Изобретение относится к области электротехники и может быть применена в качестве способа нагружения асинхронного двигателя при его испытании методом взаимной нагрузки.
Аналогом предлагаемого изобретения является устройство для испытаний бесколлекторных электрических машин переменного тока, характеризующееся тем, что содержит испытуемую бесколлекторную электрическую машину, подключенную к выходу статического преобразователя частоты и напряжения, на вход которого подключен источник постоянного тока, ротор испытуемой машины механически соединен с якорем генератора постоянного тока независимого возбуждения, а генератор постоянного тока подключен ко входу статического преобразователя частоты и напряжения, генератор постоянного тока подключен параллельно к источнику постоянного тока ко входу статического преобразователя частоты и напряжения, обмотка независимого возбуждения генератора постоянного тока подключена к выходу выпрямительного устройства возбуждения, а его устройство управления подключено к выходу функционального преобразователя, вход которого подключен к выходу алгебраического сумматора напряжений, а входы алгебраического сумматора напряжений подключены к датчику напряжения источника постоянного тока и датчику напряжения генератора постоянного тока (RU 2001101213 А, 10.02.2003) [1]. Данное устройство для испытаний позволяет достаточно просто измерять мощность и момент, развиваемые испытуемым асинхронным двигателем, по величине тока якоря нагрузочного генератора постоянного тока.
Недостатком приведенного аналога является ручное управление и как следствие возможность перегрузок в схеме в процессе вывода испытуемой машины на режим нагрузки.
Другим аналогом предлагаемого изобретения является стенд для испытания асинхронных машин, состоящий из муфты, механически соединяющей валы двух асинхронных машин, преобразователя частоты со звеном постоянного тока и двумя управляемыми выпрямитель-инверторами, позволяющими передавать электрическую энергию через преобразователь частоты не только от промышленной сети к асинхронному двигателю, но и в обратном направлении; силовой вход первого управляемого выпрямитель-инвертора подключен к сети, а выход к звену постоянного тока, силовой вход второго управляемого выпрямитель-инвертора подключен к тому же звену постоянного тока, а выход подключается к обмотке статора первой асинхронной машины, также характеризующийся тем, что дополнен задатчиком параметров, контактором, вычислителем частоты питающего напряжения, системой управления, датчиком тока, датчиком частоты вращения; выходы системы управления соединены с управляющими входами управляемых выпрямитель-инверторов и управляющим входом контактора, входы системы управления соединены с выходом задатчика параметров, выходом вычислителя частоты питающего напряжения, вход которого соединен с выходом управляемого инвертора; выходом датчика тока, вход которого соединен с выходом управляемого выпрямитель-инвертора, выходом датчика частоты вращения, соединенного с валами асинхронных машин; обмотка статора второй асинхронной машины подключается к сети через контактор (RU 186188 U1, 11.01.2019) [2].
Недостатком приведенного аналога является сложность измерения мощности и момента, развиваемого испытуемым асинхронным двигателем, обусловленная необходимостью использования специальных измерительных систем.
Прототипом предлагаемого изобретения является схема испытания асинхронных электродвигателей методом их взаимной нагрузки, состоящая из двух неуправляемых выпрямителей, получающих питание от трехфазной сети, двух звеньев постоянного тока, электрически связанных между собой, входы которых соединены с выходами неуправляемых выпрямителей, двух однотипных управляемых инверторов, входы которых соединены с выходами звеньев постоянного тока, муфты, механически связывающей между собой испытуемые асинхронные двигатели, получающие питание от управляемых инверторов, содержащая систему управления, выходы которой соединены с входами управляемых инверторов, а входы которой соединены с выходами следующих устройств: двух датчиков тока, входы которых соединены с выходами управляемых инверторов, датчика скорости, соединенного с роторами испытуемых асинхронных двигателей, двух вычислителей частоты питающего напряжения, входы которых соединены с выходами управляемых инверторов, и задатчика параметров сети и испытуемых асинхронных двигателей (RU 163996 U1, 20.08.2016) [3].
