I
Изобретение относится к машиностроению и может быть использовано в станках, управление движением рабочих органов которых осуществляется от копировальной машины.
По основному авт. св. N 582947 известно устройство для управления копировальным станком, которое содержит первый привод, подключенный к исполнительному органу станка и последовательно саединет1ые копир, датчик копирования второй следящий привод и датчик положения копира. Устройство содержит также последовательно соединенные сумматор, подключенный к датчику положения копира и датчику ошибки копирования, блок определения и сравне1шя ускорений и блок регулируемой задержки, управляющий вход и выход которого подключены соответственно к выходу c}TviMaTOpa и первому исполнительному приводу.
Копир, датчик ошибки копирования, следящий привод и датчик положения копира входят в состав копировальной машины.
Копировальная машина и исполнительный станок связаны междУ собой датчика ми для
согласования положения исполтштельных органов станка. В качестве датчиков мотуг быть использованы импульсные датчики переккшений или аналоговые циклические типа индуктосин.
в отличие от импульсных датчиков перемещений циклические датчики п(шторяют информацию о перемещении каждый 191кя, обеспеч1шая тем самым высокую надежность воспроизведения геометрических размеров детали,
to т.е. высокую надежность передачи упраЛляюшей информации с копировальной маишны на исполнительный станок (1).
Однако в этом устройстве, позволяющем с высокой точностью обрабатывать изломы
15 профиля деталей с учетом динамики станка не предусмотрено масштабирование геометрических размеров деталей по одному шаблону в сторону увеличения или уменьшения их раэмеров.
20
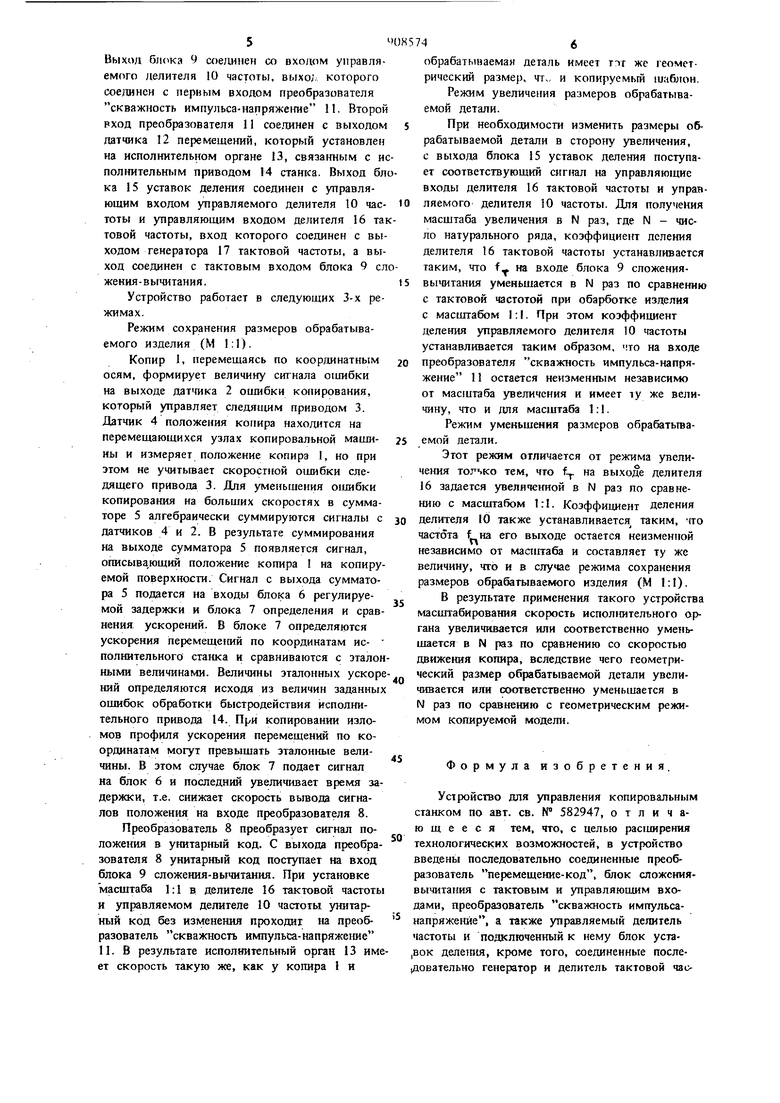
Цель изобрете1дая - расширение технологических возможностей устройства, а именно, масштабирование геометрических размер ж детали по одному шаблону при одинаковых 390 p« i iepax копировального пальца и фрезы при использовагти аналоговых 1шклических датвдков перемещений типа индуктосии на копировальной машине н иснолнителъном станке, Поставлеш1ая цель достигается тем, irro в .устройство введены последовательно соеди ненные преобразователь перемещение-код, блок сложения-вычитания с тактовым и утграв ляющнм входами, управляемый делитель частоты и преобразователь скважность импульсанапряжение, а также управляемый делитель частоты и под1слюченный к нему блок уставок деления, и кроме того, соединенные последовательно генератор и делитель тактовой частоты, выход которого соединен с тактовым входом блока сложе1гая.пычитания, а управля10Щ1ш вход - с выходом блока уставок де ления, при этом преобразователь перемещение-код подключен к блоку регулируемой задержки, выход преобразователя скважность импульса-напряжение соединен со входом исполнительного привода а второй вход згого преобразователя через датчик перемещения связан с исполнительным органом. Это позволяет при сохранении высокой точности работы устройства расширить его технологические возможности: изменять геоме рические размеры детали по отноше1шго к шабло11у, т.е. вводить масштабирование при использовании аналоговых циклических датчиков, имеющих высокую надежность по отношению к импульсным датшкам, так как они возобновляют информацию каждый цикл, а частота питания датчиков существенно выще частоты передачи управляющей информации, При этом масштабирование обеспечивается без изменения частоты питания датчиков перемещений на копировальной машине и испол1Штельном станке. Введение в устройство делителя тактовой частоты и управляемого делителя частоты пр неизменной частоте питания датчика изменяет цену дискреты импульса которая определяетс шагом датчика и отношением частоты тактиро вания к частоте питания датчика. Например при масштабе (М) 1:1, шаге датчика м частоте питания датчика f р 2 кГц, тактовой частоте f.. 1000 кГц, имеет коэффици ент деления управляемого делителя , 1000 . 