дения напряжения на активном сопротивлении обмоток статора Д. В устр-во введены блоки 18 деления, источники 19 опорного сигнала, диоды 20, а блок 17 вьтолнен на операционном усилителе 21 с резисторами 22, 23 и управляемых ключевых элементах 24, Устр-во позволяет с помощью элементов 16, 18 и 19 определить наиболее нагруженный Д пуИзобретение относится к электротехнике и может быть использовано в автоматизированных электроприводах переменного тока со статическими преобразователями частоты.
Цель изобретения - повьшение перегрузочной способности.
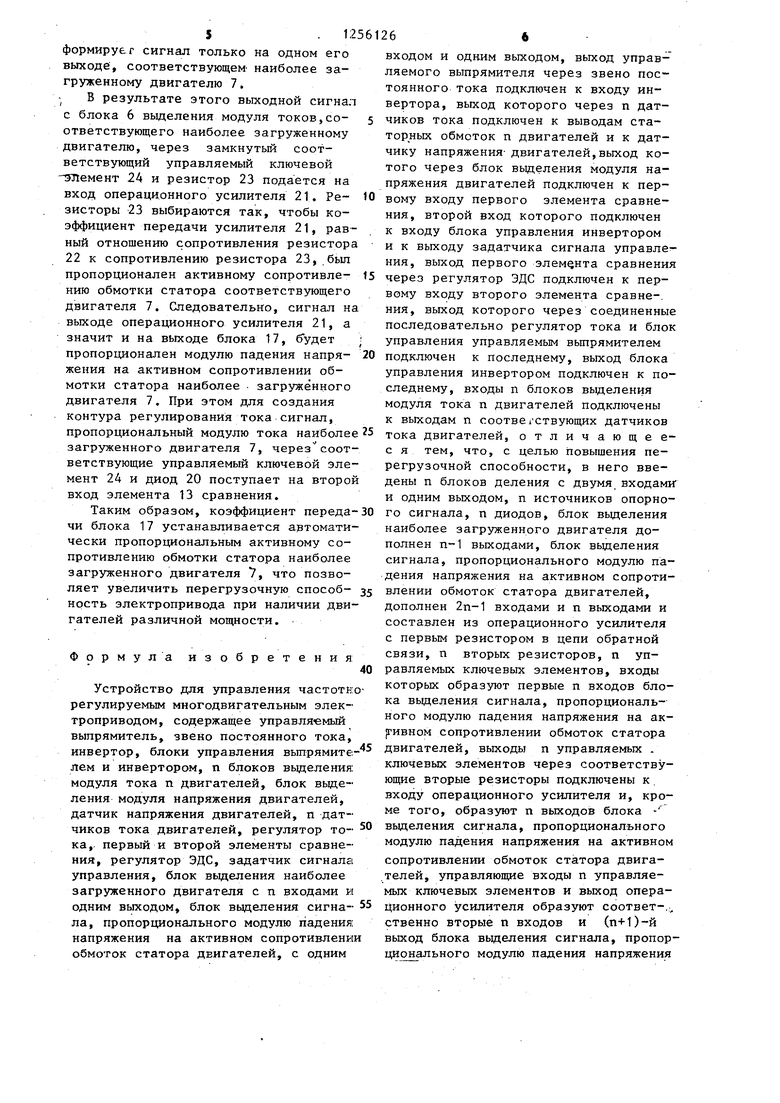
На фиг.1 приведена блок-схема уст- Ьойства; на фиг.2 - блок-схема блока вьщеления наиболее загруженного дви- гателя.
Устройство содержит управляемый выпрямитель 1, звено 2 постоянного тока, инвертор 3, блоки 4 и 5 управления выпрямителем 1 и инвертором 3, п блоков 6 вьщеления модуля токов ц двигателей 7, блок 8 вьзделения модуля напряжения двигателей 7, датчик 9 напряжения двигателей 7, п датчиков 10 тока двигателей 7, регулятор 11 тока, первый 12 и второй 13 элементы сравнения, регулятор 14 ЭДС, задатчик 15 сигнала управления, блок 16 выделения наиболее загруженного двигателя с п входами и одним выходом, блок 17 вы- деления сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, с одним входом и одним выходом, выход управляемого вьшрямителя 1 через звено 2 постоянного тока подключен к входу инвертора 3, выход которого через п датчиков 10 тока подключен к выводам статорных обмоток двигателей 7 и к датчику 9 напряжения двигателей, выход которого через блок 8 вьщеления модуля напряжения двигателей 7 подключен к первому входу пер вого элемента 12 сравнения, второй вход которого Подключен к входу блока 5 управления инвертором 3 и к входу задатчика 15 сигнала управления, вытем сравнения фактического тока Д с его номинальным значением и автоматически установить коэффициент передачи блока 17 пропорциональным активному сопротивлению обмотки статора наиболее загруженного Д, что увеличивает перегрузочную способность ЭП при наличии Д различной мощности. 2ил.