Недостатком прототипа является сложность измерения мощности и момента, развиваемого испытуемым асинхронным двигателем, обусловленная необходимостью использования специальных измерительных систем.
Целью предлагаемого изобретения является повышение надежности стенда для испытания асинхронного двигателя за счет исключения возможности перегрузки в процессе нагружения испытуемого двигателя при обеспечении простоты принципа измерения мощности и момента, развиваемого испытуемым асинхронным двигателем, что позволяет отказаться от использования специальных измерительных систем.
Указанная цель достигается тем, что при нагружении асинхронного двигателя при его испытании методом взаимной нагрузки, обеспечивают тормозной момент на валу данного асинхронного двигателя комплексом, состоящим из следующих устройств: неуправляемого выпрямителя, получающего питание от трехфазной сети; звена постоянного тока, вход которого соединен с выходом неуправляемого выпрямителя; управляемого инвертора, вход которого соединен с выходом звена постоянного тока, а выход подключен к обмотке статора асинхронного двигателя, системы управления, выход которой соединен с входом управляемого инвертора, а входы которой соединены с выходами следующих устройств: датчика тока, вход которого соединен с выходом управляемого инвертора, датчика скорости, соединенного с ротором испытуемого асинхронного двигателя, вычислителя частоты питающего напряжения, вход которого соединен с выходом управляемого инвертора, и задатчика параметров сети и испытуемого асинхронного двигателя; оснащают генератором постоянного тока, имеющим обмотку возбуждения и обмотку якоря, вал которого посредством муфты механически связан с валом асинхронного двигателя; контактором, силовые контакты которого подключают обмотку якоря к звену постоянного тока преобразователя частоты, а управляющий вход подключен к выходу системы управления; первым датчиком напряжения, вход которого подключен к звену постоянного тока преобразователя частоты, а выход соединен с входом системы управления; вторым датчиком напряжения, вход которого подключен к обмотке якоря нагрузочного генератора постоянного тока, а выход соединен с входом системы управления; управляемым выпрямителем, силовой вход которого подключен к трехфазной сети, управляющий вход подключен к выходу системы управления, а выход соединен с обмоткой возбуждения генератора постоянного тока; при отключенной обмотке якоря от звена постоянного тока преобразователя частоты и обесточенной обмотке возбуждения с выхода управляемого инвертора на обмотку статора асинхронного двигателя подается переменное напряжение, с постепенным увеличением его частоты от нулевого значения; скорость увеличения частоты переменного напряжения задается системой управления в соответствии с данными, получаемыми от датчика тока, вычислителя частоты питающего напряжения и введенными в задатчик параметров; далее при достижении значения частоты переменного напряжения на выходе управляемого инвертора необходимого значения подается и увеличивается напряжение с управляемого выпрямителя на обмотку возбуждения; далее при достижении напряжения на выходе обмотки якоря значения равного напряжению в звене постоянного тока преобразователя частоты обмотка якоря посредством контактора подключается к звену постоянного тока преобразователя частоты; далее увеличивается ток, подаваемый с выхода управляемого выпрямителя на обмотку возбуждения, что приводит к увеличению нагрузки асинхронного двигателя в двигательном режиме и нагрузочной машины постоянного тока в режиме генератора; скорость увеличения и конечное значение тока, подаваемого с выхода управляемого выпрямителя на обмотку возбуждения, задается системой управления в соответствии с данными, введенными в задатчик параметров и получаемыми от датчиков тока и частоты вращения.
