Предлагаемое пзобрегение оамюсится i; и-звеоэд1ы.м механп.мам для ггрквгаелия в 0зврат1ю-поступателыюе движение с помощью двух центробежных грузов симметрично распо.тои,-енных н В ищаюн1в1хся в нрогавонолсжные гтороны.
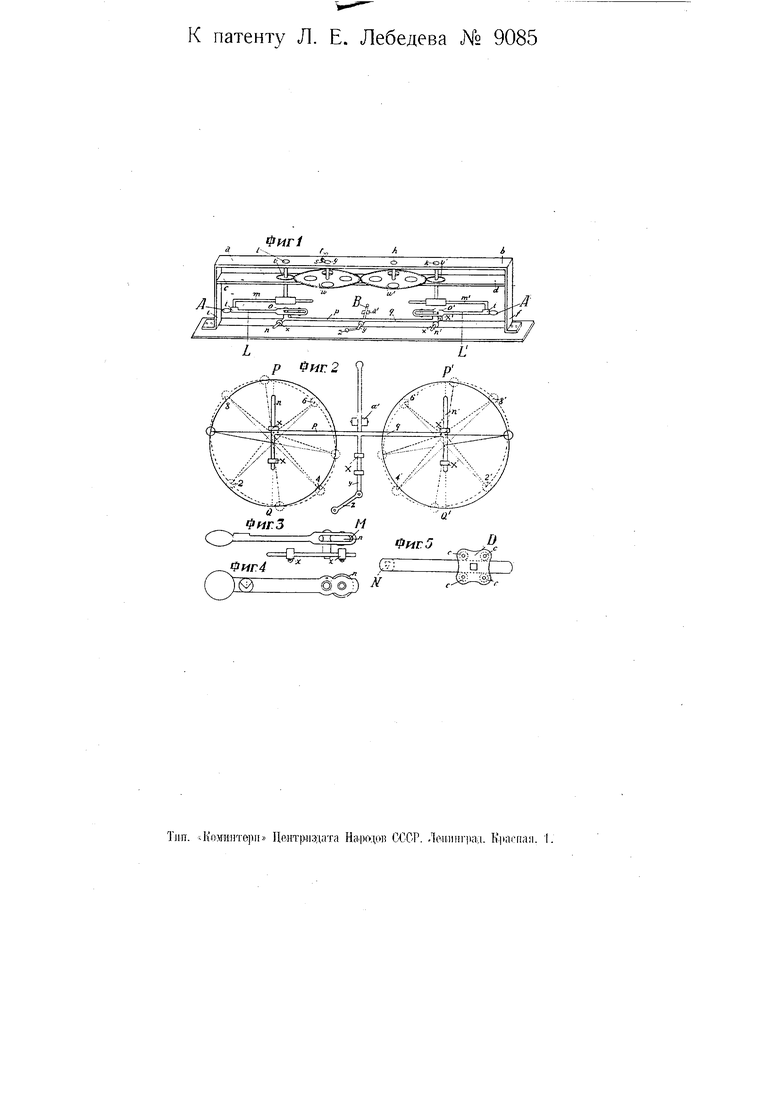
Fla чертеже фиг. i схематичее-ш изображает общнн вид механ113.та в перспекФнве: ()нг. 2 - 1ЯЩ подвижной )а.м.ки меха.низма сверху с различным по.тожепнем центробежных грузов; фиг. 3 - вщ несущего грузы стерж:ня сбоку; фиг. 4 - внд его сверху; фнг. 5 - вид несущего камп; ку.нга стержля ir его иаеравллющей сверху.
Рама механизма состоит ш двух пластин аЬ II с(1 (фиг. 1). раоно.юженных оДНа над другой горизонталыго л укрепленных на вертикальных стойках е и f фундамента. В этих пластинах ук теилшы четы} верти-кальных вала д, h, I и k. На валах (/и h между пластинами аЬ и cd укренлепы два одинаковых, сцепляющихся между собой зубчатых колеса w и w, иа крайних же галах I и k прочно насажены одинаковые шестерни г л v сцепляющиеся с колесами и; и w Нижние четырехгранные, концы Baijioe/ л А:иесут стержии т и П1 расположенные сш1метртгано к ;-редией липни механизма и вращающие
в иротч 1 онолож.иы( стороны два iprrpoбежных груза .4 и .1 та1{ж сохраяяющие свое симметричное распатожение во вс« время двнжвния. как и стержни т л in. На верхнем конце вала д устроен кривощ«и S, на который действует шатуи t неринчного двигателя, ирниодящего механизм в движение.
