(54) УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ МАГНИТНОЙ ЛЕНТЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением магнитной ленты | 1978 |
|
SU694895A1 |
| Устройство управления натяжением магнитной ленты | 1987 |
|
SU1571667A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Аппарат магнитной записи | 1979 |
|
SU832589A1 |
| Устройство для регулирования скорости транспортирования магнитной ленты | 1984 |
|
SU1216801A1 |
| Устройство для магнитной записи | 1976 |
|
SU619959A1 |
| Лентопротяжный механизм | 1981 |
|
SU964719A1 |
| Устройство для моделирования лентопротяжного механизма | 1982 |
|
SU1070574A1 |
| Аппарат магнитной записи | 1980 |
|
SU932560A1 |
| Устройство для управления электродвигателями | 1980 |
|
SU907746A1 |
I
Изобретение относится к приборостроению, в частности к аппаратам магнитной записи.
Известны устройства магнитной записи, содержащие лентопротяжный механизм с приводом носителя от катушек, кинематически связанных с двигателчми постоянного тока, подключенными к источника питания через ключевые схемы, магнитный носитель, сопряженный с блоком магнитных головок, диоды и командный блок, управляющий ключевыми схемами 1.
Недостатком этих устройств являetся низкая стабильность скорости движения носителя, так как двигатели управляются командами, не связанными с действительной скоростью носителя.
Наиболее близкое по технической сущности к предлагаемому устройство магнитной записи, содержащее первый и второй электродвигатели приемноподающих узлов, соединенные с выходами первого и второго ключевых элементов, подключенными к шине питания и подсоединенными к выходам соответственно первого и второго мультивибраторов, генератор импульсов, выход кото- рого подключен к входам третьего, четвертого, пятого и шестого мультивибраторов, датчик натяжения магнитг ной ленты, выход которого соединен сседьмым и восьмым мультивибраторами, входную шину сигнала управления
10 подтормаживанием, подсоединенную ко входу девятого мультивибратора, сумматоры и блок вычитания .2.
Известные устройства обеспечивают плавный пуск и останов носителя, одISнако, в установившемся режиме стабиль иость движения носителя недостаточна.
Цель изобретения - уменьшение неравномерности скорости перемещения
20 магнитной ленты.
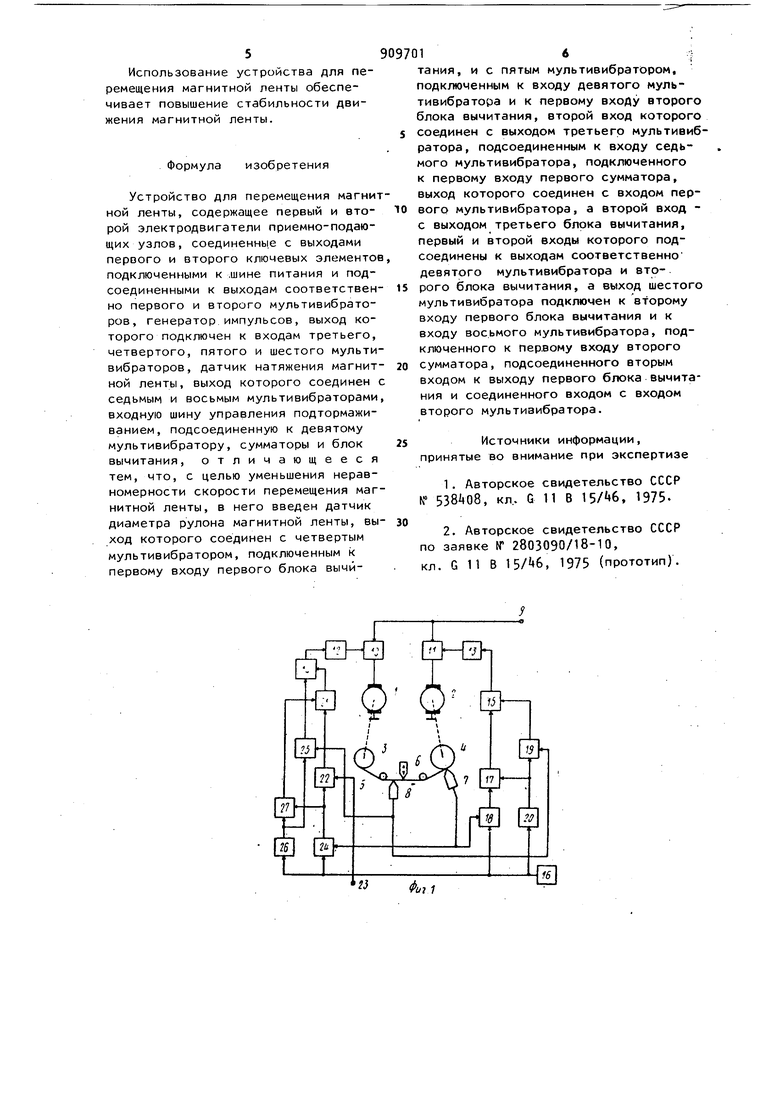
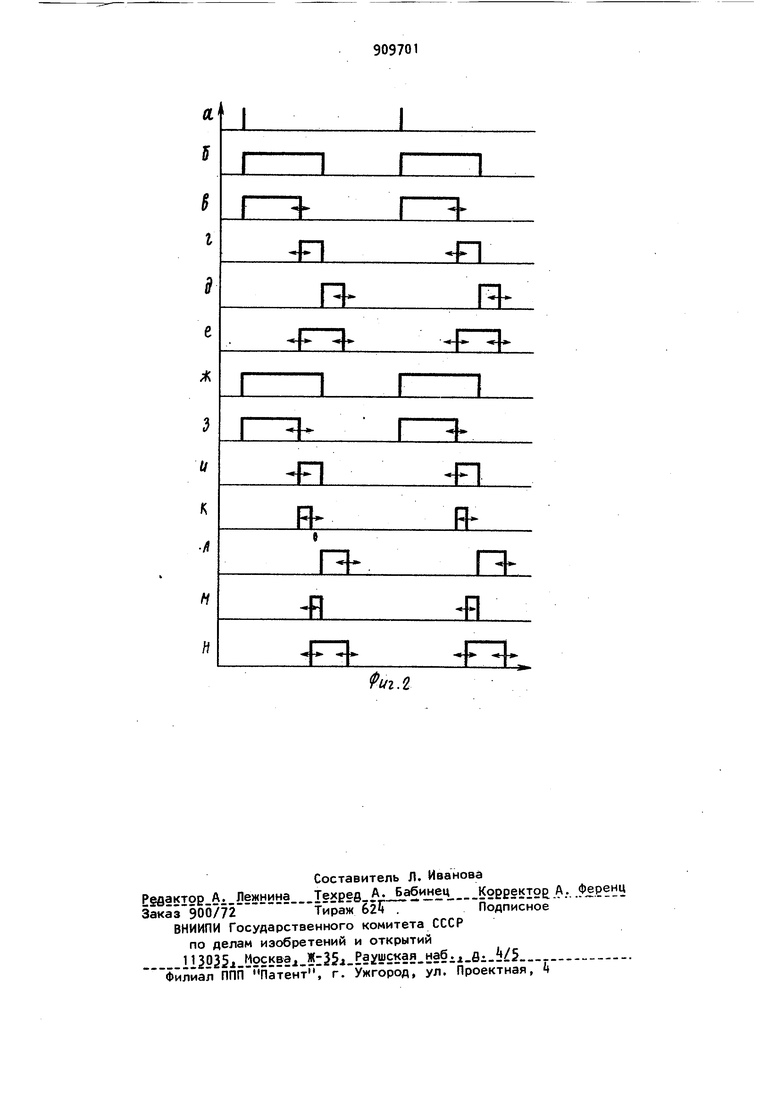
Поставленная цель достигается тем, чтр в устройство введен датчик диаметра рулона магнитной ленты, вы ход которого соединен с четвертым мультивибратором, подключенным к пе вому входу первого блока вычитания, и с пятым мультивибратором, подключенным ко входу девятого мультивибратора и к первому входу второго бл ка вычитания, второй вход которого соединен с выходом третьего мультивибратора, подсоединенным ко входу судьмого мультивибратора, подключен