500 ..дел. t 2 кГц тогля цена дискреты импульса испошттельного устройства будет 2 мм д . 500 импуль Vnp.APA при згом ко:эффипиент деления тактовой частоты равен 100000 Klji г 14 дел та кг f.r 1000 кГц В случае уменьшения масштаба, например М 1:10, при fn 2 кГц, f 100000 кГц, 8 2 мм, имеет f t 100000. . joooo гц, делтап 0 где Кдрд-у.д|. 10 и определяется коэффициентом J,.pдтaкт РЧ М : и величиной М -10 Аел.такт. 100:10 10, тогда 10000 кГц 5000 дел.такт, f Т кТц а цена дискреты импульса будет Д S LjyM импульс . в случае увеличения масштаба, например М 10:1, при f - 2 кГц, f 1000 кГц, мм, имеем ШОООО к1ж 1оОкГц, 1000 , 1000, тогда Лел.тсккт, V 100 кГц СП Упр.дел, fn 2 кГц а цена дискреты импульса будет импульс прдел Так как при копировании модели на копировальной маишне и непосредственной обработке детали на исполнительном станке, особенно в режиме увеличенного масщтаба, увеличивается скорость исполнительного органа, то необходимо иметь устройство, учитьшающее диналвдку станка. На чертеже показана структурная схема устройства для управления копировальным станком. Устройство содержит копир 1, датчик 2 ошибки копирования, следяший привод 3, датчик 4 положения копира. Выходы датчиков 2 и 4 соединены со входом сумматора 5. Выход сумматора 5 подключен к управляющему входу блока 6 регулируемой задержки и входу блока 7 определения и сравнения ускорений. Выход блока 7 подсоединен к регулирующему входу блока 6 регугаруемой задержки, выход которого соединен со входом преобразователя перемещение-код 8, выход последнего соединен со входом блока 9 сложения-вычитатшя. 5 Выход бш-Кя 9 соединен со входом управляемого делителя 10 частоты, выхо/. которого с первым входом преобразователя скважность импульса-напряжете 11. Второй вход преобразователя 11 соединен с выходом датчика 12 перемещений, который установлен на исполнительном органе 13, связанным с ис полнительным приводом 14 станка. Выход бл ка 15 уставок деления соединен с управляющим входом управляемого делителя 10 частоты и управляющим входом делителя 16 так товой частоты, вход которого соединен с выходом генератора 17 тактовой частоты, а выход соединен с тактовым входом блока 9 сл жения-вычитания. Устройство работает в следующих 3-х режимах. Режим сохранения размеров обрабатываемого изделия (М 1:1). Копир 1, перемещаясь по координатным осям, формирует величину сигнала ошибки на выходе датчика 2 ошибки копирования, который управляет следящим приводом 3. Датчик 4 положения копира находится на перемещающихся узлах копировальной мащины и измеряет положение копира 1, но при этом не учитывает скоростной ошибки следящ.его привода 3. .Для уменьшения ошибки копирования на больших скоростях в сумматоре 5 алгебраически суммируются сигналы с датчиков 4 и 2. В результате суммирования на выходе сумматора 5 появляется сигнал, описыва,ющий положение копира 1 на копируемой поверхности. Сигнал с выхода сумматора 5 подается на входы блока 6 регулируемой задержки и блока 7 определения и сравнения ускорений. В блоке 7 определяются ускорения перемеще1шй по координатам исполнительного станка и сравниваются с эталон ными величинами. Величины эталонных ускор ний определяются исходя из величин заданных ошибок обработки быстродействия исполнительного привода 14. При копировании изломов профиля ускорения перемещений по координатам могут превышать эталонные величины. В этом случае блок 7 подает сигнал на блок 6 и последний }веяичивает время задержки, т.