(54) СПОСОБ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ
1
Изобретение относится к вибротранспорту и может быть использовано при автозагрузке, сортировке и разделении потоков транспортируемых деталей и других мелких штучных предметов.
Известен способ транспортирования зерна по ситу рассева, основанный на том, что ситу сообщают круговые поступательные движения в плоскости сита, а на пути движения П1)одукта устанавливают направляющие гребенки 1.
Наиболее близким к предлагаемому является способ вибротранспортирования, заключающийся в том, что грузонесущему органу сообщают продольные и поперечные периодические колебания, а в моменты наибольшей скорости рабочего органа ему дополнительно сообщают периодические импульсные воздействия снизу вверх 2.
Известные способы не позволяют изменять направление вибротранспортирования, которое задается в них однозначно конструктивно.
Цель изобретения - обеспечение заданного направления транспортирования.
Указанная цель достигается тем, что грузонесущему органу сообщают периодические движения в горизонтальной плоскости и импульсные воздействия в вертикальном направлении, причем периодические движения в горизонтальной плоскости задают в виде круговых поступательных движений,
5 а периодические вертикальные воздействия задают в виде импульсов силы, направленых снизу вверх в моменты, когда направление вектора скорости движения совпадает с направлением транспортирования.
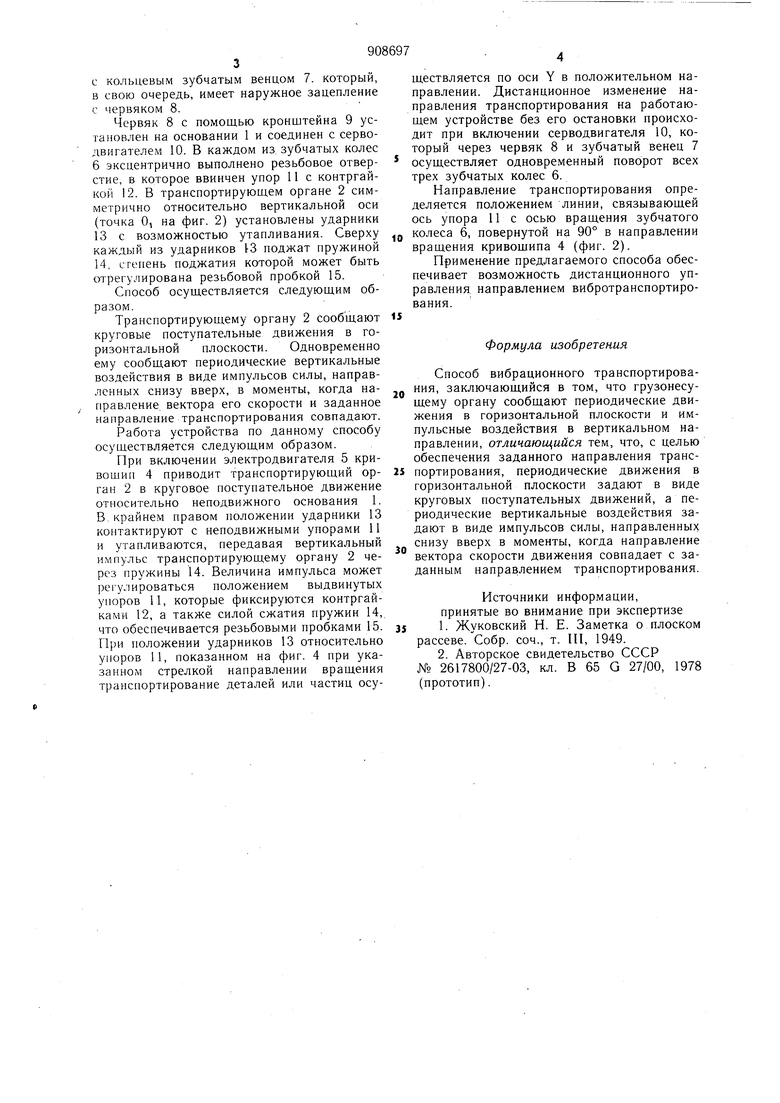
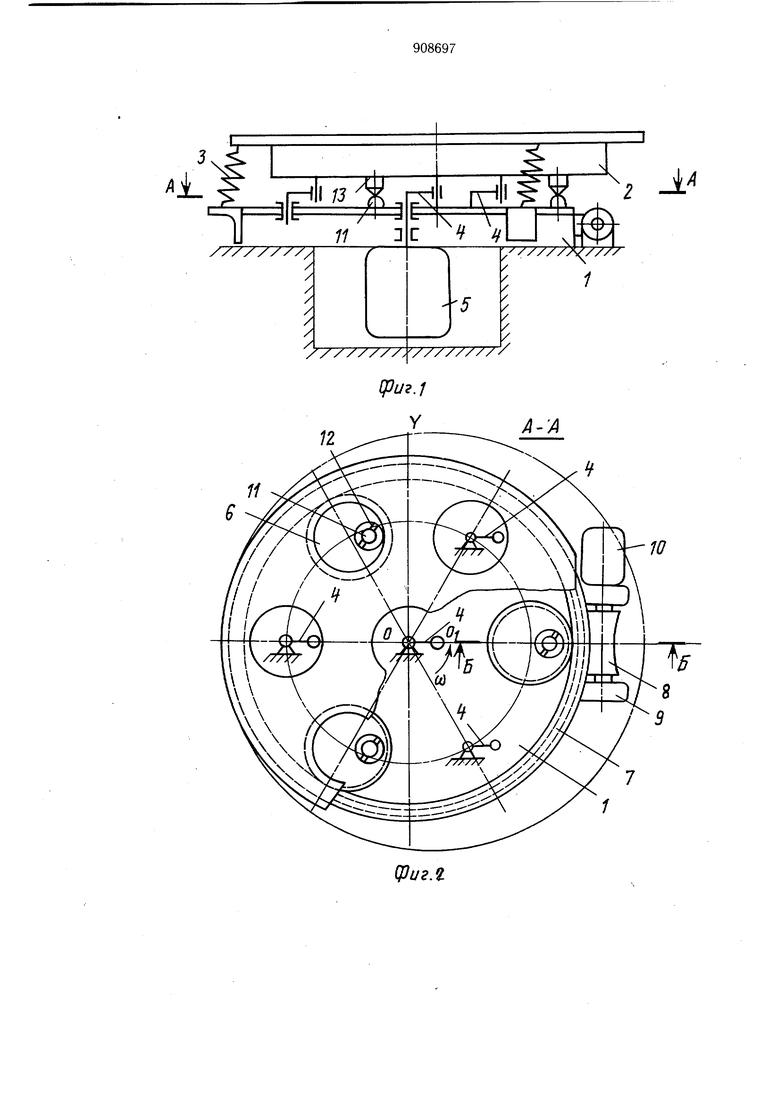
10 На фиг. 1 показано устройство для реализации способа, общий вид; на фиг. 2 - разрез А-А на фиг. 1 в крайнем правом положении транспортирующего органа в момент сообщения ему вертикального импульса. На фиг. 3 - разрез Б-Б на фиг. 2
5 ударника, контактирующего с ограничителем в рассматриваемый момент.
Устройство содержит основание 1, транспортирующий орган 2, связанный с основанием 1 пружинами 3 и кривошипами 4,
20 и электродвигатель 5. Все кривошипы установлены в одинаковом положении. В углублениях основания 1 симметрично относительного приводного вала электродвигателя 5 (точка О на фиг. 2) расположены зубчатые колеса 6, входящие в зацепление с кольцевым зубчатым венцом 7. который, в свою очередь, имеет наружное зацепление с червяком 8. Червяк 8 с помощью кронштейна 9 установлен на основании 1 и соединен с серводвигателем 10. В каждом из. зубчатых колес 6 эксцентрично выполнено резьбовое отверстие, в которое ввинчен упор 11 с контргайкой 12. В транспортирующем органе 2 симметрично относительно вертикальной оси (точка О, на фиг. 2) установлены ударники 13 с возможностью утапливания. Сверху каждый из ударников 13 поджат пружиной 14, степень