ход первого элемента 12 сравнения через регулятор 14 ЭДС подключен к первому входу второго элемента 13 сравнения, выход которого через соединенные последовательно регулятор 11 тока и блок 4 управления вьшрямителем подключен к последнему, выход блока 5 управления инвертором 3 подключен к последнему, входы п блоков 6 вьщеления модуля тока двигателей 7 подключены к выходам п соответствующих датчиков 10 тока двигателей, п блоков 18 вьщеления с двумя входами и одним выходом, п источников 19 опорного сигнала, п диодов 20, блок 16 вьщеления наиболее загруженного двигателя дополнен п-1 выходами, блок 17 вьщеле- .ния сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, дополнен 2п-1 входами и п выходами и составлен из операционного усилителя 21 с первым резистором 22 в цепи обратной связи, п вторых резисторов 23j п управляемых ключевых элементов 24, входы которых образуют первые п входов блока 17 вьщеления сигнала, пропорционального модулю падения напряжения на активном сопротивлении об- . моток статора двигателей 7, выходы п управляемых ключевых элементов 24 через соответствующие вторые резисторы подключены к входу операционного усилителя 21 и, кроме того, образуют п выходов блока 17 вьщеления сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей 7, управ- лякяцие входы п управляемых ключевых элементов и выход операционного усилителя 21 образуют соответственно вторые п входов и n+1-й выход блока
17 выделения сигнала, пропорционального модулю падения напряжения на ак- ,тивном сопротивлении обмоток статора двигателей, блок 16 выделения наибо- . лее загруженного двигателя составлен из. узла 25 вьщеления максимального сигнала (фиг.2) с п входами, образующими п входов блока 16 вьщеления наиболее загруженного двигателя, и однаиболее загруженного двигателя 7. В элементе 13 сравнения этот сигнал сравнивается с сигналом, пропорциональным модулю тока наиболее загруженного двигателя, и их разница поступает на регулятор 11 тока, выходной сигнал которого поступает на блок 4 управления выпрямителем 1.
Так как номинальные токи двигатеним выходом, п элементов 26 сравнения 10 лей различной установленной мощности п пороговых элементов 27, п логических элементов НЕ 28, выходы которых образуют п выходов блока 16 выделения сигнала наиболее загруженного двигателя, один вход каждого элемента 26 сравнения подключен к соответствующему входу узла 25 выделения максимального сигнала, выход которого подклк
различны, то определить наиболее загруженный двигатель можно только срав нив величины относительных токов, определяемых как отношение фактического тока двигателя к номинальному. Поэтому входы блока 16 вьщеления наиболее загруженного двигателя подключены к выходам блоков 6 вьщеления модулей токов двигателей через блоки 18 деления.
2
30
чен к другому входу каждого .элемента 26 сравненияJ выходы которых через соответствующие пороговые элементы 27 подключены к входам соответствующих логических элементов НЕ 28, первый и второй входы п блоков 18 деления подключены соответственно к выходам п блоков 6 выделения модуля тока и двигателей 7 и к выходам п источников 19 опорного сигнала, выходы п блоков деления подключены к п входам блока 16 вьзделения наиболее загруженного двигателя, выходы п блоков 6 вьщеления модуля тока п двигателей 7 и п выходов блока 16 вьщеления наиболее загруженного двигателя подключены соответственно к первым и вторым входам35 блока 17 выделения сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей 7, п выходов и п+ + 1-Й выход которого подключены соот- 4 ветственно к анодам п диодов 20 и к третьему входу первого элемента 12 сравнения, катоды п диодов объединены и подключены к второму входу второго элемента 13 сравнения. 45
Устройство работает следующим образом.