Возвратио-ностуиательн. движение в ме.тантшге нолуча.ют от отдельной рамки pq (фиг. 1. 2). нмеющай кщ буквы Я, на концах которой укреплены цанфы о и о; воKpjT последних врщаются стержли L л d центробежный грузами .4 и .Г. Боковые отростки н и п рамки pq своГ/одио ходят ири ее возвратно-поступательном двнженни в наи апля101Щ1Х .х.х и х.х Эти направляющие неподвижно укреилсны в фуддаМенте и ограничивают величину хода рамки с цеитробежпы5 и .мп. К средней части рамки по ,1И:1гш1 действия равнодействующей центробежных сил грузов .4 и Л прикреилеи горизоптальпый стерж.е-иь ij с щатуиам г, иоредающим движение последнего. Наконец, с ггротжвоноложно щатуну г стороны подвижной раМкн р(1 на,Ходдп-оя тормозиый рычаг В, не уча.ствую1ЩП1 в переа.в1ГАЧЧ1иях рамки и служаищй лтппь для остановки
noc,ie;i;iiei1. С этой це,11)Ю он может псворачиваткоя в -вертшалкной илоокости па стойке а , против оре;1 ией части рамки р, имеющей снизу пиш. который плотно входит в ооагветствующий ему иаз иа шице рычага при его нажатш. чем и достигается затормажввалие и остановка рижеиия раМКц. В виду возможиого pasuiiткя 1трузами Л л /Г большой центробежной силы на цапфах о н о будет зиачитеаьяое давлешю и обусловлениое и.м трение. С целью уменьшения этого атревия. шнец каждого стержня L и- L, падетый иа цапфу, имеет прорез М (ф1П 3. 4). в который всташен ро.гик п, кагащийся ио соотвечствующей кольцевой выточке цапфы. Стержни L и V в точках г inaipHHpHO соединены с ведущнМи стсржлями т п /н камлей кулис. у1Креален1ных на. Bjiaax / н /,-, Кулисы D (фнг-. о) .тлоют четъсре, ролика с. цаправляюЩИо -стерж-нл и in, конец 1;оторых л 1шляется камлем д.Т;Я кулис. Движение стержней т ц. т в кулиса х ,ио том. что щи возврс1Т)И,о-ло стуиатйчьиых порвмещепмкгх ра.М1Кн также перемещаются п цапфы и к и в то время как валы I я I;. с насажен«ы.ми на них кулисами mmoi- только l palr aтeлыloe двккеице: та«И1М (йразом лалл.ч1ге, кулис имеет целью дать возмо.кноси стержням т и /« в точках i следоваггь ло траекпри iwTiii. онисьшшймого те;мц точ1;амиг стержней L ц /;.
У|П01Мшй нередаюп ий усилие конец стержней т ц in выполняется в виде треугольного шипа Л , обращбииого острие м в cix)pony пфащолия €тq) и входящего в сектор СТержпей I и V (ijuir. 4). имеющий бслылий размер, чем пигп .V. с дсмью возможиого к().1ебан1И,я цослед 1 его в секторе, отп;;сительп.о 1 ертикальной оси. проходящей через улорцуш isepHimiy шина N.
Действие MexaiiiU3Ma .1ля возвратпо-постуиателыюго дв1г/кенц:я происходит следуюп1нм образом: включенном тормозе В, рамка pq 11 цаифы о о нелолвн;ьлы; цецтробежпые же грузы .4 и .4 враишются в лротившо.ЮЖНые стороиы вокруг цапф о ц о1. получая свое движенце от нервичцого двцгатеч1я через no&peftmiBo шатуиа / и дальиейшей иередачи. При вращении грузов А ц 4 они развивают центробежпъю силы., результирующая которых и сообщит возвратно-лостунательное движение рам1« pq, как только последняя бу,дет освобождена ут- (ейетвля ггормша и. При движении рамЕИ fq иередвижение цадгф о л о стержней I и V цз)1ецяеа траекторию цутц грузов А ц А т круга в кривук, оходлуюс эллипсом (фиг. 2). большая ось i;oix)poro нри лредлоложеицц 1 авиомерпого дйижения цалф, располагается по линши 4,8 ;и . а малая ось но .1И:н;ии 2.6 и 2.G. В положеппл грузов .па лцния1Х IQ и Pft целтробежлые силц будут liaраллельлы друг другу п рашгодействующая их достигнет налбольшего эпаления.
Посредством шатуна z (фиг. 1. 3) возвратцо-поступательпое. д.вцженпе раанш 1щ может быть передано нриемнику зтого движения.
П р е дм ет иа/геита.
Механизм для цршведенля в возв штноиостуиательпое двцжепие с помощью нары симметрично расиоложеппых п вращаюЩихоя в проТ|Цвоцолож1иые сторны целтробежиых грузов. характе)изующпйся тем. что песущие цептробежцые г)узы А и .4 (фцг. 1) стержли I н Г. поворотно укреллеилые ла цанфах о ц о рам-кп yq, возгфатио- пост у иательлов диижеиие которои огранлчено ланравляютцимл ./ и ;г (фиг. 1-3), ик риирло соеДШтены в точках г (фщ. 1) со стерж-НЯМИ т и т камлей кулис, укрепуюпиых ла вала1Х I и А-. вра1цаемых с по:мощыо зубчатой це.редач1г с од.1игаковой скоростью в противоиоложiii ie стороиы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прицепной землеройный струг | 1953 |
|
SU102488A1 |
| Способ навинчивания резьбовых изделий и устройство для его осуществления | 1955 |
|
SU111927A1 |
| Батометр | 1978 |
|
SU744267A1 |
| Аппарат для объемного обмера зерновых материалов | 1935 |
|
SU51334A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ ТОЧЕК ГРАНИЧНОЙ ЛИНИИ | 1971 |
|
SU313709A1 |
| Клавишный музыкальный инструмент | 1929 |
|
SU14779A1 |
| Каретка подвесной канатной дороги с маятниковым движением | 1957 |
|
SU113068A1 |
| Способ контроля роторов короткозамкнутых асинхронных двигателей | 1950 |
|
SU93833A1 |
| Механизм образования петель ткани в камерах для ее обработки | 1974 |
|
SU507505A1 |
| Волокносборник к пневматическому мычкоуловителю для прядильных машин | 1954 |
|
SU100261A1 |