С целью упрощения предлагаемый способ автоматического регулирования напряжения статического преобразователя частоты, питающего асинхронный двигатель несинусоидальным напряжением в режиме прерывистого тока по закону постоянства магнитного потока двигателя, требует первой гармоники напряжения и тока, а в устройстве для его реализации не содержится решающий элемент для вычисления ЭДС намагничивающего контура.
Предлагаемый способ отличается от известного тем, что в цепи обратной связи замкнутой системы частотного регулирования используется электрический сигнал, который измеряется в бестоковые интервалы непосредственно на зажимах обмотки статора двигателя и представляет собой наводимую результирующим магнитным потоком ЭДС, пропорциональную этому потоку при заданной частоте.
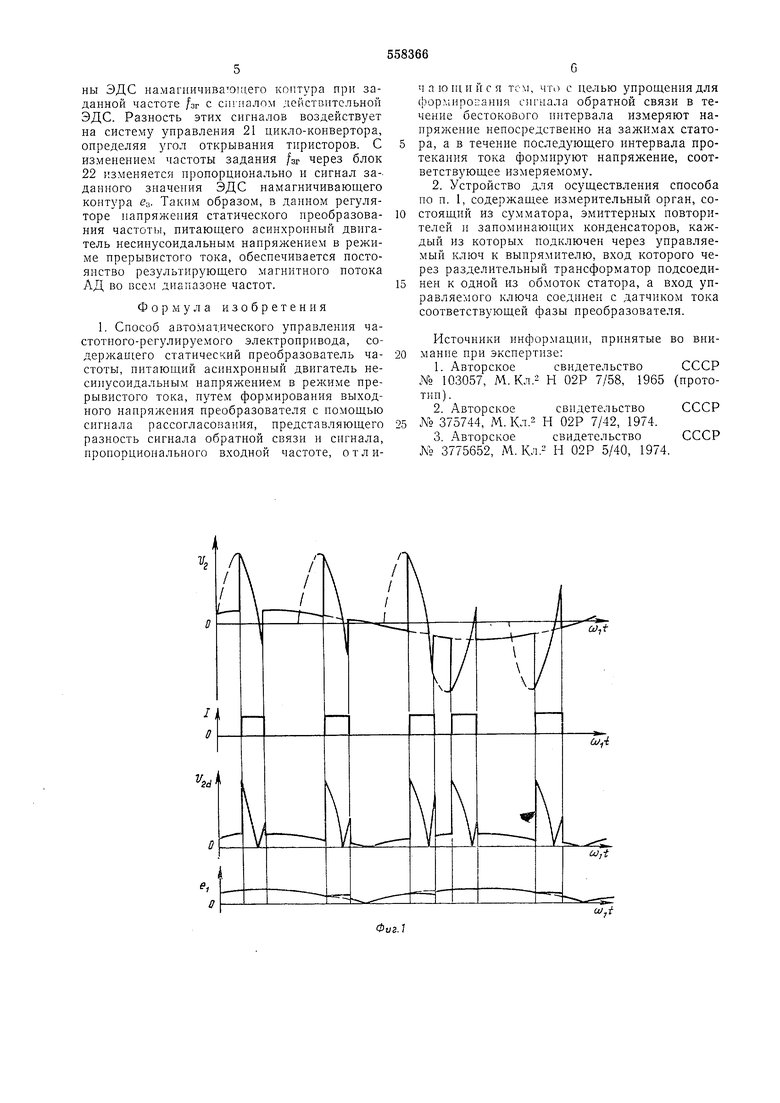
В режиме короткого замыкания поток от высших гармоник в намагничивающем контуре мал и им можно пренебречь. Таким образом, результирующий магнитный поток представлен первой гармоникой. Он наводит в обмотках статора двигателя ЭДС, которая в бестоковые интервалы времени близка к синусоиде, показанной на фиг. 1. Данная ЭДС, пропорциональная результирующему магнитному потоку, измеряется в Оестоковый интервал, формируется в непрерывную кривую, и подается в цепь обратной связи для регулирования напряжения статического преобразователя частоты по закону поддержания постоянства магнитного потока.
Таким образом, непосредственно получаем величину ЭДС намагничивающего контура без каких-либо фильтров для выделения первой гармоники напряжения и тока и без необходимости иметь решающее устройство для вычисления ЭДС.