ного к первому входу первого суммат ра, выход которого соединен со вход первого мультивибратора, а второй вход - с выходом третьего блока вычитания, первый и второй входы кото рого подсоединены к выходам соответ ственно девятого мультивибратора и второго блока вычитания, а выход ше того мультивибратора подключен ко второму входу первого блока вычитания и ко входу восьмого мультивибратора, подключенного к первому входу второго сумматора, подсоединенного вторым входом к выходу первого блока вычитания и соединенного входом со входом второго мультивибратора. На фиг. 1 приведена блок-схема устройства для перемещения магнитной ленты; на фиг. 2 - диаграммы, поясняющие работу устройства. Устройство содержит двигатели 1 и 2 постоянного тока, кинематически связанные с катушками (приемноподающие узлы) 3 и 4, и магнитную лeнty 5, которая сопряжена с блоком 6 магнитных головок, датчик 7 диаметра рулона и датчик 8 натяжения ленты. Двигатели 1 и 2 подключены к зажиму 9 источника питания через ключе вые элементы 10 и 11, вторые входы которых соединены через управляемые мультивибраторы 12 и 13 с сумматорами 1 и IS- Входы сумматора 15 подключены к генератору 16 импульсов соответственно через блок 17 вычитания, управляемые мультивибраторы 18 и 19 и мультивибратор 20. Первый вход сумматора 1 подключен к генератору 16 импульсов через блок 21 вь1читания, управляемый мультивибратор 2.2, соединенный также с зажимом 23 управления подтормаживанием, и мультивибратор 2. Второй вход сум матора соединен с генератором 16 импульсов через управляемый мультивибратор 25 и мультивибратор 2б, выход которого подключен также через блок 27 вычитания ко второму входу блока 21 вычитания. Устройство работает следующим образом. Импульсы генератора 16 (фиг. 2а) запускают мультивибратор 20 и управляемый мультивибратор 18, длительность выходного потенциала кот.орого зависит от величины сигнала датчика 7 диаметра рулона (фиг. 26 и в) Потенциалы мультивибраторов 18 и 20 вычитаются схемой 17 вычитания, выходной сигнал которой (фиг. 2г) поступает на сумматор 15- На второй вход сумматора 15 поступает потенциал мультивибратора 19, длительность которого управляется сигналом датчика 8 натяжения носителя (фиг. 2д). Таким образом, мультивибратор 13, открывающий ключевую схему 11 для прохождения тока источника питания по зажиму 9 на двигатель 2, управляется сигналом, длительность которого зарисит от диаметра рулона и натяжения магнитной ленты (фиг. 2е). Импульсы генератора 16 запускают мультивибратор 2б (фиг. 2ж) и управляемый мультивибратор , длительность потенциала которого (фиг. 2з) зависит от сигнала датчика 7 диаметра рулона. Потенциалы мультивибраторов 26 и 2k вычитаются схемой 27 вычитания (фиг. 2и), при этом мультивибратор 2k задним фронтом своего потенциала запускает мультивибратор 22, длительность потенциала которого (фиг. 2к) управляется сигналом по зажиму 23, зависящим от типа двигателей, климатических условий и т.