поджатия которой может быть отрегулирована резьбовой пробкой 15. Способ осуществляется следующим образом. Транспортирующему органу 2 сообщают круговые поступательные движения в горизонтальной плоскости. Одновременно ему сообщают периодические вертикальные воздействия в виде импульсов силы, направленных снизу вверх, в моменты, когда направление, вектора его скорости и заданное направление транспортирования совпадают. Работа устройства по данному способу осуществляется следующим образом. При включении электродвигателя 5 кривошип 4 приводит транспортирующий орган 2 в круговое поступательное движение относительно неподвижного основания 1. В,крайнем правом положении ударники 13 контактируют с неподвижными упорами 11 утапливаются, передавая вертикальный импульс транспортирующему органу 2 через пружины 14. Величина импульса может ре1Ллироваться положением выдвинутых упоров 11, которые фиксируются контргайками 12, а также силой сжатия пружин 14, что обеспечивается резьбовыми пробками 15. При положении ударников 13 относительно упоров 11, показанном на фиг. 4 при указанном стрелкой направлении вращения транспортирование деталей или частиц осущестБляется по оси Y в положительном направлении. Дистанционное изменение направления транспортирования на работающем устройстве без его остановки происходит при включении серводвигателя 10, который через червяк 8 и зубчатый венец 7 осуществляет одновременный поворот всех трех зубчатых колес 6. Направление транспортирования определяется положением линии, связывающей ось упора 11 с осью вращения зубчатого колеса 6, повернутой на 90° в направлении вращения кривощипа 4 (фиг. 2). Применение предлагаемого способа обеспечивает возможность дистанционного управления направлением вибротранспортирования. Формула изобретения Способ вибрационного транспортирования, заключающийся в том, что грузонесущему органу сообщают периодические движения в горизонтальной плоскости и импульсные воздействия в вертикальном направлении, отличающийся тем, что, с целью обеспечения заданного направления транспортирования, периодические движения в горизонтальной плоскости задают в виде круговых поступательных движений, а периодические вертикальные воздействия задают в виде импульсов силы, направленных снизу вверх в моменты, когда направление вектора скорости движения совпадает с заданным направлением транспортирования. Источники информации, принятые во внимание при экспертизе 1.Жуковский Н. Е. Заметка о плоском рассеве. Собр. соч., т. III, 1949. 2.Авторское свидетельство СССР № 2617800/27-03, кл. В 65 G 27/00, 1978 (прототип).
luP
:3&
////// / / / / / / /
///
JjJ(
I rvHllf r
,.
H
777Г
/
/ / / / 1
/
/ / /
у Aфиг Л A