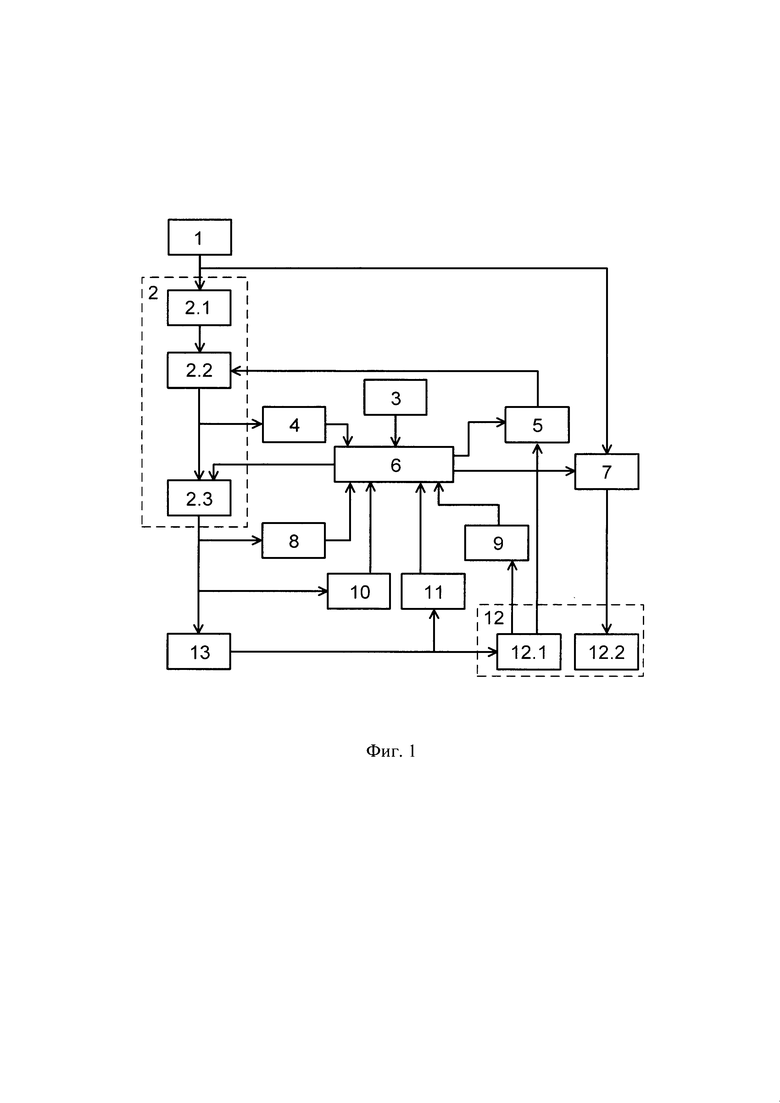
На фиг. 1 представлена схема, отражающая функциональные связи устройств, осуществляющих предлагаемый способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки.
Для реализации предлагаемого способа нагружения асинхронного двигателя при его испытании методом взаимной нагрузки необходим следующий комплекс устройств, состоящий из подключенного к трехфазной сети 1 преобразователя частоты 2, состоящего из неуправляемого выпрямителя 2.1, звена постоянного тока 2.2 и управляемого инвертора 2.3, задатчика параметров сети и испытуемого асинхронного двигателя 3, контактора 5, системы управления 6, управляемого выпрямителя 7, вычислителя частоты напряжения 8, датчиков напряжения 4 и 9, датчика тока 10, датчика частоты вращения 11, генератора постоянного тока 12, содержащего обмотку якоря 12.1 и обмотку возбуждения 12.2, вал которого подсоединен посредством муфты к валу асинхронного двигателя 13.
Вход неуправляемого выпрямителя 2.1 подключен к трехфазной сети 1. Выход неуправляемого выпрямителя 2.1 подключен к входу звена постоянного тока 2.2. Вход управляемого инвертора 2.3 подключен к выходу звена постоянного тока 2.2. Обмотка статора асинхронного двигателя 13 подключена к выходу управляемого инвертора 2.3. Валы асинхронного двигателя 13 и генератора постоянного тока 12 механически соединены между собой муфтой. Выходы системы управления 6, соединены с управляющим входом контактора 5, управляющим входом управляемого выпрямителя 7 и управляющим входом управляемого выпрямитель-инвертора 2.3. Входы системы управления 6 соединены с выходом задатчика параметров сети и испытуемого асинхронного двигателя 3, выходом датчика напряжения 4, вход которого соединен с выходом звена постоянного тока 2.2, выходом датчика напряжения 9, вход которого соединен с выходом обмотки якоря 12.1 генератора постоянного тока 12, выходом датчика тока 10, вход которого соединен с выходом управляемого выпрямитель-инвертора 2.3, выходом датчика частоты вращения 11, соединенного с роторами асинхронного двигателя 13 и генератора постоянного тока 12, выходом вычислителя частоты питающего напряжения 8, вход которого соединен с выходом управляемого инвертора 2.3. Обмотка возбуждения 12.2 генератора постоянного тока 12 подключена к выходу управляемого выпрямителя 7, силовой вход которого подключен к трехфазной сети 1. Обмотка якоря 12.1 генератора постоянного тока 12 подключается к входу звена постоянного тока 2.2 через контактор 5.
