§.123
Изобретение относится к области станкостроения и робототехники и может быть использовано при управлении электроприводами роботов и станков с числовым программным управле- кием.
Целью изобретения является повышение точности системы.
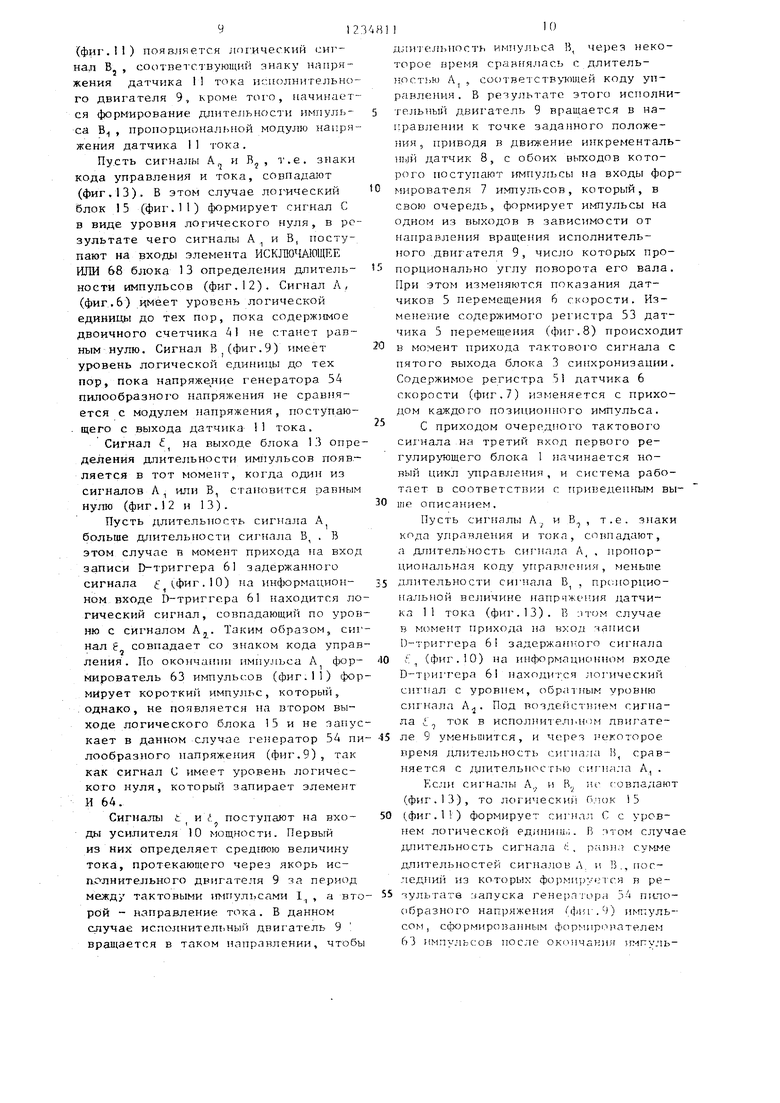
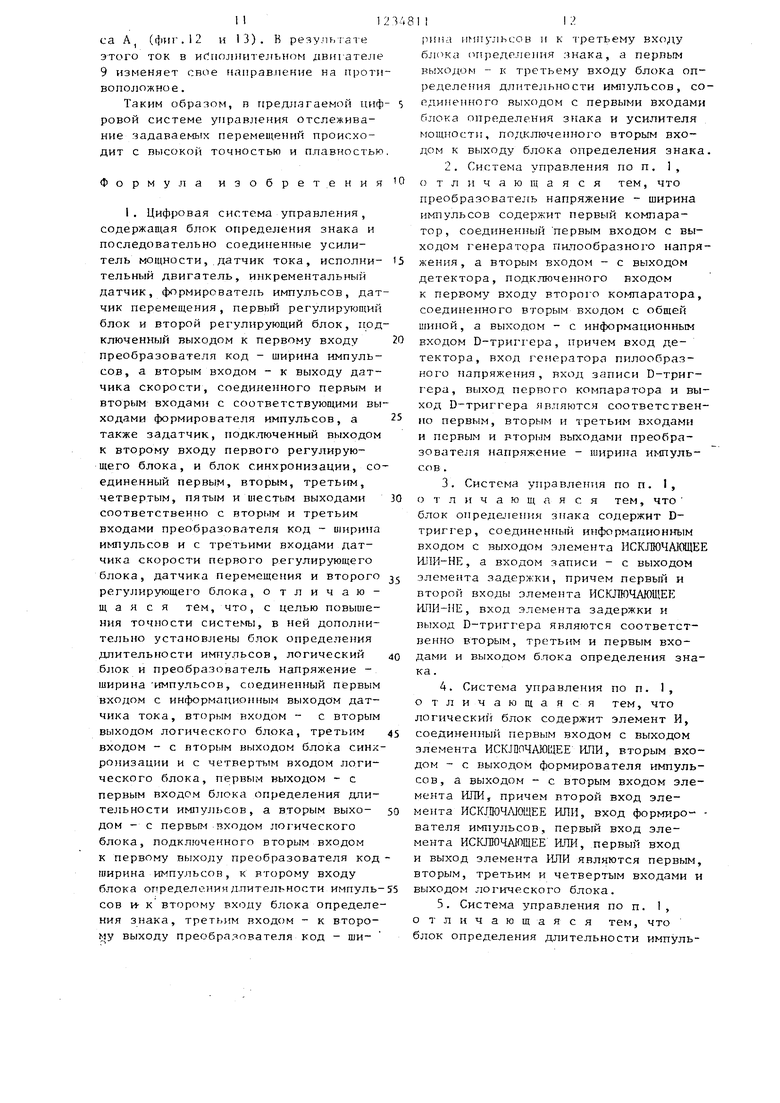
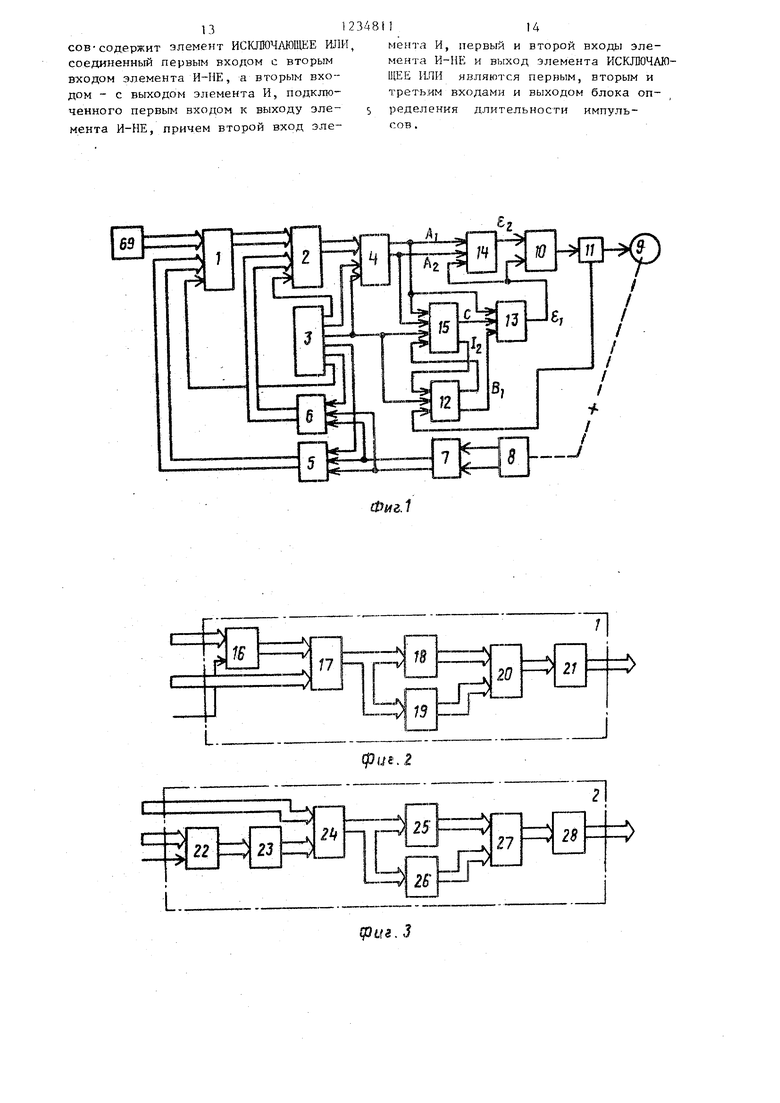
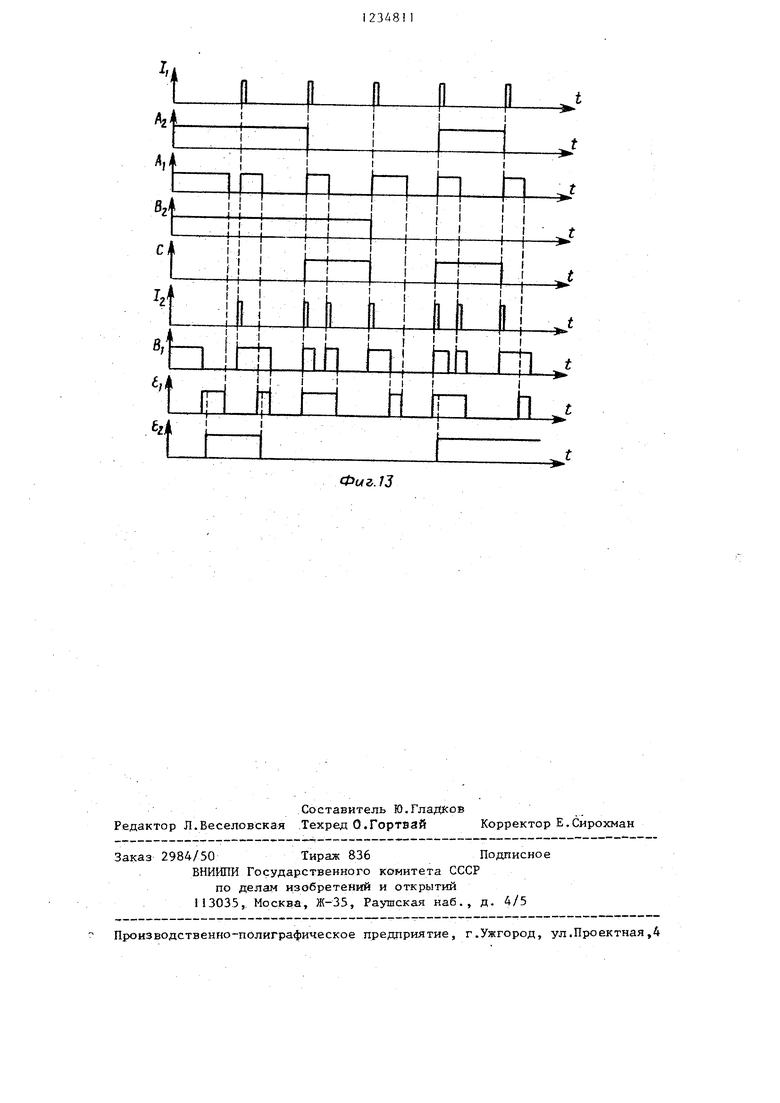
На фиг.1 приведена функциональная схема cиcтe ы; на фиг.2 - функци т ональная схема первого регулирующего блока; на фиг.З - функциональная схема второго регулирующего блока; на фиг.4 - то же, вариант исполнения; на фиг.З - функциональная схема блока синхронизации; на фиг.6 - функциональная схема преобразователя код - ширина импульсов; на фиг,7 - функциональная схема датчикаскорости; на фиг.8 - функциональная схема дат- чика перемещения; на фиг.9 - функциональная схема преобразователя