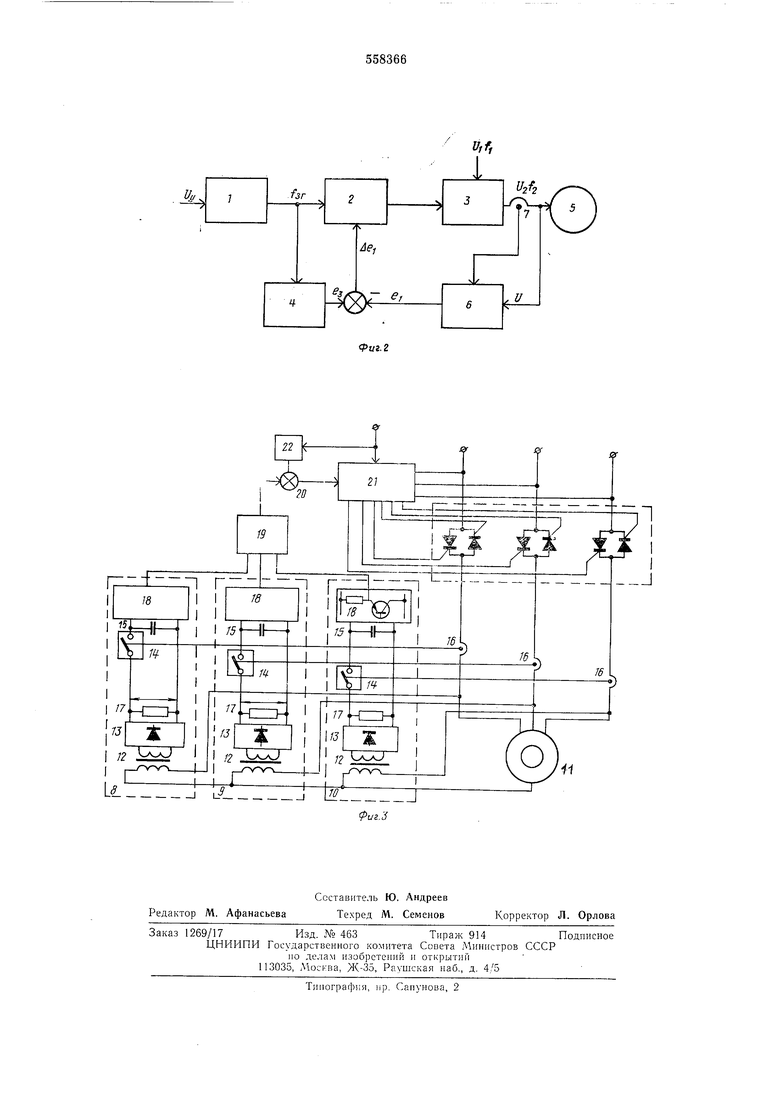
На фиг. 2 показана блок-схема регулятора для осуществления предложенного способа регулирования напряжения статического преобразователя частоты, питающего асинхронный двигатель несинусоидальным напряжением в режиме прерывистого тока.
Задающая частота определяется сигналом fsT, который поступает от задающего генератора 1 в систему управления 2 статическим преобразователем частоты 3 и в функциональный преобразователь «частота-напряжение 4. На выходе преобразователя 4 получается сигнал вз, пропорциональный заданной величине ЭДС намагничивающего контура асинхронного двигателя 5. Система управления 2 обеспечивает управление частотой / и углом а открывания вентилей преобразователя 3. Выходное напряжение t/2 (см. фиг. 1) преобразователя 3, состоящее из ЭДС намагничивающего контура и участков синусоид сетевого напряжения t/i, подаетя в электронную, схему 6. Туда же поступает от датчика 7 сигнал / (фиг. 2) о наличии тока в фазе
статора двигателя для определения границ бестокового интервала, в течение которого производится измерение ЭДС. Устройство 6, формирующее непрерывную кривую ЭДС на основании ее величины на участках измерения, может быть реализовано в зависимости от конкретного вида преобразователя частоты 3. На фиг. 3 приведена принципиальная схема
регулятора.
Получение сигнала, пропорционального среднему значению ЭДС результирующего магнитного потока, которое необходимо для регулирования напряжения преобразователя
частоты в соответствии с законом постоянства потока, осуществляется с помощью трех (по числу фаз) одинаковых электронных схем 8, 9, 10.