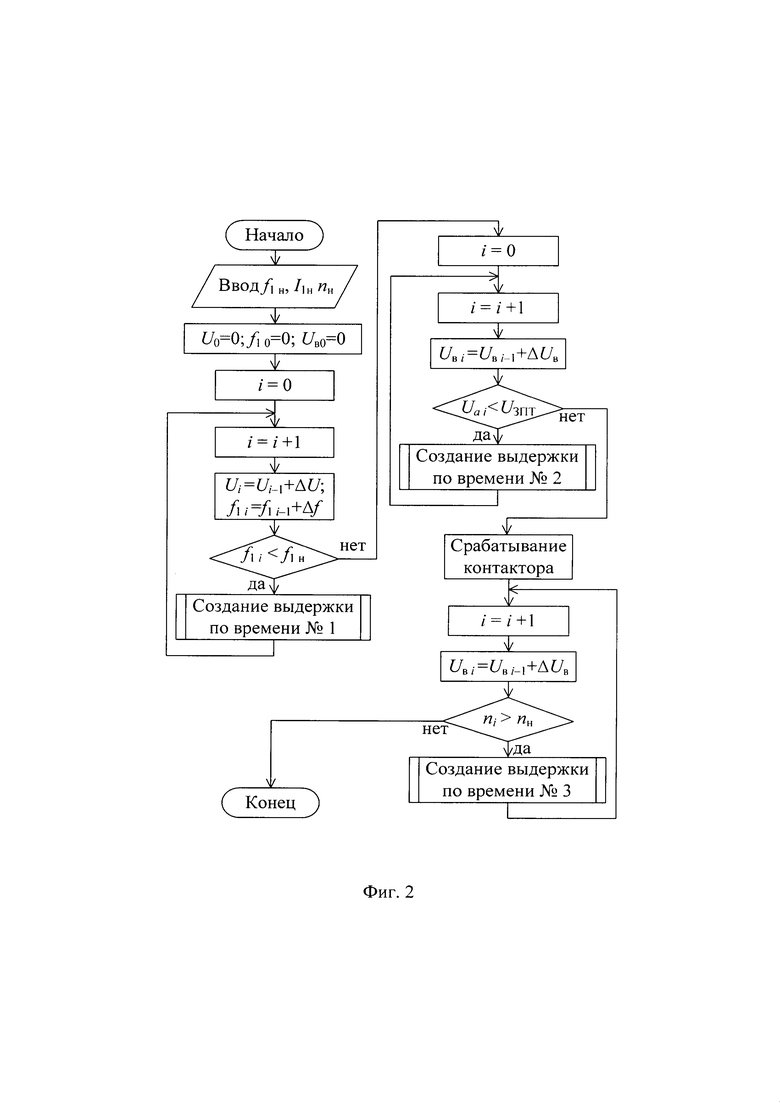
На фиг. 2 представлена блок-схема алгоритма действий, иллюстрирующая предлагаемый способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки.