На блок 5 управления инвертором 3 и регулятор 14 ЭДС поступает сигнал с задатчика 15 сигнала управления, 50 который однозначно определяет частоту вращения электродвигателей 7 и ЭДС наиболее загруженного двигателя. В элементе 12 сравнения формируется сигнал, пропорциональный модулю внут-55 ренней ЭДС наиболее загруженного дви- гателя. Выходной сигнал регулятора 14 ЭДС является заданием тока статора
наиболее загруженного двигателя 7. В элементе 13 сравнения этот сигнал сравнивается с сигналом, пропорциональным модулю тока наиболее загруженного двигателя, и их разница поступает на регулятор 11 тока, выходной сигнал которого поступает на блок 4 управления выпрямителем 1.
Так как номинальные токи двигате10 лей различной установленной мощности
0
5
0
различны, то определить наиболее загруженный двигатель можно только сравнив величины относительных токов, определяемых как отношение фактического тока двигателя к номинальному. Поэтому входы блока 16 вьщеления наиболее загруженного двигателя подключены к выходам блоков 6 вьщеления модулей токов двигателей через блоки 18 деления.
Сигналы, пропорциональные номинальным значениям токов используемых двигателей 7, устанавливаются источниками 19 опорных сигналов и подаются на вторые входы блоков 18 деления. В результате деления на входах блока 16 выделения наиболее загруженного двигателя формируются сигналы , пропорциональные относительным величинам фактических токов двигателей 7.
Полученные сигналы с выходов блоков 18 деления поступают на вход узла 25 вьщеления максимального сигнала и на вторые входы соответствующих п элементов 26 сравнения, где сравниваются с максимальным из входных сигналов (фиг.2). На выходе только одного элемента 26 сравнения, соответствующего каналу максимального загруженного двигателя, формируется нулевой уровень, а на выходах остальных - положительный сигнал определенной величины. Сигналы с выходов элементов 26 сравнения через пороговые элементы 27 поступают на входы соответствующих логических элементов НЕ 28. В результате на одном из выходов блока 16, соответствующем каналу наиболее загруженного электродвигателя 7, появляется сигнал, а на остальных выходах блока 16 сигналы отсутствуют.
Таким образом, блок 16 вьщеляет наиболее загруженный двигатель 7 и на соответствующем его выходе появляется сигнал, который воздействует на соответствующий управляемый ключевой элемент 24 во входной цепи операционного усилителя 21 (фиг.1). Блок 16
формирует сигнал только на одном его выходе, соответствующем- наиболее загруженному двигателю 7. В результате этого выходной сигнал с блока 6 вьщеления модуля токов,со- ответствующего наиболее загруженному двигателю, через замкнутый соответствующий управляемый ключевой -элемент 24 и резистор 23 подается на вход операционного усилителя 21. Ре- зисторы 23 выбираются так, чтобы коэффициент передачи усилителя 21, равный отношению сопротивления резистора 22 к сопротивлению резистора 23, был пропорционален активному сопротивле- нию обмотки статора соответствующего двигателя 7. Следовательно, сигнал на выходе операционного усилителя 21, а значит и на выходе блока 17, будет пропорционален модулю падения напря- жения на активном сопротивлении обмотки статора наиболее загруженного двигателя 7. При этом для создания контура регулирования тока сигнал, пропорциональный модулю тока наиболее загруженного двигателя 7, через соответствующие управляемый ключевой элемент 24 и диод 20 поступает на второй вход элемента 13 сравнения.
Таким образом, коэффициент передачи блока 17 устанавливается автоматически пропорциональным активному сопротивлению обмотки статора наиболее загруженного двигателя 7, что позволяет увеличить перегрузочную способ- ность электропривода при наличии двигателей различной мощности.