д. При этом задним фронтом мультивибратора 2б запускается мультивибратор 25 (фиг. 2л), управляемый сигналом датчика 8 натяжения. Схема 21 вычитывает потенциал мультивибратора 22 из сигнала схемы 27 и результирующий потенциал подается на первый вход сумматора 1 (фиг. 2м), на второй вход которого подается сигнал управляемого мультивибратора .25- Таким образом мультивибратор 12 управляется сигналом, длительность которого (фиг. 2н) зависит от сигналов датчика диаметра рулона, натяжения носителя и внешнего сигнала условий подтормаживания. Сигналами мультивибратора 12 открывается ключевая схема 10, и ток источника питания по зажиму 9 поступает на двигатель Г подтормаживающего узла. Использование устройства для перемещения магнитной ленты обеспечивает повышение стабильности движения магнитной ленты. Формула изобретения Устройство для перемещения магни ной ленты, содержащее первый и второй электродвигатели приемно-подающих узлов, соединенны.е с выходами первого и второго ключевых элементо подключенными к .шине питания и подсоединенными к выходам соответствен но первого и второго мультивибраторов, генератор импульсов, выход которого подключен к входам третьего, четвертого, пятого и шестого мульти вибраторов, датчик натяжения магнит ной ленты, выход которого соединен седьмым и восьмым мультивибраторами входную шину управления подтормаживанием, подсоединенную к девятому мультивибратору, сумматоры и блок вычитания, отличающееся тем, что, с целью уменьшения неравномерности скорости перемещения ма1 нитной ленты, в него введен датчик диаметра рулона магнитной ленты, вы ход которого соединен с четвертым мультивибратором, подключенным к первому входу первого блока вычитания, и с пятым мультивибратором, подключенным к входу девятого мультивибратора и к первому входу второго блока вычитания, второй вход которого соединен с выходом третьего мультивибратора, подсоединенным к входу седьмого мультивибратора, подключенного к первому входу первого сумматора, выход которого соединен с входом первого мультивибратора, а второй вход с выходом третьего блока вычитания, первый и второй входы которого подсоединены к выходам соответственно девятого мультивибратора и второго блока вычитания, а выход шестого мультивибратора подключен к второму входу первого блока вычитания и к входу восьмого мультивибратора, подключенного к первому входу второго сумматора, подсоединенного вторым входом к выходу первого блока вычитания и соединенного входом с входом второго мультивибратора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР К , кл.. G 11 В , 1975. 2.Авторское свидетельство СССР по заявке W 2803090/18-10, кл. G 11 В , 1975 (прототип).
.г
