(54) ЗАХВАТ ПЛОСКИХ ПРЕДМЕТОВ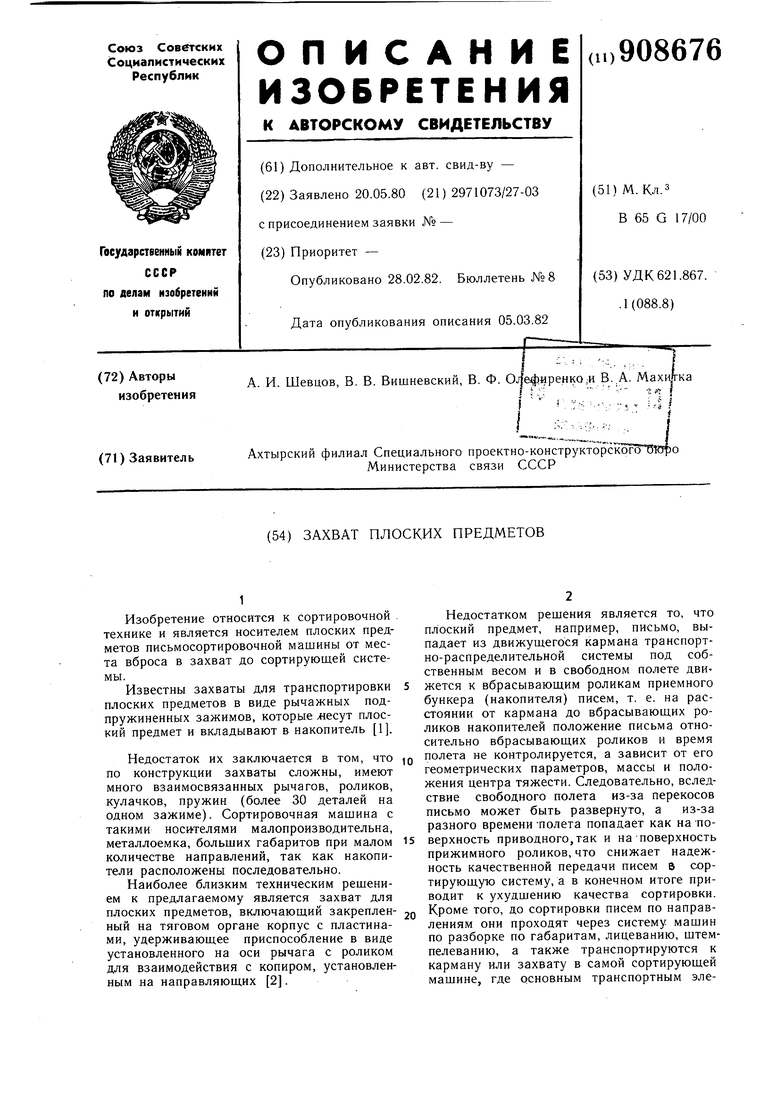
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выгрузки плоских предметов из накопителей | 1980 |
|
SU959848A1 |
| Устройство для транспортирования плоских предметов | 1984 |
|
SU1252257A1 |
| Накопитель для автоматической письмосортировочной машины | 1979 |
|
SU895557A1 |
| Устройство для вывода пачек писем из автоматической письмосортировочной машины | 1977 |
|
SU692766A1 |
| Устройство для сортировки предметов | 1977 |
|
SU656676A1 |
| Машина для сортировки плоских предметов | 1980 |
|
SU895550A1 |
| Накопитель для писем автоматической письмосортировочной машины | 1978 |
|
SU776663A1 |
| Устройство для отделения и выдачи писем, газет и тому подобных предметов, например, к письмосортировочной машине | 1956 |
|
SU109925A1 |
| Машина для сортировки,лицевания и штемпелевания плоских предметов | 1985 |
|
SU1287956A1 |
| Почтовый ящик | 1986 |
|
SU1375526A1 |
1
Изобретение относится к сортировочной . технике и является носителем плоских предметов письмосортировочной машины от места вброса в захват до сортирующей системы.