напряжение - ширина импульсов; на фиг.10- функциональная схема блока определения знака; на фиг.II - функциональная схема логического блока; на фиг.12- функциональная схема блока определения длительности импульсов; на фиг.13 - временные диаграммы, поясняющие работу системы;
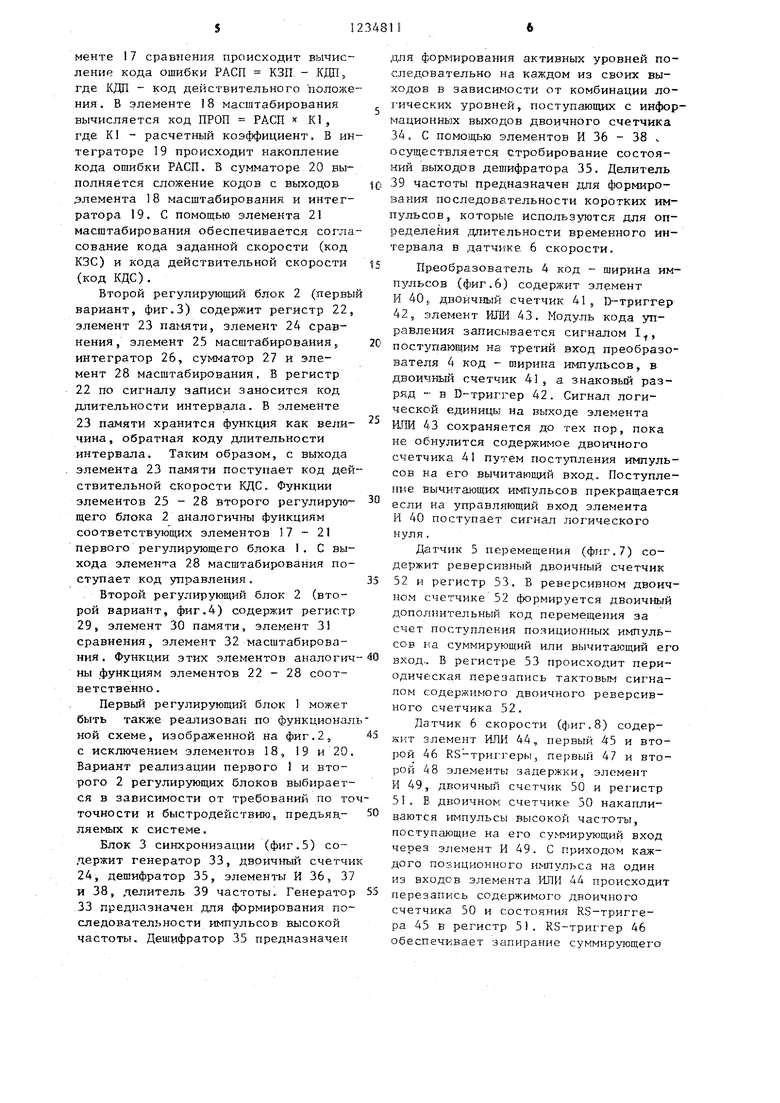
Система содержит первый 1 и второй 2 регулирующие блоки, блок 3 синхронизации, преобразователь 4 код- ширина и шульсов, датчик 5 перемещения, датчик 6 скорости,.формирователь 7 импульсов, инкрементальнъ Й датчик 8, исполнительный двигатель 9, . усилитель 10 мощности, датчик 11 тока, преобразователе i2 напряжение - ширина импульсов, блок 13 определения длительности импульсов, блок 14 определения знака, логически блок 15, регистр 16, элемент 17 сравнения, элемент 18 масштабирования, интегратор 19, сумматор 20,, элемент 21 масштабирования, регистр 22, элемент 23 памяти, элемент 24 сравнения, элемент 25 масштабирования, интегратор 26, сумматор 27, элемент 28 масштабирования, регистр 2,9, элемент 30 памя- ти, элемент 31 сравнения, элемент 32 масштабирования, генера тор 33 импульсов, двоичный счетчик 34, дешифратор 33, элементы К 36-38, делитель 39 частоты, элемент И 40, двоичный счет- чик 4, D-триггер 42, элементы ИЛИ 43 и 44, RS-триггеры 43 и 46, элементы 47 и 4.8 задержки, элемент И 49
5
81
0 3 ®
35 40 - 55
0
11
двоичный счетчик 50, регистр 51, реверсивный двоичный счетчик 52, регистр 53, генератор 54 пилообразного напряжения, первый 55 и второй 56 компараторы, D-триггер 57, детектор 58, элемент ИСКЛЮЧАЮЩЕЕ ИПИ 59, элемент задержки 60, D-триггер 61, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 62, формирователь 63 импульсов, элемент И 64, элемент ИЛИ 65, элемент И-НЕ 66, элемент И 67, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 68, задатчик 69.