Предлагаемый способ нагружения асинхронного двигателя при испытании методом взаимной нагрузки осуществляется следующим образом. Подведенное от трехфазной сети 1 напряжение поступает на вход преобразователю частоты 2, где оно преобразуется в постоянное напряжение посредством выпрямителя 2.1, передается в звено постоянного тока 2.2 и далее инвертируется с помощью управляемого инвертора 2.3 в переменное напряжение, имеющее требуемое действующее значение и частоту. Обмотка возбуждения генератора постоянного тока 12.2 получает питание от управляемого выпрямителя 7 и создает магнитное поле, величина магнитного потока которого регулируется путем подачи соответствующего управляющего сигнала на управляемый выпрямитель 7 от системы управления 6.
Процесс нагружения асинхронного двигателя осуществляется за счет следующих действий. Стенд начинает работу при отключенной обмотке якоря 12.1 от звена постоянного тока 2.2 преобразователя частоты 2 и обесточенной обмотке возбуждения 12.2. Оператором вводится в задатчик параметров сети и испытуемого асинхронного двигателя 3 расчетная частота питающего асинхронный двигатель напряжения ƒ1н, а также значения следующих номинальных величин асинхронного двигателя 13: тока статора I1н и частоты вращения nн.
Далее с выхода управляемого инвертора 2.3 на обмотку статора асинхронного двигателя 13 подается переменное напряжение, с постепенным увеличением его частоты ƒ1 от нулевого значения. Скорость увеличения частоты ƒ1 задается системой управления 6 в соответствии с данными, получаемыми от датчика тока 10, вычислителя частоты питающего напряжения 8 и введенными в задатчик параметров сети и испытуемого асинхронного двигателя 3. Датчик тока 10 позволяет осуществить обратную связь по току статора I1 асинхронного двигателя 13, и тем самым позволяет осуществить его пуск с заданным значением тока I1, незначительно превышающим значение I1н за счет того, что значение частоты ƒ1 контролируется системой управления 6 с помощью вычислителя частоты питающего напряжения 8 и увеличивается до значения ƒ1н с необходимым шагом Δƒ одновременно с действующим значением напряжения U1, которое увеличивается с шагом ΔU, например, по известному закону U/ƒ=const. Величина выдержки по времени №1 на каждом шаге определяются системой управления исходя из того, чтобы значение тока I1, незначительно превышало значение I1н.
Далее при достижении частотой ƒ1 значения равного ƒ1н, увеличивается напряжение Uв, подаваемое с управляемого выпрямителя 7 на обмотку возбуждения 12.2 с шагом ΔUв и выдержкой по времени №2 на каждом шаге необходимой для того, чтобы обеспечить приемлемый (порядка единиц секунды) отрезок времени, за который напряжение на выходе обмотки якоря 12.1, равное электродвижущей силе якоря Еа, достигнет значения равного напряжению в звене постоянного тока преобразователя частоты UЗПТ.
Далее при достижении электродвижущей силы обмотки якоря 12.1 Еа, регистрируемой при помощи датчика напряжения 9, значения равного напряжению UЗПТ, регистрируемого при помощи датчика напряжения 4, в звене постоянного тока 2.2 преобразователя частоты 2 обмотка якоря 12.1 посредством контактора 5 подключается к звену постоянного тока 2.2 преобразователя частоты 2.
Далее увеличивается напряжение Uв и, следовательно, ток Iв, что приводит к неравенству Еа>UЗПТ и, как следствие, увеличению нагрузки генератора постоянного тока 12 и асинхронного двигателя 13. Скорость увеличения и конечное значение тока Iв задается системой управления 6 в соответствии с данными, введенными в задатчик параметров сети и испытуемого асинхронного двигателя 3, а также получаемыми от датчиков тока 10 и частоты вращения 11. Исходя из этих данных формируется шаг напряжения ΔUв и выдержка по времени №3. Датчик тока 10 позволяет осуществить обратную связь по току статора I1 асинхронного двигателя 13, и тем самым позволяет осуществить процесс его нагружения с заданным значением тока I1, незначительно превышающим значение I1н.
Датчик частоты вращения 11 позволяет системе управления 6 определить достижение частотой вращения ротора асинхронного двигателя n значения nн, что означает достижение режима работы с номинальным скольжением и номинальной нагрузкой.