е. снижает скорость вывода сигналов положения на входе преобразователя 8. Преобразователь 8 преобразует сигнал положе1шя в унитарный код, С выхода преобразователя 8 унитарный код поступает на вход блока 9 сложения-вычитания. При установке масштаба 1:1 в делителе 16 тактовой частоты и управляемом делителе 10 частоты унитарный код без изменения проходих {и преобразователь скважность импульса-напряже1ше 11. В результате исполт1тепьный орган 13 им ет скорость такую же, как у копира 1 и 4 обрабатываемая деталь имеет пт же геометрический размер, ,, и копируемый luaSjioH. Режим увеличения размеров обрабатываемой детали. При необходимости изменить размеры обрабатываемой детали в сторотгу увеличения, с выхода блока 15 уставок деления поступает соответствующий сигггал на управляющие входы делителя 16 тактовой частоты и управляемого делителя 10 частоты. Для получения масштаба увеличения в N раз, где N - число натурального ряда, коэффициент деления делителя 16 тактовой частоты устанавливается таким, что f на входе блока 9 сложениявычитания уменьшается в N раз по сравнению с тактовой частотой при обарботке изделия с масштабом Г.. При этом коэффиш ент деления управляемого делителя 10 частоты устанавливается таким образом, что на входе преобразователя скважность импульса-напряжение 11 остается неизменным независимо от масштаба увеличения и имеет iy же величину, что и для масштаба 1:1. Режим уменьшения размеров обрабатьгеаемой детали. Этот режим отличается от режима увеличения TOJSKo тем, что f-. на выходе делителя 16 задается увеличе1гаой в N раз по сравнению с масштабом 1:1. Коэффиш ент деления делителя 10 также устанавливается таким, что частота 1,на его выходе остается неизменной независимо от масштаба и составляет ту же величину, что и в случае режима сохранения размеров обрабатываемого изделия (М 1:1). В результате применения такого устройства масштабирования скорость исполнительного органа увеличивается или соответственно уменьается в N раз по сравнению со скоростью вижения копира, вследствие чего геометрический размер обрабатываемой детали увеличивается или соответственно уменьшается в N раз по сравнению с геометрическнм режимом копируемой модели. Формула изобретения. Устройство для управления копировальным станком по авт. ев, № 582947, отличающееся тем, что, с целью расширения технологических возможностей, в устройство введены последовательно соединенные преобразователь перемещение-код, блок сложениявычитаггия с тактовым и управляющим входами, преобразователь скважность импульсанапряже1ше, а также управляемый делитель частоты и подключенный к нему блок уста|Вок делетям, кроме того, соединенные последовательно генератор и делитель тактовой частоты, выход которого соединен с тактовым входом блока сяожения-вычтания, а управляюишй вход - с выходом блока уставок деления, при этом преобразователь перемещение-код подключен к блоку регулируемой задержки, выход преобразователя скважность импульса-напряжение соединен со входом нсполни908 тельного привода, а второй вход этого преобразователя через датчик перемещения связан с нсполнительга 1м органом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 582947, кл. В 23 Q 35/04, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2019032C1 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Копировальное следящее устройство для управления станком | 1987 |
|
SU1411705A2 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| Устройство для формирования программы управления обработкой детали | 1979 |
|
SU773572A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| И. М. Э. Г. Моторов, А. С. Федотов, А. М. Федоров, А. С. Еи Г. Н. Петров | 1970 |
|
SU259606A1 |
| Копировальная система | 1979 |
|
SU841916A1 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
-
W
VV
lf
rs
5П
12,
1i