На фиг.1-13 приняты следующие обозначения: А , А сигналы на первом и втором: вь ходах преобразователя 4 код - ширина импульсов; В, В - сигналы на первом и втором вькодах преобразователя 12 напряжение - ширина импульсов; с - выходной сигнал блока 14 определения знака; С, 1 сигналы на первом и втором выходах , логического блока 15; - выходной сигнал блока 13 определения длительности импульсов; I., - сигнал на втором выходе, блока 3 синхронизации.
Первый регулирующий блок предназначен для расчета кода заданной / скорости на основе кода заданного пе- ремещеция, поступающего с выхода за- датчика 69 на его первый вход по тактовому сигналу на его третьем входе, и кода действительного перемещения гюступакацего на BTopofi вход с выхода датчика 3 перемещения. Второй регулирующий блок 2 предназначен для расчета кода управления на основе кода заданной скорости, поступающего на его первый вход, и кода действительной скорости, поступающего на второй его вход с выхода датчика 6 скорости по тактовому сигналу на его третьем входе.
Первый 1 и второй 2 регулирующий блоки обеспечивают необходимые показатели точности и быстродействия .
Блок 3 синхронизации предназначен для формирования последовательностей сигналов, синхронизирующих работу системы, С первого выхода блока 3 синхронизации поступает опорная частота для формирования длительности широтно-модулированных импульсов А в преобразователе 4 код - ширина импульсов. С второго выхода блока 3 синхронизации поступает пос;тедова- телькость импульсов 1. , задающая частоту широтно-модулированных им
3,1
пупьсоп л I и. частоту импульсов В на выходе преобразователя 2 напряжение ширина импульсов. С третьего выхода блока 3 синхронизации поступает последовательность импульсов для фор мирования в датчике 6 скорости кода, пропорционального временному интервалу между позиционными импульсами, С четвертого выхода блока 3 синх ронизации поступает последовательность импульсов, по которым проис- ходит запись новых значений кодов за данного перемещения в первый регулирующий блок I, С пятого выхода блока 3 синхронизации поступает последовательность импупьсов, по которым осуществляется изменение показаний датчика 5 перемещения. С шестого выхода блока 3 синхронизации поступает последовательность импульсов, по которым осуществляется запись кодов с выхода датчика 6 скорости во второй регулирующий блок 2.
Преобразователь 4 код - ширина им пульсов преобразует поступающие на его первый вход параллельные коды управления в цоследовательность импульсов А, длительность которых пропорциональна модулю кодов управления а частота задается синхроимпульсами по третьему входу. С первого выхода данного блока поступают широтно-мо- дулированные импульсы Л , а со второ I O .выхода - знак кода управления А, .
Датчик 5 перемещения предназначен для формирования параллельного двоичного кодаj включающего модуль и знак характеризующего действительное положение вала исполнительного двигателя 9.
Датчик 6 скорости предназначен для формирования двоичного параллельного кода, включающего знак и модуль, пропорционального временному интер- валу между двумя соседними позицион- HbD-iH 11мпульсами. Знак указывает на направление вращения вала исполнительного двигателя 9.
Формирователь 7 импульсов предна- значен для учетверения числа импуль- сов и распределения их по одному из двух каналов в зависимости от сдвига по фазе ИМПУЛЬСОВ, поступающих с инкрементального датчика 8.
Инкрементальный датчик 8 предназначен для формирования двух после- ловательностей и fflyльcoв с разностью
0
s ла Е,
фаз 90 в зависимости от направлешш вращения его вала.
Усилитель 10 мощности, нагрузкой которого служит цепь исполнительного двигателя 9, обеспечивает необходимое усиление по мощности импульсов {, , . поступающих на его первый вход, а также изменение полярности подводимого к идполнительному двигателю 9 напряжения в зависимости от сигна- поступающего на его второй
5
s ла Е,
5 О
0
5
0
5 05
вход. Усилитель 10 мощности может быть выполнен на транзисторах по мостовой схеме.
Датчик 1. тока формирует на выходе постоянное напряжение, пропорциональное величине тока, протекающего по цепи якоря исполнительного двигателя 9. В качестве датчика 11 тока. может быть использован резистор соот ветствующей мощности.
Преобразователь 12 напряжение - ширина импульсов формирует на первом выходе импульсы В , длительность которых пропорциональна напряжению на его перво.м входе, а частота задается импульсами 1, поступающими на его второй вход, а на втором выходе - сигналы В логического уровня в соответствии с полярностью входного напряжения . Изменение сигнала В может происходить в момент пр1гх:ода синхрои.тульсов I, на первый вход преобразователя 12 напряжение - ширина импульсов.
Блок 13 определения длительности импульсов производит сложение или вычитание длительностей импульсов А г и Bj, , поступающих на его первый и третий входь, в зависимости от сигнала С, поступающех о на его третий вход.
Блок 1А опреде гения знака выраба- тывает сигнал логического уровня, который управляет работой усилителя 10 мощности, задавая этим самым направление вращения исполнительного двигателя 9, в зависимости от комбинации сигналов А и А на втором и третьем его входах.