Таким образом, предложенное изобретение позволяет повысить надежность процесса испытания асинхронного двигателя методом взаимной нагрузки за счет исключения возможности перегрузки в процессе нагружения при обеспечении простоты принципа измерения мощности и момента, развиваемого испытуемым асинхронным двигателем, что позволяет отказаться от использования специальных измерительных систем.
Источники информации:
1. Патент на изобретение Р.Ф. №2001101213, МПК G01R 31/34, 2003.
2. Патент на полезную модель Р.Ф. №186188, МПК G01R 31/34, H01K 15/02 2018.
3. Патент на полезную модель Р.Ф. №163996, МПК G01R 31/34, 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания асинхронных машин и способ их нагружения | 2018 |
|
RU2691778C1 |
| Способ испытания асинхронных двигателей методом взаимной нагрузки | 2019 |
|
RU2706449C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ИСПЫТАНИЯ СИЛОВЫХ ПЕРЕДАЧ | 2013 |
|
RU2554339C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| СУДОВАЯ ПРОПУЛЬСИВНАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2543110C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2493047C1 |
Изобретение относится к области электротехники и может быть применено в качестве способа нагружения асинхронного двигателя при его испытании методом взаимной нагрузки. Технический результат при реализации заявленного способа нагружения асинхронного двигателя - повышение надежности стенда за счет исключения возможности перегрузки испытуемой и нагрузочной машины в процессе нагружения. 2 ил. 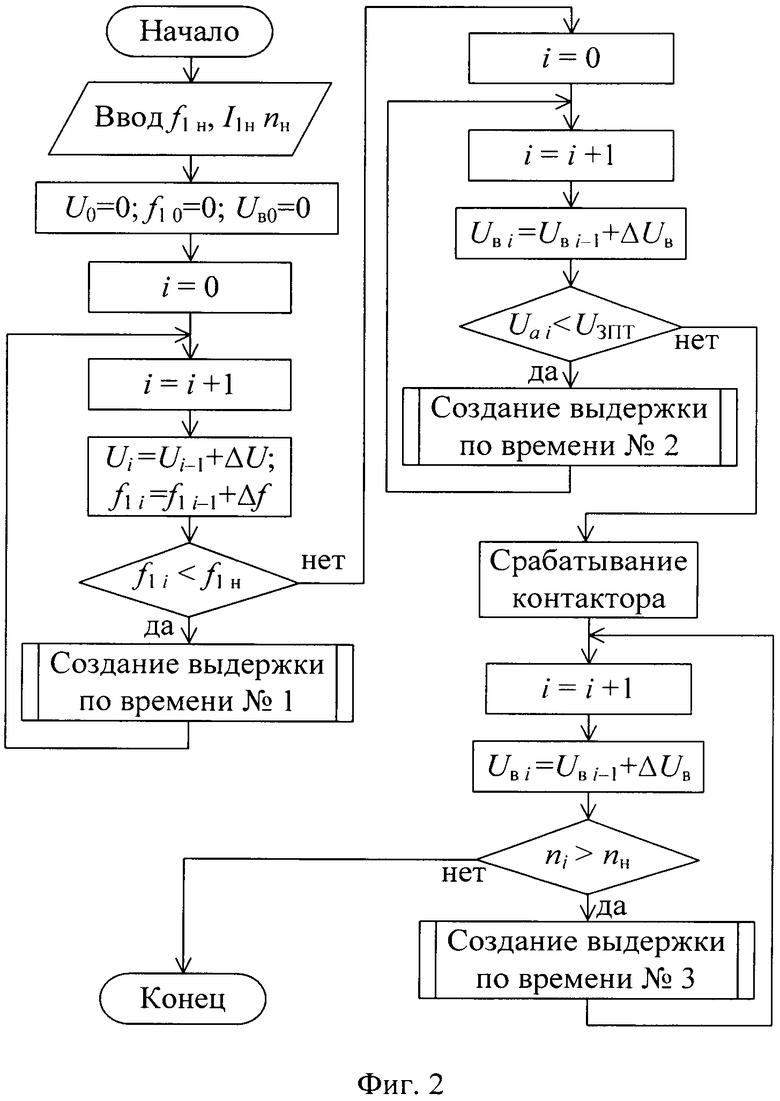
Способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки, включающий обеспечение тормозного момента на валу данного асинхронного двигателя комплексом, состоящим из следующих устройств: неуправляемого выпрямителя, получающего питание от трехфазной сети; звена постоянного тока, вход которого соединен с выходом неуправляемого выпрямителя; управляемого инвертора, вход которого соединен с выходом звена постоянного тока, а выход подключен к обмотке статора асинхронного двигателя; системы управления, выход которой соединен с входом управляемого инвертора, а входы которой соединены с выходами следующих устройств: датчика тока, вход которого соединен с выходом управляемого инвертора, датчика скорости, соединенного с ротором испытуемого асинхронного двигателя, вычислителя частоты питающего напряжения, вход которого соединен с выходом управляемого инвертора, и задатчика параметров сети и испытуемого асинхронного двигателя; отличающийся тем, что комплекс устройств, обеспечивающих тормозной момент на валу асинхронного двигателя дополнен генератором постоянного тока, имеющим обмотку возбуждения и обмотку якоря, вал которого посредством муфты механически связан с валом асинхронного