Известны захваты для транспортировки 5 плоских предметов в виде рычажных подпружиненных зажимов, которые лесут плоский предмет и вкладывают в накопитель 1.
Недостаток их заключается в том, что Q по конструкции захваты сложны, имеют много взаимосвязанных рычагов, роликов, кулачков, пружин (более 30 деталей на одном зажиме). Сортировочная машина с такими носителями малопроизводительна, металлоемка, больших габаритов при малом 15 количестве направлений, так как накопители расположены последовательно.
Наиболее близким техническим решением к предлагаемому является захват для плоских предметов, включающий закреплен- JQ ный на тяговом органе корпус с пластинами, удерживающее приспособление в виде установленного на оси рычага с роликом для взаимодействия с копиром, установленным на направляющих 2.
Недостатком решения является то, что плоский предмет, например, письмо, выпадает из движущегося кармана транспортно-распределительной системы под собственным весом и в свободном полете движется к вбрасывающим роликам приемного бункера (накопителя) писем, т. е. на расстоянии от кармана до вбрасывающих роликов накопителей положение письма относительно вбрасывающих роликов и время полета не контролируется, а зависит от его геометрических параметров, массы и положения центра тяжести. Следовательно, вследствие свободного полета из-за перекосов письмо может быть развернуто, а из-за разного времени