Первый регулирующий блок 1 (фиг.2} содержит регистр 16, элемент 17 срав нения, элемент 18 масштабирования, интегратор 19, сумматор 20 и элемент 21 масштабирования. В регистр 16 по сигналу записи заносится код за- . данного перемещения (код КЗП). В эле
менте 17 сравнения происходит вычисление кода ошибки РАСП КЗП. - КДП, где КДП - код действительного положения . В элементе 8 масштабирования вычисляется код ПРОП РАСП К1, где К - расчетный коэффициент. В интеграторе 19 происходит накопление кода ошибки РАСП. В сумматоре 20 выполняется сложение кодов с выходов злемента 18 масштабирования и интегратора 19. С помощью элемента 21 масштабирования обеспечивается согласование кода заданной скорости (код КЗС) и кода действительной скорости (код КДС).
Второй регулирующий блок 2 (первы вариант, фиг.З) содержит регистр 22, элемент 23 , элемент 24 сравнения, элемент 25 масштабированияj интегратор 26, сумматор 27 и элемент 28 масштабирования, В регистр
22по сигналу записи заносится код длительности интервала. В элементе
23памяти хранится функция как величина , обратная коду длительности интервала. Таким образом, с выхода элемента 23 памяти поступает код действительной скорости КДС. Функции элементов 25 - 28 второго регулирующего блока 2 аналогичны функциям соответствующих элементов 17-21 первого регулирующего блока I, С выхода элемента 28 масштабирования поступает код управления.
Второй регулирующий блок 2 (второй вариант, фиг.4) содержит регистр 29, элемент 30 памяти., элемент 31 сравнения, элемент 32 масштабирования , функции этих элементов аналог{тч ны функциям элементов 22 - 28 соответственно .
Первый регулирующий блок 1 может быть также реализован по функционал ной схеме, изображенной на фиг.2, с исключением элементов 18, 19 и 20. Вариант реализации первого и второго 2 регулирующих блоков выбирается в зависимости от требований по то точности и быстродействию, предъяд- ляемых к системе.
Блок 3 синхронизации (фиг.5) содержит генератор 33, двоичный счетчи 24, дешифратор 35, элементы И 36, 37 и 38, делитель 39 частоты. Генератор 33 предназначен для формирования последовательности импульсов высокой частоты. Дешифратор 35 предназначен
ДД1Я формирования активных уровней последовательно на каждом из своих выходов в зависимости от комбинации ло- 1 ических уровней, поступающих с информационных выходов двоичного счетчика 34. С помощью элементов И 36 - 38 v осуществляется стробирование состояний выходов дешифратора 35. Делитель 39 частоты предназначен для формирования последовательности коротких импульсов, которые используются для оп- ределейия даительности временного интервала в датчике 6 скорости.
Преобразователь 4 код - ширина импульсов (фиг.6) содержит элемент И 40., двоичный счетчик 41 , D-триггер 425 элемент HJffl 43. Модуль кода управления записывается сигналом 1, поступающим на третий вход преобразователя 4 код - ширина импульсов, в двоичный счетчик 41, а знаковый разряд - в D-триггер 42. Сигнал логической единицы на выходе элемента ИЛИ 43 сохраняется до тех пор, пока не обнулится содержимое двоичного счетчика 41 путем поступления импульсов на его вычитаюш 1Й вход. Поступление вычитающих импульсов прекращается если на управляющий вход элемента PI 40 поступает сигнал логического нуля.
Датчик 5 перемещения (фиг.7) содержит реверсивный двоичный счетчик 52 и регистр 53. В реверсивном двоичном счетчике 52 формируется двоичный дополнительный код перемещения за счет поступления позиционных импульсов на суммирующий или вычитающий его вход.. В регистре 53 происходит периодическая перезапись тактовым сигналом содержимого двоичного реверсивного счетчика 52.
Датчик 6 скорости (фиг.8) содержит элемент ИЛИ 44, первьгй 45 и второй 46 Р;3 -триг геры, первый 47 и второй 48 элементы задержки, элемент И 49, двоичный счетчик 50 и регистр 51, Е двоичном счетчике 50 накапливаются импульсы высокой частоты, поступающие на его суммирующий вход через элемент И 49. С приходом каждого позиционного и тульса на один из входов элемента ИЛИ 44 происходит перезапись содержимого двоичпого счетчика 50 и состояния RS-тригге- ра 45 в регистр 51. RS-триггер 46 обеспечивает запирание суммирующего
7,1
входа двоичного счетчика 50 через элемент И 49. RS-триггер 45 является триггером знака. Элементы задержки 47 и 48 обеспечивают распределение во времени сигналов записи в регистр 51 и сброса двоичногр счетчика 50.
