Изобретение относится к области гидроакустики и может быть использовано при разработке гидроакустических навигационных систем повышенной точности, работающих при наличии отражающих границ раздела, т.е. при волноводных условиях распространения.
Известна гидроакустическая дальномерная навигационная система, состоящая из М гидроакустических маяков-ответчиков, устанавливаемых в районе работы объекта навигации и размещенных на объекте гидроакустического передатчика, опрашивающего маяки-ответчики на частоте fo, М-канального приемника, принимающего ответы маяков-ответчиков на частотах f1, f2,…, fм, и вычислителя координат объекта навигации (Авторское свидетельство СССР №713278, МПК G01S 15/08, 1978 г.).
В навигационной системе такого типа координаты определяются по набору дистанций, каждая из которых определяется через измеренное время задержки ответа t по формуле r=Ct/2, где С - средняя скорость звука для заданного района работы.
Недостатком такой навигационной системы является большая погрешность определения координат, связанная с непостоянством скорости звука в реальной морской среде, а также с явлением многолучевости распространения звука при наличии отражающих границ раздела.
Известна гидроакустическая навигационная система, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, вход которого соединен с выходом генератора синхроимпульсов, М- канальный приемник, выходы которого подключены к входам М измерителей времени распространения гидроакустических сигналов до приемоответчика, работающего на частоте этого канала и обратно, вторые входы которых соединены с выходом генератора синхроимпульсов, N (по числу видов возможных траекторий лучей в каждом из М каналов) блоков преобразования временных интервалов в дистанции, входы которых подключены к выходу измерителя времени распространения соответствующего канала, и блок выбора максимального значения дистанции, вход которого подключен к выходам N блоков преобразования временных интервалов в дистанции данного канала, а выходы блоков выбора максимального значения дистанции всех М каналов соединены с входами вычислителя координат объекта навигации (Патент РФ №2032187, МПК G01S 15/08, опубл. 27.03.1995 г.).
Включение в навигационную систему N блоков преобразования измеренных временных интервалов в дистанции в каждом из приемных каналов позволяет учесть в рамках какой-либо расчетной модели, например лучевой, как рефракцию лучей, связанную с непостоянством скорости звука, так и многолучевость процесса распространения, связанную с наличием отражающих границ раздела.
Наиболее близкой по технической сущности и достигаемому результату (прототипом) к предлагаемому изобретению является гидроакустическая навигационная система, содержащая навигационную базу, включающую расположенный на береговом посту блок формирования излучаемых сигналов, выходы которого соединены с расположенными на дне симметрично относительно судового хода двумя гидроакустическими излучателями с различными несущими частотами излучаемых сигналов, а также бортовую аппаратуру, включающую приемоусилительный тракт, блок обработки принятых сигналов и индикатор, при этом приемоусилительный тракт содержит два канала усиления, а блок обработки принятых сигналов содержит подключенные к выходам соответствующих усилителей регулируемые линии задержки, выходы которых подключены к входам индикатора (Патент РФ №1840666, МПК G01S 7/52, В63В 49/00, опубл. 27.06.2008 г.).
Недостатком этой навигационной системы является большая погрешность определения координат, связанная с неидентичностью двух разных каналов приема сигналов, а также существенные ограничения по трудоемкости выполнения калибровки.
Техническим результатом изобретения является повышение надежности определения навигационных параметров и уменьшения трудоемкости выполнения калибровки системы.
Технический результат достигается за счет того, что в гидроакустической навигационной системе, содержащей навигационную базу, включающую расположенный на береговом посту блок формирования излучаемых сигналов, выходы которого соединены с расположенными на дне симметрично относительно судового хода двумя гидроакустическими излучателями с различными несущими частотами излучаемых сигналов, а также бортовую аппаратуру, включающую приемоусилительный тракт, блок обработки принятых сигналов и индикатор, приемоусилительный тракт выполнен одноканальным в виде ненаправленного гидрофона с подключенным к его выходу предварительным усилителем, а блок обработки принятых сигналов выполнен в виде подключенных к выходу предварительного усилителя двух полосовых фильтров, настроенных на частоты соответствующих гидроакустических излучателей, мультипликативного смесителя, подключенного к выходам полосовых фильтров, фильтра нижних частот, подключенного к выходу мультипликативного смесителя, частотных фильтров-дискриминаторов, входы которых подключены к выходу фильтра нижних частот, и сумматора, входы которого подключены к выходам частотных фильтров-дискриминаторов, а выход - к входу индикатора.
Сущность предлагаемого способа поясняется чертежом, где на Фиг. 1 представлена блок-схема предлагаемого устройства.