40
Формула изобретения
Устройство для управления частотно- регулируемым многодвигательным электроприводом, содержащее управляемый выпрямитель, звено постоянного тока, инвертор, блоки управления выпрямите- лем и инвертором, п блоков вьщеления: модуля тока п двигателей, блок вьщеления модуля напряжения двигателей, датчик напряжения двигателей, п датчиков тока двигателей, регулятор то- ка, первый и второй элементы сравнения, регулятор ЭДС, задатчик сигнале управления, блок вьщеления наиболее загруженного двигателя с п входами и одним выходом, блок вьщеления сигна- 55 ла, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, с одним
0 5 0 5
0
0
5
входом и одним выходом, выход управляемого выпрямителя через звено пос тоянного тока подключен к входу инвертора, выход которого через п датчиков тока подключен к выводам ста- торных обмоток п двигателей и к датчику напряжения-двигателей,выход ко- того через блок вьщеления модуля напряжения двигателей подключен к первому входу первого элемента сравнения, второй вход которого подключен к входу блока управления инвертором и к выходу задатчика сигнала управления, выход первого элемента сравнения через регулятор ЭДС подключен к первому входу второго элемента сравне-. ния, выход которого через соединенные последовательно регулятор тока и блок управления управляемым вьшрямителем подключен к последнему, выход блока управления инвертором подключен к последнему, входы п блоков вьщеления модуля тока п двигателей подключены к выходам п соответствующих датчиков тока двигателей, отличающее- с я тем, что, с целью повышения перегрузочной способности, в него введены п блоков деления с двумя входами и одним выходом, п источников опорного сигнала, п диодов, блок вьщеления наиболее загруженного двигателя дополнен п-1 выходами, блок вьщеления сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, дополнен 2п-1 входами и п выходами и составлен из операционного усилителя с первым резистором в цепи обратной связи, п вторых резисторов, п управляемых ключевых элементов, входы которых образуют первые п входов блока вьщеления сигнала, пропорционального модулю падения напряжения на ак- ривном сопротивлении обмоток статора двигателей, выходы п управляемьпс . ключевых элементов через соответствующие вторые резисторы подключены к. входу операционного усилителя и, кроме того, образуют п выходов блока - вьщеления сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, управляющие входы п управляемых ключевых элементов и вькод операционного усилителя образуют соответ-,:, ственно вторые п входов и (п+1)-й выход блока вьщеления сигнала, пропорционального модулю падения напряжения
71256
на активном сопротивлении обмоток статора двигателей, блок выделения наиболее загруженного двигателя сое- тавлен из узла вьщеления. максималь- ного сигнала с п входами, образующими , п входов блока выделения наиболее загруженного двигателя, и одним выходом, п элементов сравнения, п пороговых элементов, п логических элементов НЕ, выходы которых образуют п выходов ю блока вьщеления наиболее загруженного двигателя, один вход каждого элемента сравнения подключен к соответствующему вхоДу узла вьщеления максимального сигнала, выход которого подклю- f5 чен к другому входу каждого элемента сравнения, выходы которых через соответствующие пороговые элементы подключены к входам соответствзпощих логических элементов НЕ, перввтй и вто- 20 рой входы п блоков деления подключены
Редактор С.Пекарь
Составитель В.Алешечкин
Техред И.Попович Корректор Е.Рошко
Заказ 4832/53Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
26 8
соответственно к выходам п блоков выделения модуля тока п двигателей и- к выходам п источников опорного сигнала, выходы п блоков деления подключены к п входам блока вьщеления наиболее загруженного двигателя, выходы п блоков вьщеления модуля тока п двигателей и п выходов блока вьделения наиболее загруженного двигателя подключены соответственно к первым и вторым п входам блока вьщеления сигнала, пропорционального модулю падения напряжения на активном сопротивлении обмоток статора двигателей, п выходов и (п+1)-й выход которого подключены соответственно к анодам а диодов и к третьему входу первого элемента сравнения, катоды п диодов объединены и подключены к второму входу второго элемента срав - нения,
d6/
фиг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| Способ синхронизации асинхронного электродвигателя | 1980 |
|
SU955485A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированных электроприводах (ЭП) переменного тока со статическими преобразователями частоты. Целью изобретения является повышение перегрузочной способности. Устр-во содержит управляемый выпрямитель 1, звено 2 постоянного тока, инвертор 3, блоки 4, 5 управления, блоки в выделения модуля токов, блок 8 выделения модуля напряжений, датчик 9 напряжения, датчики 10 тока, регулятор 11 тока, элементы 12, 13 сравнения, регулятор 14 ЭДС, задатчик 15 сигнала управления, блок 16 вьщеления наиболее загруженного двигателя (Д), блок 17 вьщеления сигнала, пропорционального модулю паS W фиг.1
| Танатар A.M | |||
| Методы регулирования скорости асинхронных двигателей | |||
| Киев: Техника, 1968, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