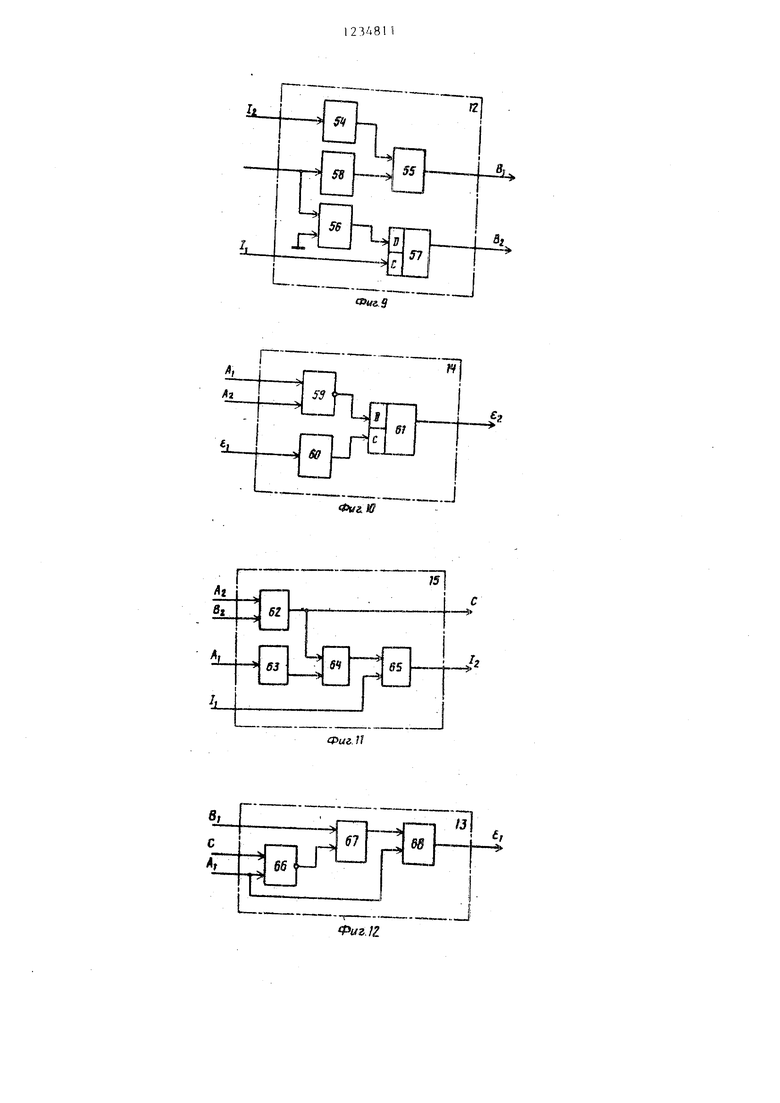
Преобразователь 12 налряжение - ширина импульсов (фиг.9) содержит генератор 54 пилообразного напряжения, первый 55 и второй 56 компараторы, D-триггер 57 и детектор 58. Генератор 54 пилообразного напряжения запускается тактовыми импульсами Ij. Компаратор 55 формирует импульсы путем сравнения пилообразного напряжения и выпрямленного напряжения с выхода детектора 54, на вход которого поступает напряжение с выхода датчика . 1 тока. Компаратор 56 формирует сигналы логических уровней в зависимости от полярности выходного напряжения датчика П тока. Выходной сигнал компаратора 56 переписывается сигналами I, в D-триггер 57,
Блок 14 определения знака (фиг.10 .содержит элемент ИСКЛЮЧАЩЕЕ ИЛИ-НЕ. 59, элемент 60 задержки и Б-триг- гер 61. Если сигнал А, имеет уровень логической единицы в момент прихода сигнала на вход записи D-триг- гера 61, то на его выходе уровень сигнала Я„ совпадает с уровнем сиг
нала А , в противном случае они вза- имообра.тны. Элемент задержки 60 необходим для того, чтабы запись сигнала в D-триггер 61 происходила после установления сигнала на выходе элемента ИСКЛЮ ШОЩЕЕ ИЛИ-НЕ 59.
Логический блок 15 (фиг.I1) содержит элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 62, формирователь 63 импульсов, элемент И 64 и элемент ИЛИ 65. Если сигналы А и Bi на входе элемента ИСКЛЮЧАЩЕЕ ИЛИ 62 совпадают, то на первом выходе jso- гического блока 15 формируется сигнал С в виде уровня логического нуля, в противном случае формируется сигнал С логической единицы. Формирователь .импульсов 63 формирует короткие импульсы в моменты перехода сигнала А из состояния логической единицы в состояние логического нуля. Сформированные импульсы поступают на второй вход элемента ИЛИ 65 через элемент И 64, если сигнал С имеет уровень ло- -ической единицы.
Блок 13 определения длительности и а1ульсов (фиг. 12) содержит элемент И--НЕ 66, элемент И 67 и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 68. Если сигнал С имеет уровень логической единигцз, то
0
5
0
5
0
5
0
5
0
длительность сигнала
я f
равна
сумме.
длительностей сигналов А . и В . Если сигнал С имеет уровень логического нуля, то длительность сигнала равна разности длительностей сигналов А и В .
Система работает следующим обра -- зом.
С пятого и четвертого выходов блока 3 синхронизации (фиг. и 5) поступают тактовые импульсы, первьй из которых обеспечивает появление на выходе датчика 5 перемещения кода действительного положения вала двигателя 9 путем перезаписи содержимого реверсивного двоичного счетчика 52 позиционных импульсов (фиг.8) в регистр 53, а второй - запись в регистр 16 первого регулирующего блока 1 (фиг.2) кода заданного перемещения, поступающего на первьш вход данного блока. В первом регулир тощем блоке происходит расчет кода заданной скорости который поступает на первый вход второго регулирующего блока (фиг.1 иЗ). На его второй вход поступает код длительности интервала, который находился в регистре 51 датчика 6 скорости (фиг.7) в момент появления на шестом выхо.де блока 3 синхронизации (фиг.5) тактового импульса, с помощью которого происходит запись кода длительности интервала в регистр 22 второго регулирующего блока 2 (фиг.З). Данный код является адресом ячейки элемента 23 памяти, в которо хранится I
соответствующий код действительной скорости. Далее во втором регулирующем блоке 2 происходит расчет кода управления, который по тактовому сигналу 1, поступающему на третий вход преобразователя 4 код - ширина импульсов (фиг.6), записывается в двоичный Счетчик 41 и триггер 42 данного преобразователя. На его первом выходе начинается формирование длительности и myльca А (фиг. 13), а на втором появляется логический сигнал А, соответствующий знаку кода управления. Одновременно по так- I.
