Изобретение относится к гидроакустике. Известен лаг допплеровский гидро акустический, содержащий генератор частотно-модулированного зондирующе го сигнала, первый выход .которого соединен с входом излучателя, а.вто рой выход соединен с входом генератора вспомогательных сигналов, N бл ков усиления и обработки принятых сигналов, каждый из которых содержи последовательно соединенные приемный, гидрофон и усилитель, последовательно соединенные режекторный фильтр, первый смеситель и узкополосиый полосовой фильтр, причем вто рые входы первых смесителей каждого из N блоков усиления и обработки принятых сигналов соединены с соответствующими выходами генератора вспомогательных сигналов, а выходы всех узкополосных полосовых фильтров соединены с соответствующими входами вычислителя I1. Однако известное устройство имеет недостаточную точность измерения скорости движения судов. Цель изобретения - увеличение то ности измерения скорости движения судов. Поставленная цель достигается тем, что лаг допплеровский гидроакустический, содержащий генератор частотно-модулированного зондирующего сигнала. ,первый выход которого соединен с входом излучателя, а второй выход соединен с входом генератора вспомогательных сигналов, N блоков усиления и обработки принятых сигналов, касждый из которых содержит последовательно соединенные приемный гидрофон и усилитель, последовательно соединенные режекторный фильтр, первый смеситель и узкополосный полосовой фильтр, причем вторые входы первых смесителей каждого из N блоков усиления и обработки принятых сигналов соединены с соответствующими выходами генератора вспомогательных сигналов, а выходы всех узкополосных полосовых фильтров соединены с соответствующими входами вычислителя, в каждый блок усиления и обработки принятых сигналов введен второй смеситель, первый вход которого соединен с выходом усилителя, а выход соединен с входом режекторного фильтра соответствующего блока усиления и обработки принятых сигналов, вторые входы каждого из
смесителей соединены с третьим выходом генератора чдстотно-моду ированного зондирующего сигнала.
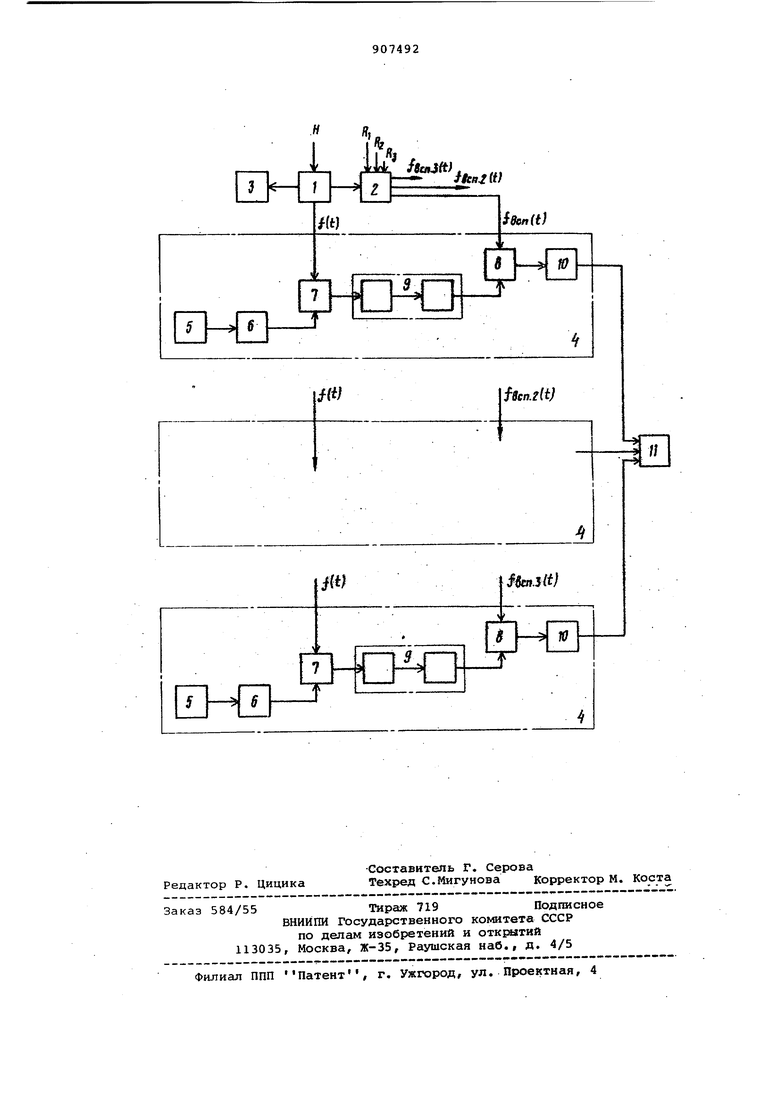
На чертеже изображена структурная электрическая схема предлагаемого устройства.