Рассмотрим работу одной электронной схемы. Напряжение с фазы асинхронного двигателя И подается на разделительный трансформатор 12, выпрямляется однофазным мостовым выпрямителем 13 и через ключ 14 поступает на запоминающий конденсатор 15.
Ключ 14 замкнут при отсутствии тока в данной фазе двигателя и разомкнут при наличии тока в ней. Наличие тока в фазе двигателя контролируется датчиком 16. Напряжение на запоминающем .конденсаторе 15 следует за
напряжением на фазе двигателя в бестоковый интервал времени, и равно ЭДС намагничивающего контура. При наличии тока в данной фазе напряжение на конденсаторе 15 удерживается на уровне, равном значению
напряжения в конечный момент бестоковой паузы. Запоминание этого уровня происходит благодаря размыканию ключа 14 при появлении тока в фазе двигателя. Соответствующим выбором емкости конденсаторов 15 и величины разрядных резисторов 17 можно достичь пренебрежимо малого снижения уровня запоминаемого напряжения при точном воспроизведении участка измерения ЭДС. Таким образом, на выходе эмиттерного повторителя 18 формируется напряжение, состоящее из полуволн, образованных полусинусоидами ЭДС, которые на участках протекания тока искажены горизонтальными «ступеньками запоминания (фиг. 1). Среднее значение полуволны с высокой степенью точности равно среднему значению полусинусоиды ЭДС, т. к. горизонтальные участки имеют незначительную протяженность, а, кроме того, их наличие на восходящем участке,
где они вырезают площадки напряжения, компенсируются в значительной степени наличием таких же ступеней на нисходящем участке, когда происходит добавление аналогичных площадок напряжения. Выходные
сигналы с эмиттерных повторителей 18 суммируются в сумматоре 19, из которого сигнал, пропорциональный среднему значению реальной ЭДС намагничивающего контура, поступает на элемент сравнения 20, где происходит сравнение сигнала заданной величины ЭДС намаг1 ичива0 цего контура при заданной частоте /зг с сигналом действительной ЭДС. Разность этих стткалов воздействует на систему управления 21 цикло-конвертора, определяя угол открывания тиристоров. С изменением частоты задания fsr через блок 22 изменяется пропорционально и сигнал за-, данного значения ЭДС намагничивающего контура е-. Таким образом, в данном регуляторе напряжения статического преобразования частоты, нитающего асинхронный двигатель несинусоидальным напряжением в режиме прерывистого тока, обеснечивается постоянство результирующего магнитного иотока АД во всем диапазоне частот.
Формула изобретения
1. Способ автоматического управления частотного-регулируемого электропривода, содержащего статический преобразователь частоты, питающий асинхронный двигатель несинусоидальным напряжением в режиме прерывистого тока, путем формирования выходного напряжения преобразователя с помощью сигнала рассогласования, представляющего разность сигнала обратной связи и сигнала, пропорционального входной частоте, отличаю HUI и с я тем, что с целью упрощения для формирования сигнала обратной связи в течение бестокового интервала измеряют напряжеиие непосредственно на зажимах статора, а в течение последующего интервала протекания тока формируют напряжение, соответствующее измеряемому.
2. Устройство для осуществления способа по п. 1, содержащее измерительный орган, состоящий из сумматора, эмиттерных повторителей и запоминающих конденсаторов, каждый из которых подключен через управляемый ключ к выпрямителю, вход которого через разделительный трансформатор подсоедийен к одной из обмоток статора, а вход управляемого ключа соединен с датчиком тока соответствующей фазы преобразователя.
Источники информации, принятые во внимание при экспертизе:
1.АвторскоесвидетельствоСССР № 103057, М. Кл.2 Н 02Р 7/58, 1965 (прототип).
2.АвторскоесвидетельствоСССР Л 375744, М. Кл.2 н 02Р 7/42, 1974.
3.АвторскоесвидетельствоСССР Л 3775652, М. Кл.2 н 02Р 5/40, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМРОТОРОМ | 1979 |
|
SU849402A1 |
| Электропривод с частотно-импульсным управлением | 1983 |
|
SU1145445A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя | 1983 |
|
SU1121633A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
1Д
V,,i.
и/ iTtrn rr