двигателя; контактором, силовые контакты которого подключают обмотку якоря к звену постоянного тока преобразователя частоты, а управляющий вход подключен к выходу системы управления; первым датчиком напряжения, вход которого подключен к звену постоянного тока преобразователя частоты, а выход соединен с входом системы управления; вторым датчиком напряжения, вход которого подключен к обмотке якоря нагрузочного генератора постоянного тока, а выход соединен с входом системы управления; управляемым выпрямителем, силовой вход которого подключен к трехфазной сети, управляющий вход подключен к выходу системы управления, а выход соединен с обмоткой возбуждения генератора постоянного тока; при отключенной обмотке якоря от звена постоянного тока преобразователя частоты и обесточенной обмотке возбуждения с выхода управляемого инвертора на обмотку статора асинхронного двигателя подается переменное напряжение, с постепенным увеличением его частоты от нулевого значения; скорость увеличения частоты переменного напряжения задается системой управления в соответствии с данными, получаемыми от датчика тока, вычислителя частоты питающего напряжения и введенными в задатчик параметров сети и испытуемого асинхронного двигателя; далее при достижении значения частоты переменного напряжения на выходе управляемого инвертора необходимого значения подается и увеличивается напряжение с управляемого выпрямителя на обмотку возбуждения; далее при достижении напряжения на выходе обмотки якоря значения, равного напряжению в звене постоянного тока преобразователя частоты, обмотка якоря посредством контактора подключается к звену постоянного тока преобразователя частоты; далее увеличивается ток, подаваемый с выхода управляемого выпрямителя на обмотку возбуждения, что приводит к увеличению нагрузки асинхронного двигателя в двигательном режиме и нагрузочной машины постоянного тока в режиме генератора; скорость увеличения и конечное значение тока, подаваемого с выхода управляемого выпрямителя на обмотку возбуждения, задается системой управления в соответствии с данными, введенными в задатчик параметров сети и испытуемого асинхронного двигателя и получаемыми от датчиков тока и частоты вращения.
| УСТАНОВОЧНОЕ УСТРОЙСТВО ДЛЯ БУРИЛЬНЫХ МАШИН С | 0 |
|
SU163996A1 |
| Стенд для снятия динамических характеристик электрических машин | 1990 |
|
SU1780064A1 |
| Способ получения высокоглиноземистого огнеупора на нитридной связке "нунулита" | 1959 |
|
SU143346A1 |
| Статья: "МЕТОДИКА ОПРЕДЕЛЕНИЯ МОЩНОСТИ И МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ ПРИ ИСПЫТАНИИ АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ МЕТОДОМ ВЗАИМНОЙ НАГРУЗКИ", Вестник Сибирской государственной автомобильно-дорожной академии, 2014 | |||
| Диссертация: "Искусственное | |||