Устройство содержит генератор 1 частотно-модулированного зондирующего сигнала, генератор 2 вспомогательных сигналов, излучатель 3, блоки 4 усиления и обработки принятых сигналов, каждый из которых содержит приемный гидрофон 5, усилитель б, смесители 7 и 8, режекторный фильтр 9, узкополосный полосовой фильтр 10, вычислитель 11.
Устройство работает следукндим образом..
Частота генератора 1 изменяется с периодом, вдвое превышающим время задержкиотраженного от дна сигнала, для чего в генератор 1 вводится информация о глубине, которая берется либо с внешнего устройств (например эхолота), либо получается в измерителе скорости движения введением дополнительных устройств.
Полученные колебания излучаются излучателем 3 в направлениях, количество и структура которых определяется требованиями на точность измерения скорости объекта при наличии статических и динамических угловых эволюции.
Отраженные сигналы по каждому направлению принимаются приемным гидрофоном 5 соответствующего канала, усиливаются усилителем 6 и поступают в смеситель 7.
Далее полезный сигнал поступает на вход смесителя 8, на второй вход которого поступает сигнал с генератора 2.
Узкополосным полосовым фильтром 10 из спектра колебаний смесителя 8 выбирается составляющая и поступает
с выходов всех блоков 4 в вычислитель 11.
За счет глубокого подавления сигналов просачивания и объемной реверберации предлагаемое устройство обладает более высокой точностью.
Формула изобретения
Лаг допплеровский гидроакустический, содержац1ий генератор частотномодулированного зондирующего сигнала первый выход которого соединен с входом излучателя, а второй выход соединен с входом генератора вспомогательных сигналов, N блоков усиления и обработки принятых сигналов, каждый из которых содержит последовательно соединенные приемный гидрофон и усилитель, последовательно соединенные режекторный фильтр, первый смеситель и узкополосный полосовой фильтр, причем вторые входы первых смесителей каждого из N блоков усиления и обработки принятых сигналов соединен с соответствующими выходами генератора вспомогательных сигналов, а вы«ходаа всех узкополосных полосовых фильтров соединены с соответствующими входами вычислителя, от л ичающийся тем, что, с целью увеличения точности измерения скорости движения ЧУДОВ, в каждый блок усиления и обработки принятых сигналов введен второй смеситель, первый вход которого соединен с выходом усилителя, а выход соединен с входом режекторного фильтра соответствующего блока усиления и обработки принятых сигналов, вторые входы каждого и вторых смесителей соединены с третьим выходом гекератора частотно-модулированного зондирующего сигнала.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3435721, кл. G 01 S 9/66, 1965 (прототип).
Иff,
1 Ik
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2517775C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2003 |
|
RU2251708C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| РАДИОЛОКАТОР С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО СИГНАЛА | 1993 |
|
RU2060514C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА СРЕДНЕЙ ЧАСТОТОЙ УЗКОПОЛОСНОГО СПЕКТРА СИГНАЛА | 1980 |
|
SU1069536A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2154286C1 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2439609C2 |
| СПОСОБ И УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 2005 |
|
RU2303279C1 |
- -9
)
