенсивности,так как сигнал х (i) в процессе регулирования
0 остается постоянным. С момента поступления сигнала от Датчика 10 ЭДС на управляющие входы логического блока 5 и ключевого элемента 17 вступает в действие контур регулирования частоты вращения, в который входит
5 ,в качестве внутреннего контур регулирования потока, а функцию главной обратной связи по частоте вращения выполняют, последовательно соединенные через ключевой элемент 17, функ0циональный преобразователь 18 и регулируемый узел 3 ограничения релейного элемента 2. Интегратор 4 задатчика 1 интенсивности в периоды изменения потока выполняет функцию ин5тегрального регулятора частоты вращения, что позволяет в эти периоды поддерживать ток якоря на уровне заданного постоянного значения. Использование интегратора 4 задатчика
0 1 интенсивности в функции интегрального регулятора частоты вращения в периодам изменения потока оказалось возможным потому, что в эти периоды обратная связь, охватывающая интегратор 4 и релейный элемент 2, не
5 оказывает действия на функционирование этих элементов.
Формирование сигнала, пропорционального частоте вращения двигателя, в зтй периоды осуществляется в функ0циональном преобразователе 18, так как в эти периоды ЭДС двигателя постоянна, и частота вращения определяется как
и -
5 дв СеФ Ф
где Е const - значение ЭДС двигателя в периоды подключения контура регулирования частоты
0 вращения;
Cg - конструктивный коэффициент;
Ф - поток
К р- const..
65
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации соотношения нагрузок клетей при периодической прокатке | 1981 |
|
SU978963A1 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1256126A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Устройство для управления асинхронными короткозамкнутым двигателем | 1980 |
|
SU877769A1 |
| Способ автоматического управления частотно-регулируемого электропривода и устройство для осуществления этого способа | 1975 |
|
SU558366A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