полета попадает как на поверхность приводного,так и на поверхность прижимного роликов, что снижает надежность качественной передачи писем в сортирующую систему,а в конечном итоге приводит к ухудшению качества сортировки. Кроме того, до сортировки писем по направлениям они проходят через систему машин по разборке по габаритам, лицеванию, штемпелеванию, а также транспортируются к карману или захвату в самой сортирующей машине, где основным транспортным элементом служат синтетические ремни, от которых поверхность письма заряжается статическим электричеством. Такое писыйо после выброса в карман или захват транспортно-распределительной системы .притягивается к одной из боковых поверхностей и с ней сцепляется, а при открывании дна кармана из него под собственным весом не выпадает, что также снижает надежность передачи писем из транспортно-распределительной системы в сортирующую систему.
Цель изобретения - сохранение в момент выгрузки ориентированного положения предметов.
Указанная цель достигается тем, что захват снабжен установленным с возможностью перемещения между пластинами толкателем с механизмом поворота, закрепленным на общей оси со следящим механизмом дополнительным рычагом с роликом и установленными на направляющих с возможностью взаимодействия с роликом дополнительного рычага упорами, при этом механизм поворота выполнен в виде системы вилок и тяги, связанных с дополнительным рычагом.
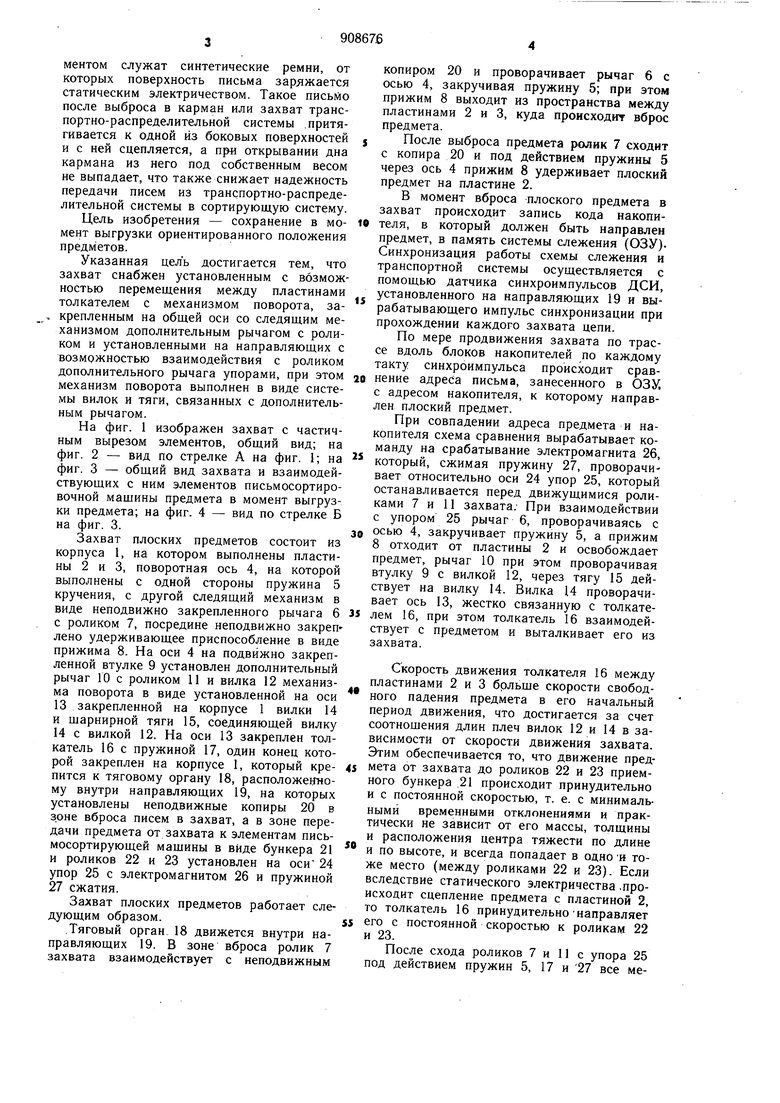
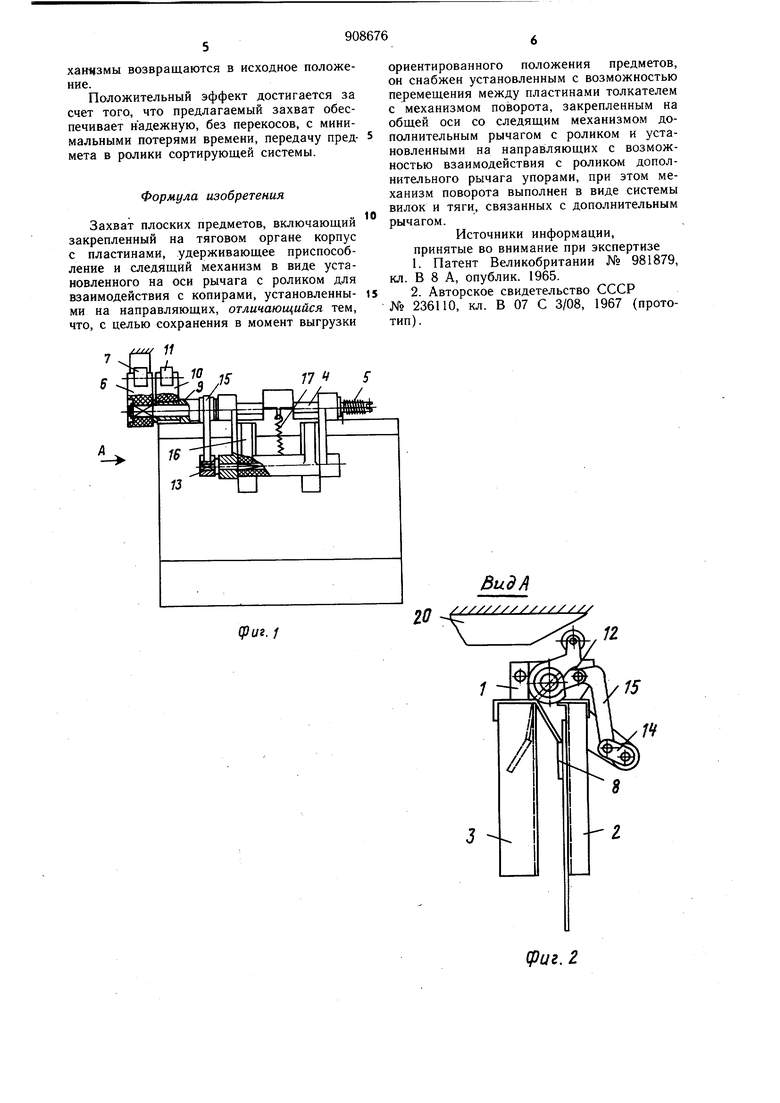
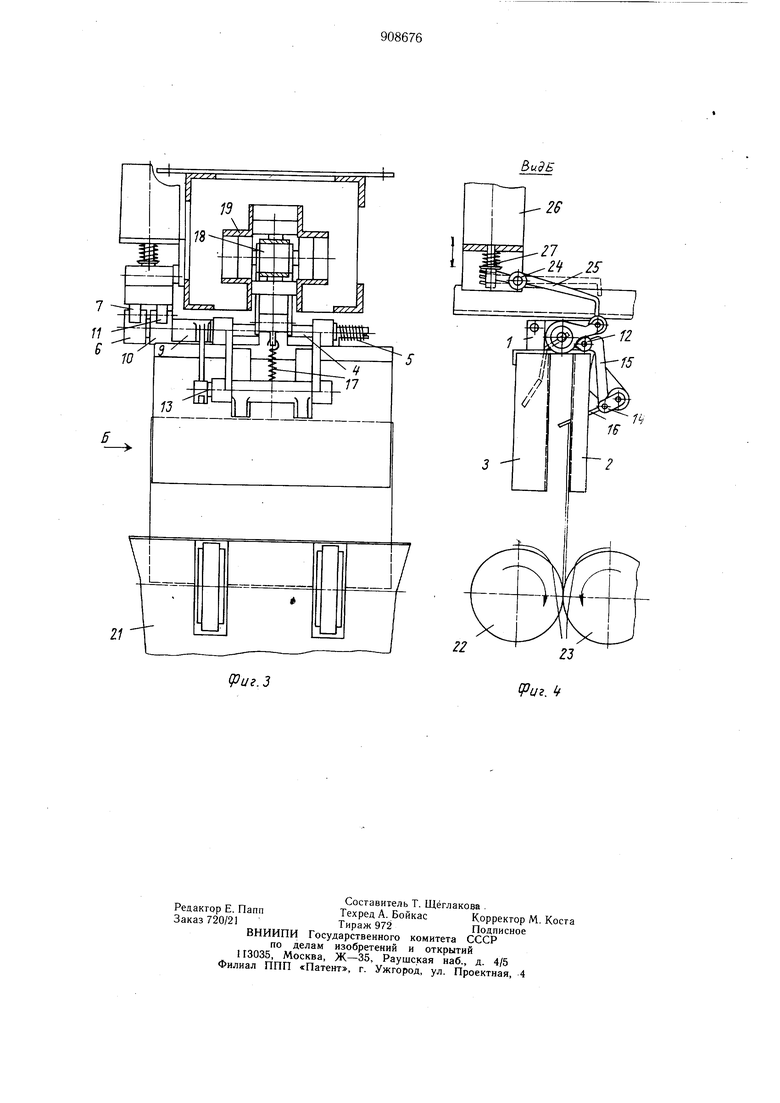
На фиг. 1 изображен захват с частичным вырезом элементов, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - общий вид захвата и взаимодействующих с ним элементов письмосортировочной мащины предмета в момент выгрузки предмета; на фиг. 4 - вид по стрелке Б на фиг. 3.
Захват плоских предметов состоит из корпуса 1, на котором выполнены пластины 2 и 3, поворотная ось 4, на которой выполнены с одной стороны пружина 5 кручения, с другой следящий механизм в виде неподвижно закрепленного рычага 6 с роликом 7, посредине неподвижно закреп лено удерживающее приспособление в виде прижима 8. На оси 4 на подвижно закрепленной втулке 9 установлен дополнительный рычаг 10 с роликом 11 и вилка 12 механизма поворота в виде установленной на оси
13закрепленной на корпусе 1 вилки 14 и щарнирной тяги 15, соединяющей вилку
14с вилкой 12. На оси 13 закреплен толкатель 16 с пружиной 17, один конец которой закреплен на корпусе 1, который крепится к тяговому органу 18, расположен ому внутри направляющих 19, на которых установлены неподвижные копиры 20 в зоне вброса писем в захват, а в зоне передачи предмета от захвата к элементам письмосортирующей мащины в виде бункера 21 и роликов 22 и 23 установлен на оси 24 упор 25 с электромагнитом 26 и пружиной 27 сжатия.