товому сигналу
в преобразователе
12 напряжение - иирина импульсов
(фиг.П) появляется логический сит-- нал В,, соответствующий знаку напряжения датчика 11 тока исполнительного двигателя 9, кроме того, начинается формирование AJHiTeJibHOCTn импуль- са В , пропорционал ной модулю напряжения датчика 11 тока.
Пу.сть сигналы А и В , т.е. знаки кода управления и тока, совпадают (фиг.13). В этом случае логический блок 15 (фиг.11) формирует сигнал С в виде уровня логического нуля, в результате чего сигналы А и В, поступают на входь элемента ИСКЛЮЧАЮЩЕЕ ИПИ 68 блока 13 определения дпитель- ности импульсов (фиг.12). Сигнал А, (фиг,.6) цмеет уровень логической единицы до тех пор, пока содержимое двоичного счетчика А не станет равным нулю. Сигнал ВJ(фиг.9) имеет уровень логической единицы до тех пор, пока напряже и е генератора 54 пилообразного напряжения не сравняется с модулем напряжения, поступаю- . щего с выхода датчика И тока.
Сигнал , на выходе блока 13 определения длительности импульсов появляется в тот момент, когда один из сигналов А или В, становится равным нулю (фиг.12 и 13).
Пусть длительность сигнала А больше ддп1тельности сигнала В, . В этом случае в момент прихода на вход записи D-триггера 61 задержанного сигнала 1фиг.10) на информацион- ном входе 1 -триггера 61 находится логический сигнал, совпадаюи;ий по урон ню с сигналом Aj. Таким образом, сигнал f совпадает со знаком кода управления . По окончапни импульса А фор- мирователь 63 импульсов (фиг.11) формирует коротки) импульс, который, .однако, не появляется на втором выходе логического блока 15 и не запускает в данном случае генератор 5Д пи лообразного напряжения (фиг.9), так как сигнал С имеет уровень логического нуля, который запирает элемент И 64.
Сигналы t и7, поступают на вхо- ды усилителя 10 мощности. Первый из них определяет среднюю величину тока, протекающего через якорь ис- п.олнительного двигателя 9 за период между тактовыми импульсами I., , а вто рой - направление тока. В данном случае исполнител11ный двигатель 9 . вращается в таком направлении, чтобы
дли 1 ештность импульса В, через некоторое нремя сравнялась с длитель- liOCTbK) Aj , соответствупощей коду управления. В результате зтого исполнительный двигатель 9 вращается в на- 1гравлении к точке заданного положении, приводя в движение инкрементальный датчик 8, с обоих выходов которого поступают ifMnyjibCbi на входы формирователя 7 импульсов, который, в свою очередь, формирует импульсы на одном из выходов в зависимости от направлепия враи;ения исполнительного двигателя 9, число которых пропорционально углу поворота его вала. При этом изменяются показания датчиков 5 перемещения 6 С1«зрости. Изменение содержимог о регистра 53 датчика 5 перемещения (фиг.8) происходи в момент прихода тактового сигнала с пятого выхода блока 3 синхронизации. Содержимое регистра 51 датчика 6 скорости (фиг.7) изменяется с приходом каждого позициошюго импульса. С приходом очередного тактового сиг нала на третий вход первого ре- гулир тащего блока 1 начинается новый цикл управления, и система работает в соответствии с rфивeдeп Ъ м выше описанием.
Пусть сигналы А. и В , т.е. знаки кода управления и тока, совпадают, а длительность сит пала А , пропорциональная коду управления, меньгпе длительности сигнала В, , пропорциональной неличине напрчжсчшя датчика 11 тока (фиг. 13). В 11 том случае в момент прихода )а вход записи 1)-тригг ера 6 задержанного сигнала f (фиг.10) на информационном входе D-трнггера 61 находится логический сит пал с уровнем, обралным уровню сигнала А. Под воздейст} ием сигнала i ток в испол}1ител1.ном двигателе 9 уменьшится, и через некоторое время дл1 тельность сигнала В, срав- пяется с длительностью с:иг-пала А, .
Ес.ап сигна.чы А,, и В, иг совпадают (фиг. 13), то логически Плок 15 (фиг. 1 1: ) формирует сигнал С с уровнем логической eдi ниIUu. В этом случа ЯГ1ительность сигнала t, равна сумме длительностей сигналов Л. и В,,гтос- ледпий из ко-торых формиру(тся в результате запуска генератора 54 пилообразного напряжения (ф1-;г.)) импульсом, С(рормиро1занным формир пиателем 63 пмпу.чьсов после око11чак))я импч-льса А (фиг.12 и 13). В резульгате этого ток в иСпгишительном двигателе 9 изменяет свое направление на проти воположное.