Гидроакустическая навигационная система содержит навигационную базу, включающую расположенный на береговом посту источник питания 1, блок формирования излучаемых сигналов 2, усилители мощности сигналов 3 и 4, выходы которых соединены с расположенными на дне симметрично относительно судового хода двумя гидроакустическими излучателями 5 и 6 с различными несущими частотами излучаемых сигналов, а также бортовую аппаратуру, включающую приемоусилительный тракт, выполненный одноканальным в виде ненаправленного гидрофона 7 с подключенным к его выходу предварительным усилителем 8, и блок обработки принятых сигналов, выполненный в виде подключенных к выходу предварительного усилителя 8 двух полосовых фильтров 9 и 10, настроенных на частоты соответствующих гидроакустических излучателей 5 и 6, мультипликативного смесителя 11, подключенного к выходам полосовых фильтров 9 и 10, фильтра нижних частот 12, подключенного к выходу мультипликативного смесителя 11, трех частотных фильтров-дискриминаторов 13, 14 и 15, входы которых подключены к выходу фильтра нижних частот 12, сумматора 16, входы которого подключены к выходам частотных фильтров-дискриминаторов 13, 14 и 15, и индикатора направления отклонения объекта навигации от судового хода 17, подключенного к выходу сумматора 16.
Предлагаемая навигационная система работает следующим образом.
На береговом посту расположены питаемый источником энергии 1 блок формирования излучающих сигналов 2, который генерирует линейно-частотно-модулированные сигналы с одинаковой длительностью Т посылки и одинаковой базой сигналов β, но с различными несущими частотами, разнесенными на величину не менее чем ширина полосы каждого из сигналов Δω=Δf=βT. Генерируемые сигналы усиливаются усилителями мощности 3 и 4 и образуют непрерывную последовательность без перерывов во времени. Последовательности усиленных сигналов подаются на гидроакустические излучатели 5 и 6, расположенные на дне симметрично относительно судового хода. Излученные сигналы принимаются расположенным на объекте навигации одиночным ненаправленным гидрофоном 7. После предварительного усиления в блоке 8 сигналы выделяются полосовыми фильтрами 9 и 10 и подаются на мультипликативный смеситель 11 и далее на фильтр нижних частот 12 с полосой пропускания 2Δf, который выделяет сигнал разностной частоты ΔΩ, которая может принимать всего четыре различных значения, в зависимости от соотношений времен распространения от гидроакустических излучателей до приемной антенны, а именно

при меньшем времени распространения сигнала с большей несущей частотой, и

при меньшем времени распространения сигнала с меньшей несущей частотой.
Для определения знака и величины дифференциального частотного сдвига 8 выделенный сигнал разностной частоты подается на банк из трех узкополосных частотных фильтров-дискриминаторов 13-15, настроенных на частоты f=0, f=Δω и f=2Δω, соответственно, и осуществляющих предварительную узкополосную фильтрацию сигнала с последующей выработкой сигнала, пропорционального отклонению частоты от центральной частоты фильтра. Сигналы с выходов частотных дискриминаторов 13-15 суммируются сумматором 16, что обеспечивает непрерывное однозначное определение величины и знака искомого дифференциального сдвига частоты 8 во всех четырех указанных комбинациях параметров частотно-разностного сигнала. При использовании в качестве индикатора, например, аналогового стрелочного вольтметра с нулевым средним положением, величина отклонения стрелки будет пропорциональна величине отклонения объекта навигации от судового хода, а направление ее отклонения от нулевого положения будет соответствовать направлению (вправо или влево) отклонения от судового хода, что позволяет своевременно производить коррекцию курса для удержания суда на линии фарватера.
В предлагаемом устройстве применена пассивная система гидроакустической навигации, которая позволяет использовать дифференциально-частотную систему решения задачи определения смещения судна относительно судового хода. При этом прием сигналов на объекте навигации осуществляется на одиночном, ненаправленном гидрофоне, что повышает надежность определения навигационных параметров и уменьшает трудоемкость выполнения калибровки системы.