Захват плоских предметов работает следующим образом.
Тяговый орган, 18 движется внутри направляющих 19. В зоне вброса ролик 7 захвата взаимодействует с неподвижным
копиром 20 и проворачивает рычаг 6 с осью 4, закручивая пружину 5; при этом прижим 8 выходит из пространства между пластинами 2 и 3, куда происходит вброс предмета.
После выброса предмета ролик 7 сходит с копира 20 и под действием пружины 5 через ось 4 прижим 8 удерживает плоский предмет на пластине 2.
В момент вброса плоского предмета в захват происходит запись кода накони0 теля, в который должен быть направлен предмет, в память системы слежения (ОЗУ). Синхронизация работы схемы слежения и транспортной системы осуществляется с помощью датчика синхроимпульсов ДСИ, установленного на направляющих 19 и вырабатывающего импульс синхронизации при прохождении каждого захвата цепи.
По мере продвижения захвата по трассе вдоль блоков накопителей по каждому такту синхроимпульса происходит сравнение адреса письма, занесенного в ОЗУ, с адресом накопителя, к которому направлен плоский предмет.
При совпадении адреса предмета и накопителя схема сравнения вырабатывает команду на срабатывание электромагнита 26,
который, сжимая пружину 27, проворачивает относительно оси 24 упор 25, который останавливается перед движущимися роликами 7 и 11 захвата. При взаимодействии с упором 25 рычаг 6, проворачиваясь с
0 осью 4, закручивает пружину 5, а прижим 8 отходит от пластины 2 и освобождает предмет, рычаг 10 при этом проворачивая втулку 9 с вилкой 12, через тягу 15 действует на вилку 14. Вилка И проворачивает ось 13, жестко связанную с толкателем 16, при этом толкатель 16 взаимодействует с предметом и выталкивает его из захвата.
Скорость движения толкателя 16 между пластинами 2 и 3 брльще скорости свободного падения предмета в его начальный период движения, что достигается за счет соотношения длин плеч вилок 12 и 14 в зависимости от скорости движения захвата. Этим обеспечивается то, что движение предмета от захвата до роликов 22 и 23 приемного бункера ,21 происходит принудительно и с постоянной скоростью, т. е. с минимальными временными отклонениями и практически не зависит от его массы, толщины и расположения центра тяжести по длине и по высоте, и всегда попадает в одно и тоже место (между роликами 22 и 23). Если вследствие статического электричества.происходит сцепление предмета с пластиной 2, то толкатель 16 принудительно-направляет
его с постоянной скоростью к роликам 22 и 23.
После схода роликов 7 и 11 с упора 25 под действием пружин 5, 17 и 27 все механ1 змы возвращаются в исходное положение. Положительный эффект достигается за счет того, что предлагаемый захват обеспечивает надежную, без перекосов, с минимальными потерями времени, передачу предмета в ролики сортирующей системы. Формула изобретения Захват плоских предметов, включающий закрепленный на тяговом органе корпус с пластинами, удерживающее приспособление и следящий механизм в виде установленного на оси рычага с роликом для взаимодействия с копирами, установленными на направляющих, отличающийся тем, что, с целью сохранения в момент выгрузки ориентированного положения предметов, он снабжен установленным с возможностью перемещения между пластинами толкателем с механизмом поворота, закрепленным на общей оси со следящим механизмом дополнительным рычагом с роликом и установленными на напра1вляющих с возможностью взаимодействия с роликом дополнительного рычага упорами, при этом механизм поворота выполнен в виде системы вилок и тяги, связанных с дополнительным рычагом. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № 981879, кл. В 8 А, опублик. 1965. 2.Авторское свидетельство СССР № 236110, кл. В 07 С 3/08, 1967 (прототип).
(риг.
,
21
ВиЗБ
S
/Риг.З
Риг.