Таким образом, в предлагаемой циф ровой системе управления отслеживание задаваемых перемещений происходит с высокой точностью и плавностью
Формула изобретения
1. Цифровая система управления, содержащая блок определения знака и последовательно соединенные усилитель мощности, датчик тока, исполнительный двигатель, инкрементальный датчик, формирователь импульсов, дат чик перемещения, первый регулируюп1Ий блок и второй регулирующий блок, подключенный выходом к первому входу преобразователя код - ширина импульсов, а вторым входом - к выходу датчика скорости, соединенного первым и вторым входами с соответствующими выходами формирователя импульсов, а также задатчик, подключенный выходом к второму входу первого регулирующего блока, и блок синхронизации, соединенный первым, вторым, третьим, четвертым, пятым и шестым выходами соответственно с вторЕ 1м и третьим входами преобразователя код - ширина импульсов и с третьими входами датчика скорости первого регулирующего блока, датчика перемещения и второго регулирующего блока, о тличаю- щ а я с я тем, что, с целью noBbiuie- ния точности cиcтe tы, в ней дополнительно установлены блок определения длительности импульсов, логический блок и преобразователь напряжение - ширина импульсов, соединенный первым входом с информационным выходом датчика тока, вторым входом - с вторым выходом логического блока, третьим входом - с вторьрм выходом блока синхронизации и с четвертым входом логического блока, первым выходом - с первым входом блока определения длительности HMnyjUiCOB, а вторым выходом - с первым входом логического блока, подключенного вторым входом к первому выходу преобразователя код ширина импульсов, к второму входу блока определениядлитeJП-иocти импульсов и- к второму входу блока определения знака, третьим входом - к второму выходу преобразователя код - ши25
3481 1I 2
пша lг пyJlьcoв и к третьему блока определения знака, а первым выходом - к третьему входу блока определения длительности импульсов, соi; едир1енр1ого выходом с первыми входами блока определения знака и усилителя мощности, подключенного вторым входом к выходу блока определения знака.
2.Система управления по п. 1, О отличающаяся тем, что
преобразовате; Ь напряжение - ширина импульсов содержит первый компаратор, соединенный первым входом с выходом генератора пилообразного напря 5 жения, а вторым входом - с выходом детектора, подключенного входом к первому входу второго компаратора, соединенного вторым входом с общей шиной, а выходом - с информационным
20 входом D-триггера, причем вход детектора, вход генератора пилообразного напряжения, вход записи D-триг- Г ера, выход первого компаратора и выход D-триггера являются соответственно первым, вторым и третьим входами и первым и pTopi M выходами преобразователя напряжение - ширина импульсов .
3.Система управления по п. , 30 отличающаяся тем, что
блок определе ия знака содержит D- триггер, соединенный информационным входом с выходом элемента ИСКЛЮЧАИЦЕЕ ШТИ-НЕ, а входом записи - с выходом
35 элемента задержки, причем первый и второй входы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, вход элемента задержки и выход D-триггера являются соответственно вторым, третьим и первым вхо40 дами и выходом блока определения знака .
4.Система управления по п. 1, отличающаяся тем, что логический блок содержит элемент И,
45 соединенный первым входом с выходом элемента ИСЮПОЧАЮЩЕЕ ИЛИ, вторым входом - с выходом формирователя импульсов, а выходом - с вторым входом элемента ИЛИ, причем второй вход эле50 мента ИСКЛЮЧ/МОЩЕЕ ИЛИ, вход формиро- - вателя импульсов, первый вход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, первый вход и выход элемента ИЛИ являются первым, вторым, третьим и четвертым входами и
55 выходом логического блока.
5.Система управления по п. 1 , отличающаяся тем, что блок определения длительности импуль13123ч81
сов-содержит элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, соединенный первым входом с вторым входом элемента И-НЕ, а вторым входом - с выходом элемента И, подключенного первым входом к выходу эле- мента И-НЕ, причем второй вход эле114
мента И, первый и второй входы элемента И-НЕ и выход элемента ИСКЛЮЧАЮЩЕЕ 1ШИ являются первым, вторым и третьим входами и выходом блока определения длительности импульсов .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения информации на экране электроннолучевой трубки | 1984 |
|
SU1257635A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство формирования электронного визира для съема координат с экрана электронно-лучевой трубки с растровой разверткой | 1991 |
|
SU1774273A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| Устройство для управления преобразователем частоты с непосредственной связью и широтно-импульсным регулированием | 1989 |
|
SU1624629A1 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Система стабилизации задержки | 1981 |
|
SU957422A1 |
Система относится к области станкостроения и робототехники и может найти применение при управлении электроприводами роботов и станков с числовым программным управлением. В системе решается задача компенсации неконтролируемых возмущений, действующих на рабочий орган робота. Эта задача решается путем использования модифидиро-ванного контура регулирования тока. При этом сигнал задания поступает на один из входов первого регулирующего блока, в котором сравнивается с выходным сигналом датчика перемещения и на выходе которого формируется сигнал задания сконости. Этот сигнал поступает во второй регулирующий блок, в котором сравнивается с выходным сигналом датчика скорости и на выходе которого формируется сигнал задания тока. Этот сигнал преобразуется в преобразователе код - ширина импульсов и поступает на входы блока опре- деления знака, выходной сигнал которого несет информацию о знаке сигнала управления и поступает на первый вход усилителя мощности. Выходной сигнал датчика тока преобразуется в преобразователе напряжение - ширина и myльcoв и поступает на вход блока определения длительности импульсов, выходной сигнал которого несет информацию о длительности импульса сигнала управления и поступает на второй вход усилителя мощности. Усилитель мощности формирует сигнал, воздействующий на исполнительный двигатель. Синхронизация работы блоков системы осуществляется сигналами логического блока и блока синхронизации. 4 з.п. ф-лы, 13 ил. оэ сл ts3 . 00
Фиг. 1
vOya. 3
Г
X
«to
..J
fot.t
Ipui. 7
iЧ
i6
9
+f
50
N-/
SJ
7
ib
5
ff
Фмгв
Г
Аг
55
Sff
л
Фи&Ш
Г
щ
Sf
J
ts
Фин.К
| Устройство для управления электроприводом | 1981 |
|
SU980067A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Батоврин А.А | |||
| и др | |||
| Цифровые сис- те№,1 управления электроприводами | |||
| М | |||
| : Энергия, 1977, с | |||
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
| Приборы и техника эксперимента, 1981, № 3, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