Определив направление отклонения от судового хода, объект навигации выполняет корректировку курса с целью возвращения на судовой ход. Количество объектов навигации, осуществляющих прием гидроакустических сигналов для определения своего отклонения от судового хода не ограничено. Прием гидроакустических сигналов, их обработка и индикация направления смещения объекта навигации от судового хода осуществляется постоянно и непрерывно в пределах зоны уверенного приема.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Способ формирования и применения глобальной радиогидроакустической системы мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания их источников | 2017 |
|
RU2691294C2 |
| Глобальная радиогидроакустическая система мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания источников их формирования | 2017 |
|
RU2691295C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СИСТЕМА НАВИГАЦИИ СУДОВ | 2022 |
|
RU2795999C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано при разработке гидроакустических навигационных систем повышенной точности, работающих при наличии отражающих границ раздела. Сущность: гидроакустическая навигационная система содержит навигационную базу, включающую расположенный на береговом посту блок формирования излучаемых сигналов, выходы которого соединены с расположенными на дне симметрично относительно судового хода двумя гидроакустическими излучателями с различными несущими частотами излучаемых сигналов, а также бортовую аппаратуру, включающую приемоусилительный тракт, блок обработки принятых сигналов и индикатор, при этом приемоусилительный тракт выполнен одноканальным в виде ненаправленного гидрофона с подключенным к его выходу предварительным усилителем, а блок обработки принятых сигналов выполнен в виде подключенных к выходу предварительного усилителя двух полосовых фильтров, настроенных на частоты соответствующих гидроакустических излучателей, мультипликативного смесителя, подключенного к выходам полосовых фильтров, фильтра нижних частот, подключенного к выходу мультипликативного смесителя, частотных фильтров-дискриминаторов, входы которых подключены к выходу фильтра нижних частот, и сумматора, входы которого подключены к выходам частотных фильтров-дискриминаторов, а выход - к входу индикатора. Техническим результатом изобретения является повышение надежности определения навигационных параметров и уменьшение трудоемкости выполнения калибровки системы. 1 ил.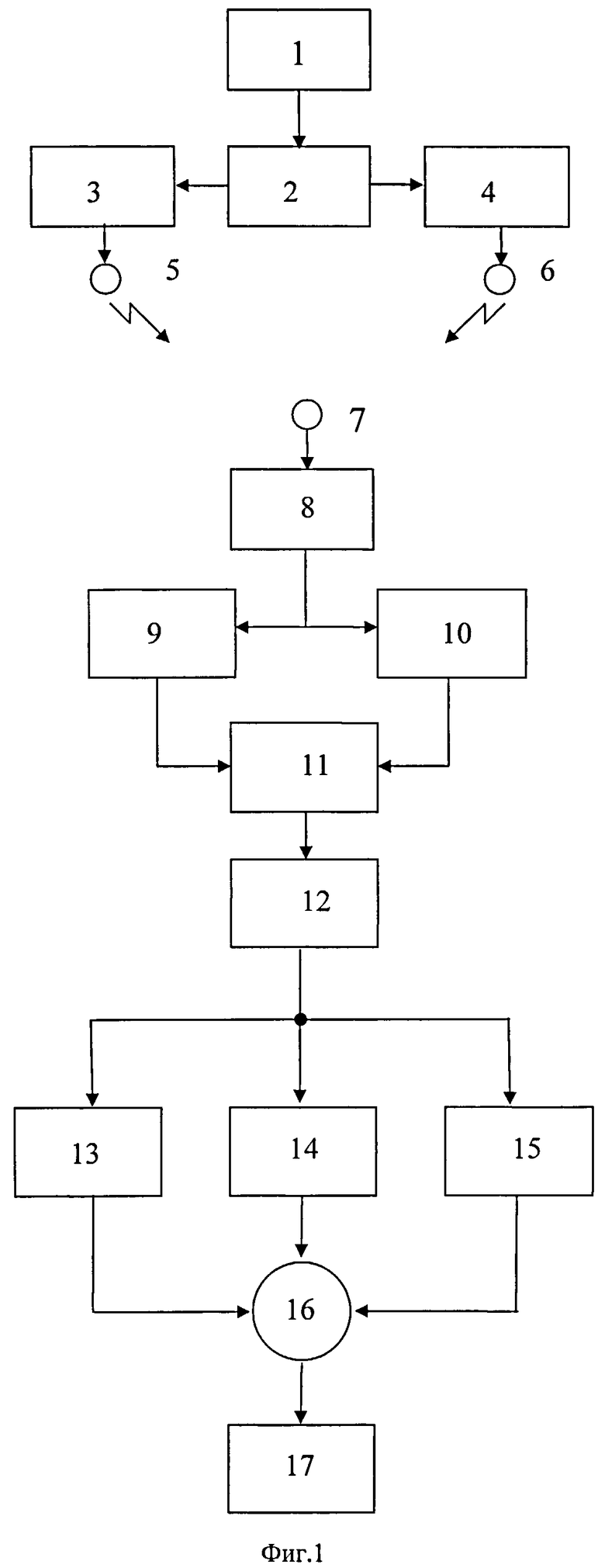
Гидроакустическая навигационная система, содержащая навигационную базу, включающую расположенный на береговом посту блок формирования излучаемых сигналов, выходы которого соединены с расположенными на дне симметрично относительно судового хода двумя гидроакустическими излучателями с различными несущими частотами излучаемых сигналов, а также бортовую аппаратуру, включающую приемоусилительный тракт, блок обработки принятых сигналов и индикатор, отличающаяся тем, что приемоусилительный тракт выполнен одноканальным в виде ненаправленного гидрофона с подключенным к его выходу предварительным усилителем, а блок обработки принятых сигналов выполнен в виде подключенных к выходу предварительного усилителя двух полосовых фильтров, настроенных на частоты соответствующих гидроакустических излучателей, мультипликативного смесителя, подключенного к выходам полосовых фильтров, фильтра нижних частот, подключенного к выходу мультипликативного смесителя, трех частотных фильтров-дискриминаторов, входы которых подключены к выходу фильтра нижних частот, и сумматора, входы которого подключены к выходам частотных фильтров-дискриминаторов, а выход - к входу индикатора.
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
| RU2001123536 A, 10.09.2003 | |||
| Устройство для определения консистенции пульпы | 1956 |
|
SU115929A1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| US 7362653 B2, 22.04.2008 | |||
| US 4024491 A, 17.05.1977 | |||

